

Ijraset Journal For Research in Applied Science and Engineering Technology
Farmer Friendly Agriculture Robot with Shovel Control System Using Automatic Seed Dispensing
Authors: Shubham Kosare, Priyanka Dahane, Mayuri Korke, Pallavi Gajhbhiye, Khushboo Kanhekar, Sawan Korde, Prof. Sneha Tibude
DOI Link: https://doi.org/10.22214/ijraset.2022.43164
Certificate: View Certificate
Abstract
An agricultural mechanism or agri mechanism could be a mechanism deployed for agricultural functions. The most space of application of robots in agriculture is seeding robots square measure designed to exchange human labor. The agricultural business is behind alternative complementary industries in victimization robots as a result of the kind of jobs concerned in agriculture are not any and dig. This project strives to develop a mechanism capable of activity operations like automatic seeding and dig. It additionally provides manual management once needed and keeps tabs on the wetness with the assistance of wetness sensors Then main part here is that the microcontroller that supervises the whole method.
Introduction
I. INTRODUCTION
Farmers nowadays pay plenty of cash on machines that facilitate them decrease labor work and increase yield of crops. There square measure numerous machines that square measure offered for tilling, harvesting, spraying pesticides etc., but these machines ought to be operated by hand to perform the specified operations and furthermore separate machines square measure used for each functions. The yield and profit returns from using this instrumentation square measure terribly less as compared to the investment. Another issue is that the growing demands of the world’s population. the planet Health Organization estimates that Earth’s population can bit nine billion in thirty five years which can cause a staggering demand in increase of growth of food crops. Automation is that the ideal resolution to beat all the on top of mentioned shortcomings by making machines that perform quite one operation and automating those operations to extend yield on an outsized scale. As one of the trends of development on automation and intelligence of agricultural machinery within the twenty first century, all types of agricultural robots are researched and developed to implement variety of agricultural production in several countries, like choosing, harvesting, weeding, pruning, planting, grafting, agricultural classification, etc. and that they step by step seem benefits in agricultural production to extend productivity. Autonomous agricultural robots square measure an alternate to the tractors found on fields nowadays. A cultivation task like seeding, spraying, fertilizing and gather is also performed by fleets of autonomous agricultural robots within the future. freelance of the particular style a heavy agricultural mechanism are a posh and big-ticket vehicle – the challenge is thus to prove that it's competitive to ancient technology and will even bring a decisive lead.
II. OBJECTIVES
- To Design and develop an agricultural robot which can be able to digging and seeds like operations carried out in agricultural field.
- To control of this agri-robot should be wireless and can be able to show above operations.
- Design and analyze a real time system for this robot to give a solution and propose a model which can be used in real time field.
- Analyze the design of digging tool and develop for real time system.
- To propose a low cost but effective real time agri-robot system.
A. Objective of Project
- To avoid the farmer being exposed to toxic pesticide vapours produced during spraying.
- Reduce the workload on the farmer.
III. LITERATURE SURVEY
As a source of livelihood, agriculture (including forestry and fishing) remains the largest sector of Indian Economy. While its output share fell from 28.3% in 1993-94 to 14.4% in 2011- 12, employment share declined from 64.8% to 48.9% over the same period. Therefore, almost half of the workforce in India still remains dependent on agriculture. Given the low share of this workforce in the GDP, on average, it earns much lower income poorer than its counterpart in industry and services.
Therefore, progress in agriculture has a bearing on the fate of the largest proportion of the low income population in India. The paper identifies five important aspects of agriculture that need immediate attention to bring economic advantages to millions of farm families. First, output per hectare, which is a common measure of agricultural productivity, remains low for many crops when compared to many other countries. There are also large regional variations within the country. Reasons include low and faulty input uses, poor access to modern technology and no real technological breakthrough in recent times. Second, on average, farmers do not realize remunerative prices due to limited reach of the minimum support prices (MSP) and an agricultural marketing system that delivers only a small fraction of the final price to the actual farmer. Third, the farm size of the majority of the household has declined to unviable levels inducing farmers to leave land and look for better job opportunities elsewhere. Because land leasing laws make it risky to lease land, increasingly, productive land is being left uncultivated. Changes in the land leasing laws may bring consolidation of land holding at operational level and attract better investment along with access to credit and relief to tenants. Fourth, relief measures in the event of natural disasters are inadequate and suffer from procedural inefficiencies and delays. The risk adaptation measures are poorly executed and have not worked effectively.
This situation needs to be rectified with at least minimum quick relief to farmers for crop loss in case of natural calamities. Finally the potential of the eastern region needs to be harnessed with suitable interventions. This region is unique for its suitability to the production of certain commodities. However, taking advantage of this potential would require institutional support and investment in technological innovations. The paper offers ideas on how these problems can be addressed so as to accelerate agricultural growth and bring remunerative prices to farmers
IV. METHODOLOGY
To make agriculture project we follow this steps
- Step 1: To go to the farmers and findthe problems faced by them.
- Step 2: To choose a problem..
- Step 3: Toanalyse the problem their solution.
- Step 4: The selection of design of gear for proper seed distance.
- Step 5: Find which mechanism is to suitable in lowest cost.
- Step 6: To find all components we require in proper dimension.
a. Motor Driver: A gear reducer, also called a speed reducer or gear box, consists of a set of gears, shafts and bearings that are factory-mounted in an enclosed, lubricated housing. Gear reducers are available in a broad range of sizes, capacities and speed ratios. Their job is to convert the input provided by a “prime mover” into output of lower RPM and correspondingly higher torque. In industry, the prime mover is most often an electric motor, though internal combustion engines or hydraulic motors may also be used There are many types of gear reducers using various gear types to meet application requirements as diverse as low first cost, extended life, limited envelope size, quietness, maximum operating efficiency, and a host of other factors. The discussion that follows is intended only as a briefoutline of the most common industrial gea reducer types, their characteristics and uses.

b. Power Supply: For our all IC we require 5V D.C. supply which can be generated by step downtransformer, full wave bridge rectifier, filter condenser & voltage regulator IC7805. The powersupply is mainly used to give the regulated 5V output to all the components. But due to interference between ground and output there is glitch in the output. So we have used capacitor to decouple them and hence the power supply gives the 5V regulated output. Current and battery discharge time with and no load. Table 1 shows Current consumed by DC motor and ARM7 controller, servo motor and Relay from that we can calculate the discharging time for battery with load and without load. Formula to calculate to time for no load is, Discharge Time = mAH current of battery / Total current consumed by circuit in mA. The input to the circuit is applied from the regulated power supply. The a.c. input i.e., 230V from the mains supply is step down by the transformer to 12V and is fed to a rectifier. The output obtained from the rectifier is a pulsating d.c voltage. So in order to get a pure d.c voltage, the output voltage from the rectifier is fed to a filter to remove any a.c components present even after rectification. Now, this voltage is given to a voltage regulator to obtain a pure constantdc voltage.
c. Transformer: Usually, DC voltages are required to operate various electronic equipment and these voltages are 5V,9V or 12V. But these voltages cannot be obtained directly. Thus the a.c input available at the mains supply i.e., 230V is to be brought down to the required voltage level. This is done by a transformer. Thus, a step down transformer is employed to decrease the voltage to a required level.
d. Seed Sowing /weeding Motor: This motor is use as a time interruption purpose because one by one side wills down to earth side and vehicle move forward direction at same time. Knowing the position and severity of the weeds there are many methods that can kill, remove or retard these unwanted plants .Different physical methods can be used that rely on physical interaction with the weeds. A classic example is to break the soil and root interface by tillage and promote wilting of the weed plants. This can be achieved in the inter row area easily by using classical spring or duck foot tines. Intra row weeding is more difficult as it requires the position of the crop plant to be known so that the end effectors can be steered away. Within the close-to-crop area, tillage cannot be used as any disturbance to the soil is likely to damage the interface between the crop and the soil.
e. PIC Microcontroller: A microcontroller is a small computer on a single integrated circuit consisting internally of a relatively simple CPU, clock, timers, I/O ports, and memory. Microcontrollers are used in automatically controlled products and devices. Microcontrollers are designed for small or dedicated applications. By reducing the size and cost compared to a design that uses a separate microprocessor, memory, and input/output devices, microcontrollers make it economical to digitally control even more devices and processes. The pulses coming as output from electricity meters on each increase in unit are applied to the microcontroller as input. Microcontroller reads the inputs & as soon as input pulse is received, it increases the count of units of electricity. Also, it reduces the unit prize amount from the balance amount. The count of units and the balance amount is displayed on LCD display. The updated values are now stored in EPROM.

f. HC-05MODULE: HC-05 module is an easy to use Bluetooth SPP (Serial Port Protocol) module, designed fortransparent wireless serial connection setup. Serial port Bluetooth module is fully qualified Bluetooth V2.0+EDR (Enhanced Data Rate) 3Mbps Modulation with complete 2.4GHz radio transceiver and baseband. It uses CSR Blue core 04-External single chip Bluetooth system with CMOS technology and with AFH(Adaptive Frequency Hopping Feature). It has the footprint as small as 12.7mmx27mm. Hope it will simplify your overall design/development cycle.
Fig.9 HC-05 Module
Specifications
- Typical -80dBm sensitivity
- Up to +4dBm RF transmit power
- Low Power 1.8V Operation ,1.8 to 3.6V I/O
- PIO control
- UART interface with programmable baud rate
- With integrated antenna
- With edge connector
g. LCD: LCD's are very simple to interface with the controller as well as are cost effective. The LCD requires 3 control lines (RS, R/W & EN) & 8 (or 4) data lines. The number on data lines depends on the mode of operation. If operated in 8-bit morethan 8 data lines + 3 control lines i.e. total 11 lines are required. And if operated in 4-bit morethan 4 data lines + 3 control lines i.e. 7 lines are required. How do we decide which mode to use? It’s simple if you have sufficient data lines you can go for 8 bit mode & if there is a time constrain i.e. display should be faster than we have to use 8-bit mode because basically 4-bit mode twice as more time as compared to 8-bit mode.
h. Battery: Batteries store energy being produced by given generating source and when this source is unavailable this energy can be used by loads. The inclusion of storage in any energy generating system will increase the availability of the energy. Battery (electricity), an array of electrochemical cells for electricity storage, either individually linked or individually linked and housed in a single unit. An electrical battery is a combination of one or more electrochemical cells, used to convert stored chemical energy into electrical energy.
V. ADVANTAGES
- Row to row spacing can be adjusted.
- Required seed spacing can be achieved.
- Less manpower is required.
- Variety of seed can be sown by this machine.
- As compared to traditional sowing methods time required is less.
- Seed flow can be controlled.
VI. APPLICATIONS
- It uses in many agricultural application
- Remote monitoring
- Communication system
???????VII. FUTURE SCOPE
- In this project we use Bluetooth module which is used for short distance communication.
- So in future we can use GSM module in place of RF module which can be used for long distance.
VIII. RESULTS AND DISCUSSION
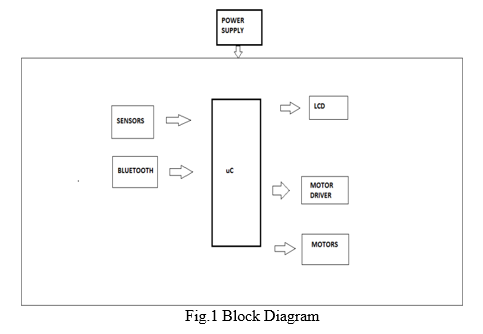
As per the circuit diagram shown, the circuit for Agricultural Robot Using Bluetooth was implemented successfully. The circuit has different sections, such as moisture measurement, temperature measurement, microcontroller, Bluetooth, DC motors and power supply.
 ???????
???????
Conclusion
The main task nowis to promote this technology and have available to farmers at an affordable price. Newly developed system is also effective as compared systems available in the market. New trans-planter having simple construction and less number of parts which minimizes the cost of development for it. Total cost required to develop the system is also less. New spraying machine is more flexible than machines available in the market at starting cost. This is our first step in making all the process involved in agriculture automatic.
References
[1] Vitzrabin, E., and Y. Edan. \\\"Changing task objectives for improved sweet pepper detection for robotic harvesting.\\\"IEEE Robotics and Automation Letters 1.1 (2016): 578-584. [2] H.Pota,R.Eaton,J.Katupitiya,S.D.Pathirana, “Agricultural Robotics: A Streamlined Approach to Realization of Autonomous Farming”, Second International Conference on Industrial and Information Systems, ICIIS 2007, 8 – 11 August 2007 [3] Xue Jinlin, XU Liming, “Autonomous Agriculture Robot and its row guidance”, IEEE, International Conference on Measuring Technology, 2010, published [4] W. C. Bac, J. E. Henten, J. Hemming, and Y. Edan, “Harvesting Robots for High-Value Crops: State-ofthe-Art Review and Challenges Ahead”. Journal of Field Robotics 2014, 31(6): 888– 911. [5] Akash Raj N, Balaji Srinivasan, Deepit Abhishek D, Sarath Jeyavanth J, Vinith Kannan A, “IoT based Agro Automation System using Machine Learning Algorithms”, International Journal of Innovative Research in Science,Engineering and Technology Vol. 5, Issue 11, November 2016. [6] WWW.howstuffworks.com [7] WWW.electrikindia.com [8] WWW.google.com
Copyright
Copyright © 2022 Shubham Kosare, Priyanka Dahane, Mayuri Korke, Pallavi Gajhbhiye, Khushboo Kanhekar, Sawan Korde, Prof. Sneha Tibude. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43164
Publish Date : 2022-05-23
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online