

Ijraset Journal For Research in Applied Science and Engineering Technology
Fire Sense
Authors: Suryansh Pratap Singh, Tapan Chitransh, Prof. Amit Kumar Tiwari
DOI Link: https://doi.org/10.22214/ijraset.2022.42188
Certificate: View Certificate
Abstract
The significance of putting out a fire as soon as possible can serve to warn others about the perils of disaster and death. Common sensor fire detection systems are limited, especially in a vast location, requiring a long time to detect a fire, and are unable to work in an open environment. This study developed a fire sense approach based on visual sensitivity and colourful variables such as colour, earth filling, light, backdrop, and fire detection time to assess the likelihood of a fire. The degree of error of fire detection was calculated in this study’s test.
Introduction
I. INTRODUCTION
Fire is a source of energy that has the potential to harm both the economy and the environment. According to Indonesian National Dicastery Monitoring data, at least 55 fire broke out in Jakarta area of Indonesia in 2012, destroying 394 residences and displacing 1271 people. Proactive fire sense can assist provide disaster warnings and save large economic losses as well as human fatality. Many classic methods of initial fire detection have been used, such as sampling particles, determining temperature and relative humidity, and analyzing smoke with ultraviolet and infrared devices. The traditional approach, on the other hand, takes a large amount of time to detect a fire in a very large space and cannot be used in an open location. A fire sense, in most cases, is unable to provide more data about the fire's location, size, or progression. Common sensors can occasionally provide a high level of error detection (false alarm). In most circumstances, where the traditional method fails, visual detection can be employed as a fire detection solution. Surveillance cameras have been installed in numerous buildings, and they are now being deployed for object tracking, exceptional event detection, and ammunition. Fire sense based on visual camera monitoring may also be utilized as a field study in the field of computer visions, which is beneficial in fire risk management. Using an existing camera and then splitting the recorded pictures of each frame, visual fire detection research may be conducted. Coloured pictures have been the focus of previous research on fire detection analyses. According to the data, no research has employed HSV as Multiple Colour Features in conjunction with Background Removal to create a Fire Segment section. Then, utilizing morphological selection and production time, the partition region will be smooth out and provide a tiny mistake in the fire detection area.
II. PROPOSED METHODOLOGY
A. Background Removal
For identifying components in a picture, background removal is a typical process. The concept behind this approach is to determine the condition that seems to be the model's backdrop, and then compare the photographs to the model's back where CORE Metadata, quotes, and other similar materials may be found. Udinus Repo provided previously obtained for object availability, also known as pre-existing. This approach is frequently used on two pictures taken in the same area at different times to detect the existence of an object. The rear models were discovered in a location that was both stable and adaptive to changes in the environment. The formula may be used to determine the pre-acquisition phase.
R (x, y) = Img (x, y) -Bg (x, y)
When R is the result of Back Output, Img is the image that will be studied to find the object or modified shape, and Bg is the background image, Img is the image that will be examined to determine the object or changed shape. The comparisons are done in the same pixel region (x, y). Because this approach must be able to accept any local changes, it necessitates a pixel change tolerance threshold or limit. R is a pixel that is both flexible and intolerable.
B. HSV
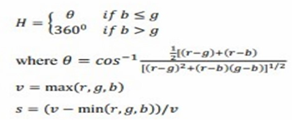
HSV is a three-dimensional colour system that includes Hue (green), Saturation (dark green), and Value (red) (light\intensity). Using cylindrical coordinates as a basis, the Color space has been created. In terms of reflecting human vision and describing colour sensations, the HSV colour space is superior than the RGB. The HSV colour space has a colour range of 0 to 1, which may be created by applying the nonlinear transformation formula to convert RGB to HSV.
III. MODELLING AND ANALYSIS
A. Video Extraction
The video we examined was taken from previous studies. We selected AVI, FLV, and MP4 as typical video dataset formats.
B. Frames
All video datasets will be extracted into picture frames during this phase. The number of frames extracted every second will be in the range of 24 to 30. Following this step, each picture will be analyzed to provide a feature based on colour segmentation and frame movement
C. Email and Alarm
We utilized the "Smtp" and "playsound" python packages for email and alarm systems, respectively.
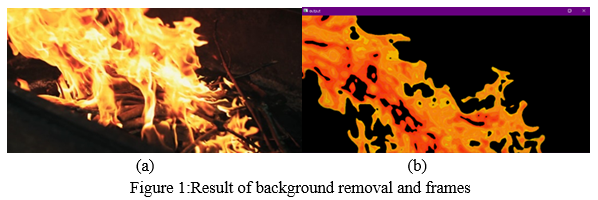
IV. RESULTS AND DISCUSSION
This section explains the findings of our model's performance in detecting fire zones. The performance is quantified using a Lee computation that was used to evaluate the detection method in detecting smoke regions.
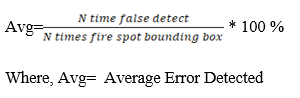
The evaluation algorithm has been changed to calculate the amount of incorrect Fire Spot Bounding Boxes recognised as false detect in random picture frames in order to analyse the performance of fire spots. The equation for calculating the average error rate.
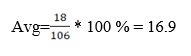
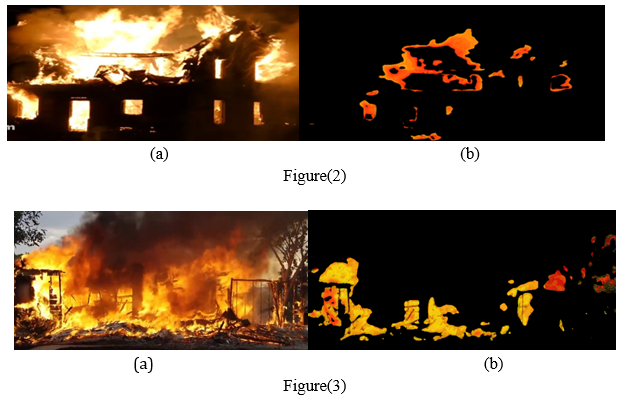
Although multi-color feature segmentation and background removal are capable of detecting fire regions, we still discover false detection areas in numerous data sets. To address this issue, researchers in this work used a mix of morphology and time frame selection to limit false detection. The findings revealed that this method's average error detection performance for detecting fire spots in both indoor and outdoor environments is approximately 16.9.
V. SNAPSHOTS
VI. ACKNOWLEDGMENT
We would like to express our special thanks of gratitude to our professor “Mr. Amit Kumar Tiwari” for their able guidance and support in completing my project. We would also like to extend our gratitude to our friends and family for supporting us in the project journey.
Conclusion
When morphology and time frame selection are done following Multi Colour Feature and Background Subtraction, which has had an influence on the minor error rate, this study has proven effective in fire sense, with an error rate of approximately 16.9% capable of decreasing erroneous detection of fire spots area.
References
[1] A. Enis Cetin, et al, “Video fire detection – review,” Digital Signal Processing, Vol. 23, pp. 1827-1843, 2013. [2] H. Yamagishi and J. Yamaguchi, \"Fire Flame Detection Algorithm Using a Color Camera,\" in International Symposium on Micromechatronics and Human Science, 1999. [3] D. G. Healey,T. Slater,B. Lin,Drda and A. D. Goedeke, \"A System for Real Time Fire Detection,\" in Conference on Computer vision and Pattern Recognition, 1994. [4] B. U. Toreyin, Y. Dedeoglu, U. Gudukbay, and A. Enis Cetin, “Computer vision based method for realtime fire and flame detection,” Pattern Recognition Letters, (27), pp. 49-58, 2007. [5] L. M. Garcia,G. S. Perez,M. Nakano,K. T. Medina,H. P. Meana and L. R. Cardenas, \"An early fire detection algorithm using lP cameras.,\" Sensors (Basel, Switzerland), pp. 12(5),5670-86. doi:1O.3390/s120505670,2012. [6] c. Kao and S. Chang, \"An intelligent real-time tire-detection method based on video processing,\" in TEEE 37th Annual 2003 Tnternational Carnahan Conference onSecurity Technology, 2003 [7] T. Celik,H. Demirel,H. Ozkaramanli and M. Uyguroglu, \"Fire detection using statistical color model in video sequences.,\" Journal of Visual Communication and Tmage Representation, pp. 18(2),176- 185. doi:IO.1016/j.jvcir.2006.12.003,2007. [8] Y. C. L. M. a. A. Mecocci., \"An Intelligent System For Automatic Fire Detection in Forests,\" in 3th Internationa Conference on Image Processing and its Application, 1989.
Copyright
Copyright © 2022 Suryansh Pratap Singh, Tapan Chitransh, Prof. Amit Kumar Tiwari. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42188
Publish Date : 2022-05-03
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online