

Ijraset Journal For Research in Applied Science and Engineering Technology
A Review Paper on Google Assistance Based Consumer Vacuum Suction Dusting Robot
Authors: Miss. Falak Naaz, Prof. Gayatri Bhoyar , Prof. Amol Dhankar
DOI Link: https://doi.org/10.22214/ijraset.2022.45848
Certificate: View Certificate
Abstract
In modern days as automation is taking place thereby reducing the time required for doing household chores that results in increasing time utilization for other stuffs. One of such automated device is Vacuum Cleaner. While vacuum cleaners have made life easier in household chores, they are noisy as well as bulky. Hence it is required to improve the technology of vacuum cleaning to overcome these deficiencies. Here, is an attempt to achieve the same objective to develop a compact and efficient vacuum cleaner robot for office and home use. The proposed robot is disk-shaped, controlled by NodeMCU and work on Google voice command. The proposed system comprises of Node MCU, motor driving IC L239D, DC motors and IR sensor. Node MCU will be controlling the entire operation with the help of control signals, motors along with the help of motor driving IC will be helping in motion of the robot in any direction and IR sensors will be helping in detection of barriers for the navigation of the robot. To provide the commands to the robot we will make use of Google Assistant which can engage in two way communication. The PCB designing will be done with the help of Diptrace PCB design software and the programming part will be done with the Arduino IDE programming software. As the robot is working on voice commands it won’t be involving human efforts and time thereby making it a fully autonomous robot.
Introduction
I. INTRODUCTION
It is a say that “Time is Money”. In modern days as things are heavily turning towards automation so as to save time. The automation also helps in reducing human efforts to do unappealing household chores as well. Hence it is realistic to say that home appliances also require automation. Hair dryer, microwave, vacuum cleaners are some of the devices which involves automation heavily. One of these devices is vacuum cleaner.In recent times robots have been involved in cleaning purposes whether it is home, office or malls etc. These robots have been designed in such a manner that they can pick up the waste, do dry cleaning and mopping. In 2002 Roomba vacuum cleaner is introduced. It has silver colored Roomba, blue Roomba Pro and maroon Roomba Pro elite are known to be first generation vacuum cleaners. These were replaced by second generation cleaners also known as “400 series”.The 3rdgeneration 500 series Roomba was first introduced in August 2007it has a “Dock” so as to detect and avoid obstacles. The 500 series was replaced by the 600 series in 2012. The models of 600 series came with the AeroVac bin and the Advanced Cleaning Head. In 2011, iRobot announced the Roomba 700 similar to the 500 series, the 700 series features a number of improvement such as more robust cleaning system, HEPA filter and better battery life. These cleaning robots have its own pros and cons. The robots that utilizes laser mapping techniques are time and energy efficient but are costly. The obstacle avoiding cleaners have less time efficiency and less energy efficiency as well, but have the advantage of cost efficiency. Hence it is the need of the hour to design a cleaner robot that has both. Furthermore if it is possible to design a cleaner that works on voice command it will be just like icing on the cake.The proposed system is an attempt to make a vacuum cleaner that works on voice commands and is less noisy and bulky. It is an attempt in automation of vacuum cleaner by fitting requisite accessories in order to make this appliance make its place among numerous appliances in the market. This robot utilizesGoogle Assistance so as to give voice commands to the robots and Node MCU which has inbuilt Wi-Fi Module to control the operation of the robot. To train the system for working on Google voice command open source app Blynk is used. IR sensors are used to avoid collision and to move the vacuum cleaner motors is used. This system has advantages of low noise, ease of use, small size, light weight and autonomous cleaning. The robotic vacuum cleaner can be used at home or office for periodically cleaning the floor.
II. SCOPE
Google Assistance based consumer vacuum suction dusting robot is designed in order to collect the dry dust particles without human intervention.
III. PROBLEM STATEMENT
To design a vacuum cleaner that will intelligently work on voice commands to clean the floor.
IV. OBJECTIVES
A. To design a small sized, light weight and fully automated vacuum cleaner.
B. To design and implement a vacuum robot prototype by using NodeMCU.
C. To design a vacuum cleaner that will be controlled by voice commands for its operation.
D. To design a model that decreases boringness in cleaning and make cleaning less laborious.
V. BLOCK DIAGRAM
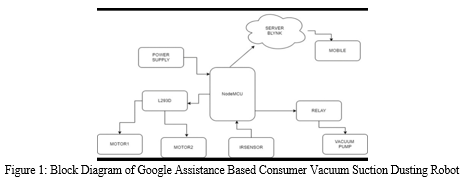
Figure1.shows the block diagram of Google Assistance Based Consumer Vacuum Suction Dusting Robot. This block diagram consists of 12V DC motor, L293D IC, IR Sensor, cleaning mechanism and node MCU microcontroller. The 5V relay works as switch. It controls the ONand OFF conditions of the motors. The robot used here consists of three DC motors where DC motors are used to rotate wheels of the robot and theother operations. L293 is the driver IC which we used for driving the motors to move in forward and backward directions. This is also called as ‘H’ bridge IC. L293D consist of 16 pins, 8 pins on each side. One L293D IC can run two DC motors. In this, it should take two types of path i.e. one is centric circle path and other one is zigzag path. The Blynk server is used on order to give the voice command training to the system. Blynk is an open source free app available on Google play store and is easily operable.
VI. FLOW CHART
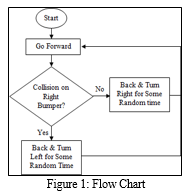
As we switch on power supply every component gets power on. As we provide Google command the system will switch on vacuum cleaner; it will start moving from its place and will clean area. While cleaning it will avoid the barrier that comes in between.Every time the cleaner is in operating condition it will check for potential barriers in its path, if barrier occurs it will change its direction of operation by moving either right or left.
VII. LITERATURE REVIEW
There are various autonomous and manual vacuum cleaners available in the market so as to make the cleaning more easily and time saving. In practice autonomous robots are more feasible as compared to the manual one. The reason of autonomous robots being more feasible as compared to the manual ones is that they are intelligently programmed and uses minimum human efforts for its working. There are many existing papers and models available online in order to make the cleaning more user friendly and time saving. Making use of slight intelligent programming and innovative techniques the purpose can be achieved.
- Uman Khalid &Muhammad Faze presented the model CLEARusing IEEE standard 1621 that acts in sync with humans. This CLEAR ROBOT had the features which are required for a household vacuum cleaner. It can work either automatically or manually. This robot has the similar mechanical construction with respect to the manual one butcan be operated manually as well as automatically. It has the capability to complete the assigned task and can deal with the environment around it easily.
- Mohd. Shahbaz Khan, Nagageetha and M.GurunadhaBabu presented the bluetooth controlled cleaning robot that utilizes Arduino. The system does the navigation through servomotors. The system is helpful for handicapped personnel but has the disadvantage of range of operation as Bluetooth range is very much limited
- NamanAggrawal, PiyushaChaudhari, AnshulMishrain in “Review paper based on cleaning ROBOT” describes a human friendly cleaning ROBOT system for ubiquitousdomestic use. The system does not interfere with human activities is described using the help of network. This system works including interactions with home appliances and other things and does not disturb human activities.
- P.S. Adithya, R. Tejas, V. SaiVarun, B.N. Prashanth in “Design and Development of Automatic Cleaning and Mopping Robot” introduced a ROBOT that was manufactured to facilitate both mopping and vacuuming mechanism. The system works in both manual and automatic modes. The robot makes use of IR sensors as well as Ultrasonic sensors for its navigation.
- P. B. Jarande. , S. P. Murakar. , N. P. Ubale., S. S. Saraf in “Robotic Vacuum Cleaner Using Arduino with Wi-Fi”provided a substantial solution to the problem of manufacturing robotic cleaner using local resources while keeping. It makes use of Arduino for its working making Arduino as the heart of the model.
VIII. COMPARISON BETWEEN THE DESIGN AND REFERENCE EXISTING SYTEMS
A. The robot that was manufactured facilitates both mopping and vacuuming mechanism. It works in both manual and automatic modes as of our project works with vacuuming mechanism on automatic mode with Google Assistance.
B. Ultrasonic sensors are used in reference project but we are making use of IR sensor for more accurate working.
C. The robot will be covering 90% to 92% of the area by following the patterns provided.
D. Reference project makes use of HC-05 Bluetooth module for connectivity as compared to internet based Google Assistance for connectivity which we are using.
E. The cost of the robot is less as compared to other cleaners present in the market as well as less time consuming in today’s fast moving society.
F. It helps in up gradation of existing monotonous and laborious cleaning process without spending big amount for the same.
G. As we are making use of voice command in order to operate the robot hence more area can be covered as compared to those cleaners that uses wired system.
H. The system is working in sync with humans hence is more user friendly and can deal with the obstructions easily.
IX. METHODOLOGY
- First using DIPTRACE PCB DESIGN SOFTWARE we will be designing the PCB Layout. Using multilingual interface and with the help of tutorials,DipTrace creates schematic diagrams to be printed on printed circuit boards.
- Using ARDUINO IDE PROGRAMMING SOFTWARE the NodeMCU is programmed. The Arduino Integrated Development Environment (IDE) is an application that is written in functions from C and C++ and can be used over cross-platform applications. This software is used to write programs& upload them to Arduino compatible processors.The coding is done with the help of C++ programming language with an addition of special methods and functions.
- The NodeMCU (ESP 8266)has inbuilt Wi-Fi moduleand also provides GPIO, PWM, ADC, I2C and one wire resources at your figure tip. It has built in USB-TTL serial CS340 for superior stability on supported platform. The NodeMCU is an open source i.e. free for everyone IOT product and feed up IOT application development process.
- The system will actuate and by listening to voice commands it will start cleaning the room.
- The system will make use of open source application Blynk in order to train the system for making use of Google voice command.
- Using Google Assistant voice command we will be providing the commands to the robot. This robot will work on voice command through Google assistant. Using ESP8266 as our micro controller the system will have control of complete action of our robot. Robot will work in circular as well as zigzag motion for cleaning purpose.
- Also when the sensor senses that there is an obstruction in the path it will give the acknowledgement to the controller and the controller will change the direction of the robot with the help of motors provided.
Conclusion
Using the embedded system and sensor technologies, a system can be built which can clean room in dry condition &can be operated by using voice commands of GOOGLE ASSISTANCE of IOT platform. Places like hospitals where noise is an issue the system can be used with low noise. The system can operate in sync with humans so the laborious and monotonous task of cleaning can be done easily.
References
[1] L293D datasheet. Website (www.ti.com) [2] S.Muruganandhan, G.Jayabaskaran, P.Bharathi, “LabVIEW-NI ELVISII based Speed Control of DC Motor,” International Journal of Engineering Trends and Technology (IJETT) Volume 4 Issue 4, April 2013. [3] A Technical Analysis of Autonomous Floor Cleaning Robots Based on US Granted Patents, European International Journal of Science and Technology Vol. 2 No. 7 September 2013. Liu, Kuotsan1, Wang, Chulun [4] http://web.stevens.edu/ses/me/fileadmin/me/senior_design/2007/group01/DesignFinal.pdf [5] http://eng.najah.edu/sites/eng.najah.edu/files/robotic_vacuum_pre_1.pptx [6] http://letsmakerobots.com/node/40288 [7] http://www.irobot.com/For-the-Home/Vacuum-Cleaning/Roomba.aspx [8] http://www.instructables.com/id/Floor-vacuum-cleaner-robot-controlled-byArduino-w/ [9] Ryo Kurazume, Shigeo Hirose, “Development of a Cleaning Robot System with Cooperative Positioning System” in Autonomous Robots (2000) Volume 9, Issue: 3, Publisher: Springer, Pages: 237-246 [10] Sewan Kim, “Autonomous cleaning robot: Roboking system integration and overview” in IEEE International Conference on Robotics and Automation 2004 Proceedings ICRA 04 2004 (2004) Pages: 4437-4441 Vol.5 [11] Chih-Hao Chen and Kai-Tai Song: “Complete Coverage Motion Control of a Cleaning Robot Using Infrared Sensors”, Proceedings of the 2005 IEEE International Conference on Mechatronics July 10, 2005, Taipei, Taiwan. [12] Charles A. Schuler, Willam L. Mcnamee, \"Industrial Electronics and Robotics,\"Mcgraw-Hill International Edition, Industrial Electronics Series, 2003. [13] [ManreetKaur, PreetiAbrol “Design and Development of Floor Cleaner Robot (Automatic and Manual) “International Journal of Computer Applications (0975 – 8887) Volume 97– No.19, July 2014. [6] A Study on Development of Home Mess-Cleanup Robot McBot- YoungkakMa, Seungwoo Kim, Dongik Oh and YoungwanCho. [14] HarshvardhansinhParmar, AnilkumarMeena, JafaraliBhovaniya, MiteshkumarPriyadarshi,“AUTOMATIC SMART MOP FOR FLOOR CLEANING”, International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 06 Issue: 04, Apr 2019 [15] “Design and Development of Automatic Cleaning and Mopping Robot” P.S. Adithya , R. Tejas , V. SaiVarun , B.N. Prashanth: ICONAMMA2018 [16] Review paper based on Cleaning Robot” NamanAggrawal, PiyushaChaudhari, AnshulMishrain : Corpus ID: 113690750 [17] “Robotic Vacuum Cleaner Using Arduino with Wifi”P. B. Jarande; S. P. Murakar; N. S. Vast; N. P. Ubale; S. S. Saraf: INSPEC Accession Number: 18116177
Copyright
Copyright © 2022 Miss. Falak Naaz, Prof. Gayatri Bhoyar , Prof. Amol Dhankar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45848
Publish Date : 2022-07-21
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online