

Ijraset Journal For Research in Applied Science and Engineering Technology
A Floor Cleaner with Sweeping and Mopping which Operates Autonomously
Authors: Pranay S. Choudhari, Sahil S. Pardhi, Shantanu D. Borkar, Saurabh A. Patil, Ritik R. Bomle, Rohit G. Mene, Kirti M. Dhenge
DOI Link: https://doi.org/10.22214/ijraset.2022.43050
Certificate: View Certificate
Abstract
When complex activities are automated to simplify employment in today\'s environment, the benefits of automation can be leveraged to accomplish simple domestic duties. Cleaning is one such duty that, despite its negative connotation due to the nature of the job, is vital. Cleanliness promotes a healthy way of life. Cleanliness, on the other hand, has been ignored in today\'s fast-paced environment. To address this issue, this study proposes a floor cleaner that is controlled wirelessly using an Arduino Nano microprocessor and a Bluetooth module. The cleaner robot can be self-contained or operated manually by an Android device. The SWEEPING and MOPPING features are used to achieve all-around cleaning.
Introduction
I. INTRODUCTION
In the last few decades, there has been a substantial increase in the usage of robotic gadgets in domestic tasks. One of the most strenuous and time-consuming duties is floor cleaning. And this is where automation enters in the picture, taking over tasks that require physical labour. Increasing levels of pollution, greater consumption of goods, and massive amounts of rubbish have forced a daily rigorous cleaning of our surrounds. Cleaning the floors The greatest feasible technical solution for this is a robot, which makes life easier. Floor cleaners have improved over time. These gadgets, which range from vacuum cleaners alone to autonomous floor cleaners with cleaning and mopping capabilities, come with an app for navigating and controlling them. However, these robots are mostly used for dry or wet cleaning. Our project aims to fill this need by demonstrating a working prototype of a cleaning and mopping robot controlled by an android (through Bluetooth) that might be developed into low-cost robots in the future.
II. LITERATURE SURVEY
Vacuum suction used to perform autonomous motion utilising an IR sensor setup. Both automated and manual operations are possible [1]. It uses sensors to identify obstacles. There were both manual and automated procedures accessible [2]. Obstacle avoidance is accomplished by use of infrared sensors. RF transmitter and receiver for manual control [3]. Collisions are used to detect obstacles, and rectangular zigzagging is used to tidy an area [4]. Only vacuuming is done by the robot. For cleaning the surface, it uses a zigzag pattern. WiFi control is also included with this robot[5].
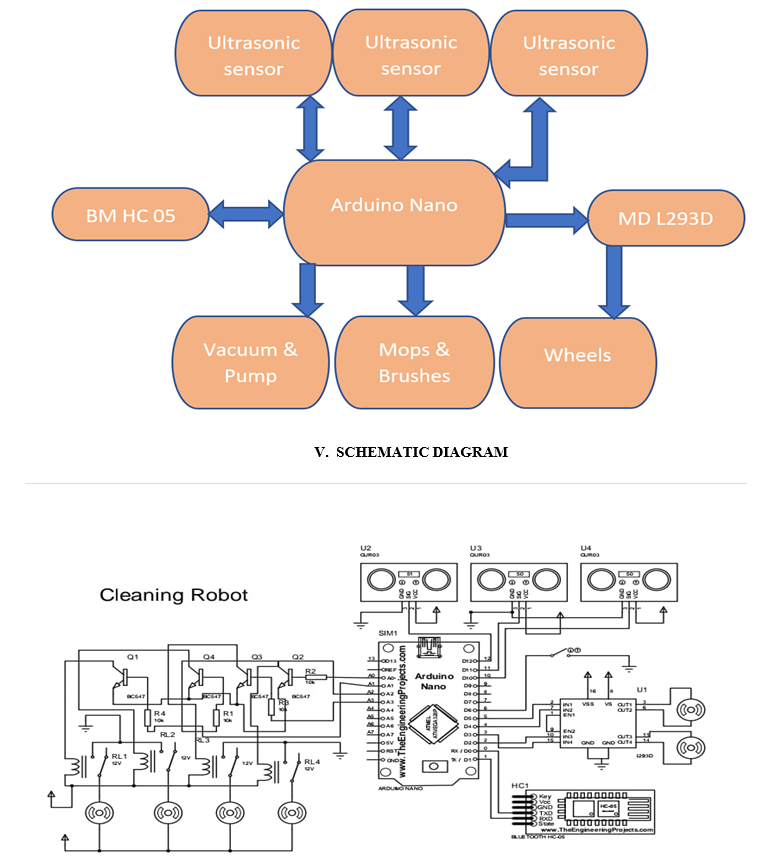
III. COMPONENTS REQUIRED
- Arduino Nano Board
- Relay Module (4 Channel 5V)
- Diodes
- Resistors
- Ultrasonic Sensors
- Bluetooth Module HC 05
- Motor Driver L293D
- Centre Shaft Gear Motors (12V, 30 RPM)
- TT Gear Motors
- Dc Motor
- Centrifugal Fan
- Water Pump
- 12V Lead Acid Battery
- 4V Lead Acid Battery
- Wooden Chassis
IV. BLOCK DIAGRAM
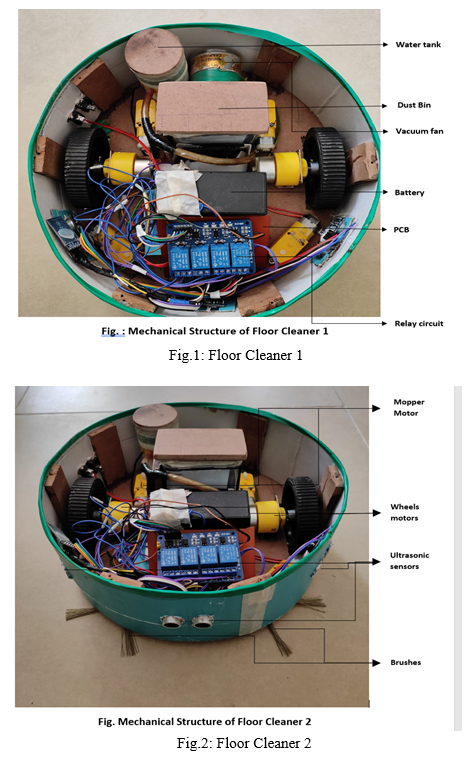
VI. MECHANICAL DESIGN
The robot's chassis is fashioned out of a round wooden plank. The centre shaft geared two motors of 30 rpm for the wheels, four 6V motors for moppers and brushes, the pump water tank, and the vacuum system are all supported by plywood. To cover the robot, a second wooden chassis of the same shape and size is placed on top. It also features a side covering attached to wooden columns that are glued to the horizontal chassis.the 12v dc motor is used in vacuum system.
Brushes and mopper are positioned at the bottom of the wooden chassis on both sides. The geared DC motor allows the operator to control the speed and direction of the bush rotation. The robot's vacuum cleaning system was designed to fit within it. The vacuum box and port that draws air into the container and suctions dirt and dust with the dc fan. To prevent dust from entering the container, a filter is inserted between the air intake and the dc vacuum fan. The debris bin can be removed and the water tank replenished. A tiny wheel is put in front of the cleaning robot for free displacement, and two larger wheels are attached to a 12V dc geared motor on the backside.
VII. ANDROID CONNECT
To control the robot manually, an Android Application called Bluetooth Controller is used to connect it to a bluetooth module called HC 05 that is connected to an Arduino Nano. There are 9 different intructions or we can say buttons on the android interface whoch are forward, reverse, left, right, dry clean, wet clean, all on, stop and all off.
The forward instruction makes the robot move in forward direction, similar operation happens for the reverse, left and right instruction robot moves in reverse, left mand right direction respectively. The dry clean instruction turn on/off the 2 motors of the brushes and vacuum. Wet cleans instruction turn on/off 2 motors of moppers and water pump where all on/off makes these all motors, pump and vacuum on/off. Atlast stop intruction makes the whole robot to stop its working.
Conclusion
This paper presents the development of the floor cleaner with sweeping or we called it as dry cleaning and wet cleaning that is mopping. This robots is based on the Arduino nano microcontroller which based on Atmega 328. It is compact in size as compare to arduino Uno. The whole system is powered by two batteries, 12v lead acid and 4v lead acid battery. The blutooth module interfaced with microcontroller provides android connectivity to the user to operate the robot. It provides the range of 10 metres. The equipements of the system is tested individutally, and then after the prototype is developed. From the results it is noticed that the whole prototype works as expected. In future, this device can be equiped with artificial intelligence to make it compatiable with google assistant or amazon`s alexa. The navigation system can be integrated with it to make it more smarter[6]. The UV rays protection to kill bacteria can be provided[7]. It may develope with solar power rechargable battery[6].
References
[1] “Smart floor cleaning robot”, CLEAR Uman Khalid, Muhammad Faizan Haseeb Haider, Muhammad Usman Sardar, Muhammad Faisal Khan, Abdul Basit Zia, Tahseen Amin Khan Qasuria. [2] “Design and development of floor cleaner robot”, Manreet Kaur, Preeti Abrol. [3] “Automatic floor cleaner” Aishwarya Pardeshi, Shraddha More, Dhanashri Kadam, V.A.Patil. [4] “Development of small floor cleaner for home floor cleaning”, Yong Joo Oh, Yoshida Watanabe. [5] Neato, 'Neato Robotics | Smartest, Most Powerful, Best Robot Vacuum', 2015. [Online]. Available: http://www.neatorobotics.com/. [6] “A smart autonomous floor cleaner with an android based controller”, Anshu Prakash Murdan, Pawan Kumar Ramkissoon, Electrical and Electronics Engineering Dept, University of Mauritius Réduit, Mauritius. [7] “Sweepy - The Smart Floor Cleaner”, Varsha. P.H, Lavanya V, Meghana K, Rohan P S, Sneh R, 2018 International Conference on Design Innovations for 3Cs Compute Communicate Control. [8] “Designing and Optimization of An Autonomous Vacuum Floor Cleaning Robot”, H.A.Shakhawat Hossen Prayash, Md. Ragib Shaharear, Md. Farhanul Islam, Saiful Islam, Noushad Hossain, and Shamik Datta, International Conference on Robotics, Automation, Artificial-intelligence and Internet-of-Things (RAAICON) 29 November – 1 December 2019, Dhaka, Bangladesh.
Copyright
Copyright © 2022 Pranay S. Choudhari, Sahil S. Pardhi, Shantanu D. Borkar, Saurabh A. Patil, Ritik R. Bomle, Rohit G. Mene, Kirti M. Dhenge. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43050
Publish Date : 2022-05-21
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online