

Ijraset Journal For Research in Applied Science and Engineering Technology
A Comprehensive Study of Electric Vehicle Components, Applications, Limiting Factor and Protocols
Authors: Vishwanath Chalawadi, Sanjeeth P. Amminabhavi
DOI Link: https://doi.org/10.22214/ijraset.2022.41667
Certificate: View Certificate
Abstract
For the green transportation tool, EV great attraction from researchers, leading of extensive works. With the building of high-storage battery and EV, the more number of the EV will increases, because of that the simultaneously charging and discharging characteristics will gives new challenges to safe and stable. This paper introduces briefly some concepts of EV, including studies on EV, Components, Power required to move vehicle, Limiting Factors, Application, Types of EV Battery, and Protocols for EV Application.
Introduction
I. INTRODUCTION
Energy and environment are the two important challenges facing the development of human civilization in the earlier days. In recent days, fuel prices rising continuously, variations is also becoming rising the environmental protection of public thoughts is constantly increasing, the related rolls and regulations increasingly strict, “energy saving" and "emission reduction" has a fast realistic problem. Therefore, building new technology to reduce energy consumption and emissions has become an important direction of the building of automobile modern technology, the EV to achieve zero emissions and low fuel consumption, discussed about.
II. LITERATURE REVIEW
- This paper aims to inform the debate over how electric vehicle technology could be the lower-carbon 2020–2030 new vehicle fleet in Europe by collecting, analyzing, and aggregating the available research literature on the underlying method costs and carbon emissions.
- The current literature on plug-in electric vehicles (PEVs) with a focus on issues and solutions related to vehicle deployment and integration with the electrical grid.
- Estimated that 30% of the total cars across the world will run on electricity by 2026. An important component that is an integral part of all electric vehicles is the motor. The amount of torque that the driving motor delivers is what plays a decisive role in determining the speed, acceleration and performance of an electric vehicle.
III. ELECTRIC VEHICLE COMPONENTS
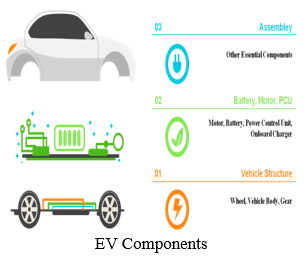
The important components of an Electric Vehicle:
A. Inverter
This converts direct current (DC) electricity, to alternating current (AC) electricity known inverter.
B. Motor
It is an electrical machine that converts electrical energy into mechanical energy.
C. Body
It is is an important part of an EV it will gives the shape and size to the EV.
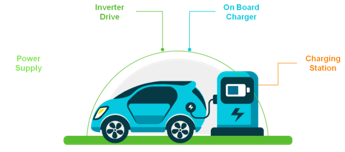
D. Power Grids for EVs
A Power grids for EVs, also called as EV charger point or electric vehicle supply equipment (EVSE), is supplies electrical power for charging plug-in electric vehicles On Board Charger.
E. Battery Bank
A battery bank is the joining two or more batteries together for a single source. The parameters battery are voltage, or the Capacity (AH / Wh), or both.
F. Block Diagram
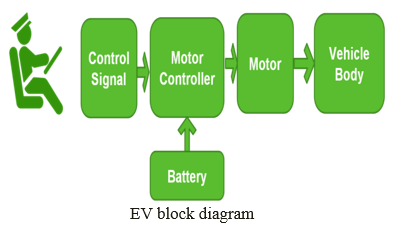
Above diagram shows the block diagram of an EV. It contains five blocks, the control signal block will gives the signal to the motor controller and also this controller connected to the battery to get the supply. The output of the controller is connected to the motor so the motor will drives the Electric Vehicle through the transmission rod
G. Power Required Move Vehicle
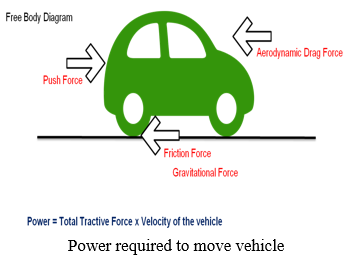
IV. FORCES ON THE VEHICLE
Total Tractive Force
- Rolling Resistance Force (Frr)
- Aerodynamic drag force (Faero)
- Hill climbing Force (Fhc)
- Acceleration Force (Fxi)
A. Linear Acceleration Force
B. Angular acceleration force
- Rolling Resistance Force
The forces that act on the motion of a vehicle The Coefficient, is functions of the Tire, structure, temperature, pressure, and tread geometry, road roughness, material, presence & absence of liquids on the road.
a. This value varies with SPEED.
b. Tire pressure increases its value decreases
Frr = µrr m.g
- µrr - Rolling Resistance Constant
- m - Mass of the Vehicle
- g - Gravitational acceleration constant
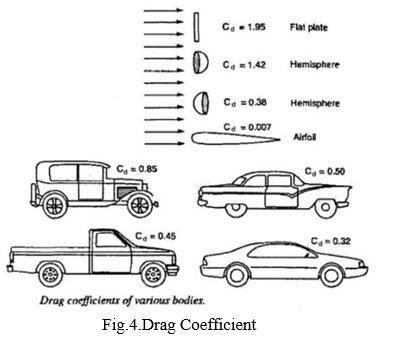
2. Aerodynamic Drag Force
The force of an object that limits its motion through a air is called drag. Drag is a force that effects parallel to and in the same direction as the airflow. Aerodynamic drag increases with the square of speed.
Fad = ½ ρ Cd A v2 Newtons
ρ – Air Density kg/m3
A – Frontal Area m2
Cd – Drag Coefficient
v - Velocity of the Vehicle m/s
Drag Coefficient Cd (0.3 - 0.7)
Drag is a force that acts parallel to and in the same direction as the airflow. Aerodynamic drag increases with the square of speed.
Trucks Road Trains- 0.8 - 1.5
Buses -0.6 - 0.7
Modified Buses-0.3 - 0.4
Motorcycles 0.6 - 0.7
3. Hill Climbing Force
Rise / Run
Fhc = m.g.Sin θ
= 5’ Rise /25’ Run * 100
= 20% Safe Design
Total Power Required
Total Power P = Fte . v
Fte Total Tractive Power = Frr + Fad + Fhc + Fla + Fwa
Rolling Resistance Force Frr = µrr m.g
µrr - Rolling Resistance Constant
m - Mass of the Vehicle
g - Gravitational acceleration constant
Aerodynamic Drag Force
Fad = ½ ρ Cd A v2 Newton
ρ – Air Density kg/m3
A – Frontal Area m2
Cd – Drag Coefficient
v - Velocity of the Vehicle m/s
Hill Climbing Force Fhc = m.g.Sin θ
Frr - Rolling Resistance Force
Fad – Aerodynamic Drag Force
Fhc - Hill Climbing Force
Fla - Linear Acceleration Force
Fwa - Angular Acceleration Force
4. Linear Acceleration Force (Fla) =m.a
Angular Acceleration Force
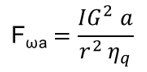
I=moment of inertia
G=gear ratio
a = acceleration
r = radius of tire
nq =efficiency of gear
V. HOW FAST CAN VEHICLE REACH THE TOP SPEED
A. Limiting Factors I
- Weight of Vehicle
- Motor Power of Vehicle
B. Limiting Factors II
- The Drive wheels will spin on the ground if, tractive effort greater then adhesive capability between tire and ground
- Significant Slipping on the wet ground, ice, snow covered or smooth soil.
- Irrespective of the maximum torque power train can apply on wheel
- Slip S (Tire) = (1 – V/rω) * 100% for running
- Slip S (Tire) = (1 – rω/V) * 100% For Breaking
- V is Translatory Speed of Tire midpoint, w Angular speed of tire,
- r is the Rolling radius of the tire
IV. APPLICATION OF POWER ELECTRONICS CONVERTERS IN ELECTRIC VEHICLE
- Bidirectional Converter Topologies for Plug-In Electric Vehicles
- Bidirectional Battery Charger for an Electric Vehicle
- Bidirectional DC–DC Converter for Ultra-Capacitor Applications
- Integrated Bidirectional Converters for Plug-In HEV Applications
- Direct Conversion of an AC–DC Converter for Plug-In Hybrid Vehicles
- Resonant Converter for a Bidirectional EV Charger
- Isolated Bidirectional AC–DC Converter for a DC Distribution System
- Bidirectional T-Type Converter Topology for EV Applications
- Multilevel Two-Quadrant Converter for Regenerative Braking
- Multiphase Integrated On-board Charger for Electric Vehicles
- Split Converter-Fed Induction Motor/BLDC/SRM Drive for Flexible Charging in EV and HEV Applications
- Wireless Topology for EV Battery Charging
VII. MOTORS FOR EV APPLICATION
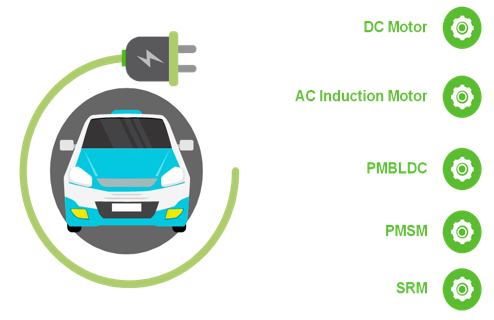
Factors to choose Electric Motors for EV
- Electric Vehicle characteristics
- Driving Wheels
- Vehicle features
- Maximal speed Electric Vehicle
- Maximal torque Motors
- Maximal power Motors
- Battery Capacity
- Battery Voltage
- Gearbox or direct-drive
- Cost Electric Vehicle
VIII. PURPOSE OF CONTROLLER
- Starting for electric motor
- Stopping for electric motor
- Reversing the rotation of motor
- Running the motor
- Speed Control for motor
- Safety of Operator of motor
- Protection from Damage
A. Different Motor Controller
- Motor Starters
- Reduced Voltage controller
- Adjustable Drives
- Integrated Controllers
- Servo Controllers
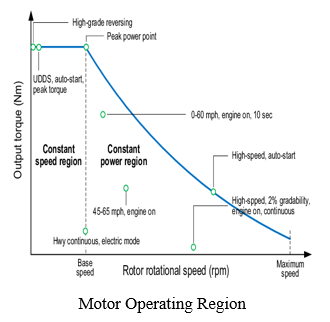
B. Motor Operating Region
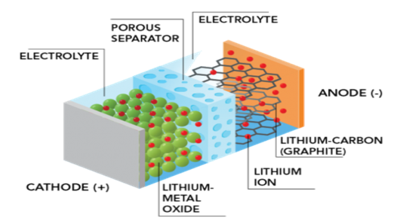
IX. TYPES OF BATTERIES FOR EV APPLICATIONS
- Lithium-ion
- Lithium Phosphate
- Nickel-metal batteries
Lead-acid batteries
A. Battery Parameters
- Battery State of Charge (SoC)
- Depth of Discharge
- State of Health
- C - Rate
- Terminal Voltage
- Open Circuit Voltage
- Internal Resistance
- Life Cycle
B. Battery SoC:
The total energy or battery capacity that has been used over the total available from of the battery. Shows the remaining capacity of the battery while in use.
C. DoD
% capacity of the Battery which has been discharged relative to the overall ideal capacity of the battery.
Note: The Bat should never get full charge or discharge. 20% discharge is the minimum level. 100% Charge.
D. State of Health
Measurement of a battery ability to store and deliver electrical energy
E. Battery Calculations (Example)
|
Vehicle Details |
Value |
Units |
|
Weight |
1000 |
Kg |
|
Width |
1.0 |
m |
|
Hieght |
1.5 |
m |
|
Total Power for 40km/Hr |
1,890.530 |
|
Total Power for 50km/Hr |
2,544.010 |
|
Total Power for 100km/Hr |
8,102.110 |
Motor Power : 10KW
Step #1 Current Consumption by Motor
P = V x I
I = 10KW/72V
Current required to run full load by the Motor 139 Amps
Step #2 Watt-Hour Calculation
Assume Running Time 1 Hour
P = 10000 x 1 Watt-Hr
Step #3 Ampere Hour Calculation
The Source must have 20-30% more than the required energy
Assume : 20%
Watt-Hr = 10000 x 1.2 = 12000
Ampere Hr = Watt-Hr/Battery Terminal Voltage
= 12000/72
= 166.67Ah
Battery Rating
72V, 166.67Ah
Note:
Hill climbing and angular forces are not considered
The vehicle will cover 100km and balance 20km’s energy will be available
X. PROTOCOLS FOR EV APPLICATION
- EV subsystem
- Basic Communication system
- Parameters of Communications
- Types of Communication
- Protocols & its Types
- Vehicle Networking
- Protocols for EV Charging Industry
A. Types of Protocols
- Data Link Protocols UART/SPI/IIC/LIN/CAN/Flex-Ray/Ethernet
- Application Protocols
- UDS/J1939/CAN-Open/MOST
- Others
- Bluetooth/Wi-Fi/USB/4G/5G/V2G
XI. COMMUNICATION TECHNOLOGY USED IN EVS
- Wired Technolog
- Wireless Technology
A. Wired Technology
- Local Interconnect Network (LIN)
- 1998 invented by consortium of Automotive Industry (Audi, BMW,Daimler-Chrysler, Volcano,Volvo,Volkswegan & Motorola)
- Standardized Open Source Network
- 2001 – LIN-1.1 , 2003 – LIN-2.
- Inexpensive Network Speed up to 2KBps
- 1 wire system
- Generally used in Body and Comfort Subsystem and further with CAN/LIN Gateway
B. CAN – Controlled Area Network
- 1980s Bosh released CAN Protocol to the world
- ISO 11898 the most used field bus in the European automobile industry.
- 150Kbps
- Broadcast type protocol, 2 wire system Byte flight
- 1996 – BMW
C. Safe-by-Wire
for airbag control Master/slave network mainly used
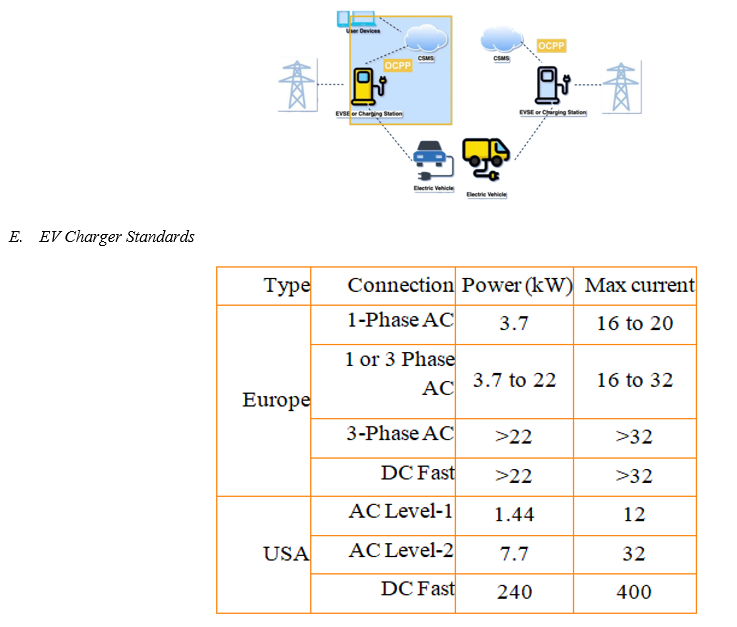
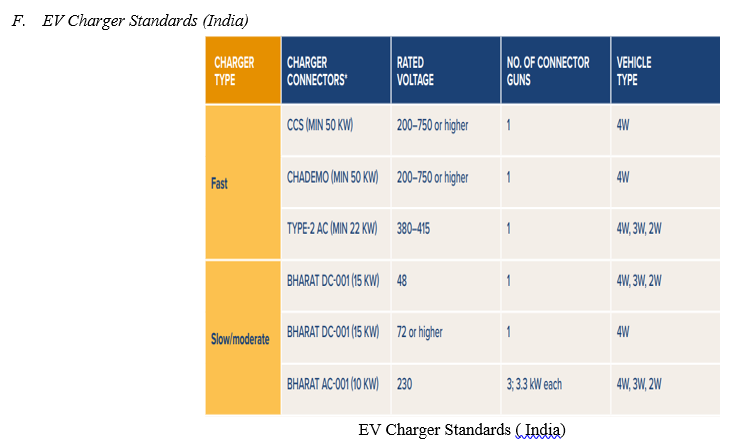
D. Protocols for EV Charging Industry
EV charging industry standards and protocols which deliver the flexibility that is needed for the entire electric vehicle market and will be a key enabler of future EV charging infrastructure developments.
Conclusion
In this paper author discussed about Electrical vehicle, including studies on EV, Components, Power required to move vehicle, Limiting Factors, Application, Types of EV Battery, Protocols for EV Application. and also In this paper author discussed about the motor for EV, types of batteries used for EV, and also discussed about Protocols for EV Charging industries. And finally author will conclude that pure EV has become one of the most attractive solutions for energy saving and emission reduction.
References
[1] https://theicct.org/publication/electric-vehicles-literature-review-of-technology-costs-and-carbon-emissions/ [2] PLUG-IN ELECTRIC VEHICLES: LITERATURE REVIEW by Monica Ralston Center for Climate and Energy Solutions Nick Nitro Center for Climate and Energy Solutions July 2011 [3] Motor Torque Calculations For Electric Vehiclehttps://www.ijstr.org/final print/aug2015/Motor-Torque-Calculations-For-Electric-Vehicle.pdf [4] https://www.pantechelearning.com/lp-profile/ [5] Dr N J S Gorst, Dr S J Williamson, Eur Ing P F Pallett and Professor L A Clark, “Friction In Temporary Works”, Technical Report 071, School of Engineering, University of Birmingham, Birmingham, 2003. [6] A. Dommenech, T. Domenech and J. Cerbiran, “Introduction To The Study Of Rolling Friction”, American Association of Physics Teachers, Am. J. Phys. 55(3), March 1987.
Copyright
Copyright © 2022 Vishwanath Chalawadi, Sanjeeth P. Amminabhavi. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41667
Publish Date : 2022-04-20
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online