

Ijraset Journal For Research in Applied Science and Engineering Technology
Enhancement of Potholes Detection using SSD Algorithm
Authors: Anamika Goel, Bibhas Chandra Gupta, Adesh Singh, Aman Mishra, Akshay Kumar
DOI Link: https://doi.org/10.22214/ijraset.2023.49556
Certificate: View Certificate
Abstract
The development of self-driving cars has always been an extensive research field for the automotive sector. To make a efficient self-driving car, many challenges need to be resolved. Detection of road condition is one of them. This research paper focuses on a particular part-detection of potholes using a camera and analyzing the video feed with the help of artificial intelligence. To solve this problem a popular and weightless algorithm, SSD (Single Shot Multibox Detector) is used.
Introduction
I. INTRODUCTION
Millions of dollars are spent on maintaining and repairing potholes by municipalities around the world. A pothole is a small depression in a road's surface, caused by activities such as weather, traffic, and other variables. There are significant issues with the transportation system. These problems, even though they appear to be less significant as an individual issues add up to big issues when combined in a cumulative, collective, and in a broad sense. The issues that these potholes created result in low fuel economy, accidents, traffic jams etc., which have an adverse impact on the economy of a country and day to day citizens' lives. The number of reported accidents is exponential increasing due to poor road conditions. Roads degrade with increased use and lesser maintenance. Due to the poor road conditions, difficult for drivers to judge road conditions. It is hazardous to travel by road without any warning sign, especially at the night. Maintenance is required to avoid such accidents, system is required which will detect the potholes, bumps, etc. on the road surface before it is encountered so that the driver gets enough reaction time. We need to develop a system for that will detect the defects on the road. The main motivation behind potholes detection method is to aid drivers in various aspects and thus assist them in avoiding a possible accident. All these reasons increase the need to obtain information of such bad road conditions and their remedy. The system automatically recognizes such holes and fills them in order to maintain the road condition. Potholes are depressions rather than growth.
II. METHODOLOGY
A. Applied Object Detection
The object recognition process worked under different variations of input data pose, occlusion, viewing angle, and lighting conditions. The pipeline object detection model can be divided into three parts: informative region selection, feature extraction, and classification. A pipelined object detection model can be divided into three parts: information region selection, feature extraction, and classification. Use Informative Region Selection to change the size, aspect ratio, or specific location of objects that may be present in the image. Therefore, we scan the entire image using a multiscale sliding window. Its computation is considered expensive because there are unlimited redundant candidate windows. On the other hand, applying only a certain number of sliding window templates can detect underperforming regions. Feature extraction requires robust, four semantic representations to extract visual features in order to recognize different objects.
B. Single Shot Multibox Detector (SSD)
SSD is an object detection model. Published by Google researchers in 2016. It uses a single deep neural network that combines feature extraction and region suggestion.
C. Datasets
It consists of different datasets of pothole images.
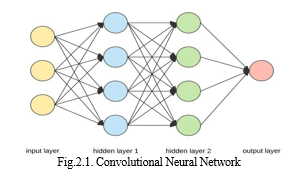
D. CNN?
The concept of CNN is that neurons in one layer only connect to neurons in adjacent layers and not to neurons in the next layer. The number of neurons required to process the entire complex problem is very large, and this is known as overfitting. Previously, all hidden layers were associated with individual nodes. CNNs are like other neural networks, but with learnable weights and fundamentals. So, each neuron receives multiple inputs, takes their weighted sum, goes through an activation function, and finally responds with an output.
III. LITERATURE REVIEW
More than 9,300 people have been killed and nearly 25,000 injured in road pothole-related road accidents in India. This is a serious concern given that pothole accidents are on the rise, far outstripping terrorist attacks. It is unacceptable that many people die because of road potholes. Constant detection and timely repair can not only ensure road surface quality but also save many lives. Many proposals are collected from standard journals and first chronologically checked to find contributions to pothole and bump detection technology.
After review, various issues in road maintenance are discussed. We describe and review different approaches used in pothole detection. To identify road potholes, the following approach is recommended: A vibration-based approach to automatically detect potholes with coordinates, a stereo vision system to detect potholes while driving, and an IoT-based road monitoring system (IoT-RMS). in the street. As a result of the research, case studies are included and reviewed. The development of self-driving cars has always been an extensive research field for the automobile industry. To make a capable self-driving car, many challenges need to be resolved. Detection of the road condition is one of them.
The project focuses on a particular part-detection of potholes using a camera and analyzing the Video feed with the help of artificial intelligence. To solve this problem a popular and lightweight algorithm, SSD (Single Shot Multi box Detector) is used. Fast single shot multibox detector and its application on vehicle counting system. The technology of intelligent transportation system (ITS) application has been developed rapidly Pothole Detection under Diverse Conditions using Object Detection Models. This project proposes a pothole detection method to detect and localize potholes on road surface. They have described the development of a Faster RCNN modelfor pothole detection which is trained on a public potholes data set. They compare the result of a self- built CNN model with pre-trained CNN models, with the pre-trained model achieving an overall detection accuracy of 97.8%. Pothole Classification Model Using Edge Detection in Road Image. In this project, we propose a pothole classification model using edge detection in road image.
The proposed method converts RGB (red, green and blue) image data, including potholes and other objects, to gray-scale to reduce the amount of computation. It detects all objects except potholes using an object detection algorithm. The detected object is removed, and a pixel value of 255 is assigned to process it as a background. In addition, to extract the characteristics of a pothole, the contour of the pothole is extracted through edge detection.
Finally, potholes are detected and classified based by the (you only look once) YOLO algorithm. Coupled Object Detection and Tracking from Static Cameras and Moving Vehicles. In this paper, they have presented a novel approach for multi object tracking that couples object detection and trajectory estimation in a combinedmodel selection framework. Their approach does not rely on a Markov assumption, but can integrate information over long time periods to revise its decision and recover from mistakes in the light of new evidence. As their approach is based on continuous detection, it can operate with both static and movingcameras and cope with large-scale background changes.
IV. MODELING AND ANALYSIS
Looking at various methods of object detection these days, convolutional neural networks are used to improve the speed and accuracy of detection. Among numerous computer vision object detection methods, single-shot multibox detectors are fast and powerful compared to other models. This is because the SSD model's algorithm uses multiple convolutional layers to detect objects. The concept behind a single-shot multibox detector, a feedforward convolutional neural network, helps us obtain multiple fixed-size bounding boxes. Then an object class instance is searched with the given input to get the final unsuppressed maximized output, thus removing the extra anchor boxes. Various auxiliary layers and additional prediction layers are convolved.
- To predict different aspect ratios and scales per layer, we reduce the size of additional convolutional layers to improve the accuracy of the prediction model.
- CNN generates multiple feature maps by extracting the most relevant features from the input image using many kernels or feature detection layers (sharp kernel, edge detection kernel, blur kernel, etc.).
- The extracted feature map layer is associated with a bounding box that helps locate objects within a given input. These are the actual SSD layers, also called SSD heads.
Conclusion
Object detection using SSD algorithms is the main one and has been successfully achieved. The SSD algorithm is the most advanced algorithm in computer vision for object detection. The concepts used in CNN make it fast compared to other algorithms used for object detection. The SSD model not only recognizes it, it helps you find the object. After training a dataset, you can expect to get the best possible results.
References
[1] “What Is a Convolutional Neural Network? A Beginner’s Tutorial for Machine Learning and Deep Learning.” freeCodeCamp.org, 4 Feb. 2022, [2] Cao, Jingwei, et al. “Front Vehicle Detection Algorithm for Smart Car Based on Improved SSD Model.” MDPI, 18 Aug. 2022 [3] Ansari, Sam. “Building a Realtime Pothole Detection System Using Machine Learning and Computer Vision.” Medium, 16 Mar. 2022, towardsdatascience.com/building-a-realtime-pothole-detection-system-using-machine- learning-and-computer-vision-2e5fb2e5e746. [4] D. Kavitha and S. Ravikumar, \"Designing an IoT based autonomous vehicle meant for detecting speed bumps and lanes on roads\", J. Ambient Intell. Humaniz. Comput, pp. 1-10, Jul. 2020 [5] Liu, W., Anguelov, D., Erhan, D., et al.: ‘SSD: Single Shot MultiBox Detector’. European Conf. on Computer Vision, Amsterdam, Holland, 2016, pp. 21–37 [6] Zhang Z, Lyons M, Schuster M, et al. “Comparison between geometry-based and Gabor-wavelets-based facial expression recognition using multi-layer perceptron”. IEEE, 1998, pp. 454-459. [7] Buza, E.; Omanovic, S.; Huseinnovic, A. Pothole detection with image processing and spectral clustering. In Proceedings of the 2nd International Conference on Information Technology and Computer Networks, Antalya, Turkey, 8–10 October 2013; pp. 48–53. [8] W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C.-Y. Fu, A. C. Berg. SSD: Single Shot MultiBox Detector. Proceedings of the 2016 European Conference on Computer Vision 2016; 21-37 [9] Fan, R.; Orgunalp, U.; Hosking, B.; Liu, I. Pothole Detection Based on Disparity Transformation and Road Surface Modeling. IEEE Transactions on Image Processing. 2019, 897-908 [10] Bansal, K., Mittal, K., Ahuja, G., Singh, A., and Gill, S. S. (2020). Deepbus: Machine learning based real time pothole detection system for smart transportation using iot. Internet Technology Letters, 3(3):e156 [11] Wu, H.; Wu, D.; Zhao, J. An intelligent fire detection approach through cameras based on computer vision methods. Process Saf. Environ. Protect. 2019, 127, 245–256. [12] J. Berclaz, F. Fleuret, and P. Fua. Robust people tracking with global trajectory optimization. In CVPR’06, pages 744–750 [13] Assidiq, A. A., Khalifa, O. O., Islam, M. R., & Khan, S. (2008, May). Real time lane detection for autonomous vehicles. In 2008 International Conference on Computer and Communication Engineering (pp. 82-88). IEEE.
Copyright
Copyright © 2023 Anamika Goel, Bibhas Chandra Gupta, Adesh Singh, Aman Mishra, Akshay Kumar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET49556
Publish Date : 2023-03-14
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online