

Ijraset Journal For Research in Applied Science and Engineering Technology
Hawk Eye Unmanned Aerial Vehicle for Monitoring
Authors: Abhishek Ingale, Mansi Vispute, Saurabh Sonawane, Hema Guthula, Prof. Dr. Rajiv Iyer
DOI Link: https://doi.org/10.22214/ijraset.2022.42082
Certificate: View Certificate
Abstract
Quadcopters are drones also known as unmanned aerial vehicles that can be controlled remotely. Quadcopters have uses in various fields. The Components required in building the quadcopter are its frame, Pixhawk flight controller, brushless DC motors, propellers, High Definition (HD) camera, Global Positioning System (GPS), telemetry module. Aerial security means performing security-aimed monitoring and surveillance operations with the help of airborne vehicles. These kinds of activities suggest that human officers (security organizations, law enforcement, police etc.) would be able to remotely monitor and view video and data acquired from Drones while planning and evaluating their operations. The spectrum of applications where drones are used for Security purposes include scouting and reporting emergencies, monitoring accidents and crimes, surveillance of a certain landscape area, operating in highly busy and pedestrians as well as their tracking from up in the sky, and so on. The project will serve as a bridge to connect actual happening in areas that cannot be navigated easily by security personnel of corporate institution as the Drone will be used to hover and record the actual happening as it transmit to a ground station which records and analyses the events as they stream in, Also, due its capability of flying over different altitudes the drone can generally be used on areas with rugged terrains or over water bodies for a time dependent on its power capacity.
Introduction
I. INTRODUCTION
Surveillance is the monitoring of the behavior, activities, Or other changing information, usually of people for the purpose of influencing, managing, directing, or protecting them. This can include observation from a distance by means of electronic equipment (such as CCTV cameras), Or interception of electronically transmitted information (such as Internet traffic or phone calls); and it can include simple, relatively no- or low-technology methods such as human intelligence agents and intercepted and aerial surveillance where drones are applied to relay information and gather the required data. Despite a law against the destruction of property, incidents of rioting, vandalism, and arson have been common during protests across the country. It is public property that often bears the brunt of protests. If people are trapped in a building, then it is advised to go to the highest Level. They also signal for help from the rooftop Unmanned Aerial Vehicle (UAV) is a type of aircraft which has no pilot or passenger on board. UAVs include both autonomously controlled (drones) and remotely piloted vehicles (RPVs) controlled via Radio transmitter. UAVs are commonly used in situations where there is a high risk in sending a human-piloted aircraft or where using a manned aircraft is impractical. Drones are being used in flood management and relief. A quadcopter is an aerial vehicle that uses four rotors for lift, steering, and stabilization. Unlike other aerial vehicles, the quadcopter can achieve vertical flight in a more stable condition. The quadcopter is not affected by the torque issues that a helicopter experiences due to the main rotor. Furthermore, due to the quadcopters' cyclic design, it is easier to construct and maintain. In the project design of a quadcopter is constructed to ensure it can achieve a total flight of 20 minutes in Air with the possibility of future progress to improve with time and robustness.
A. Applications of UAV (Drone)
There are many important activities of drones. Which are:
- National security
- As a long-range weapon of military war
- Public safety
- Environmental research
- Scientific research
- Small household work.
II. RELATED WORK
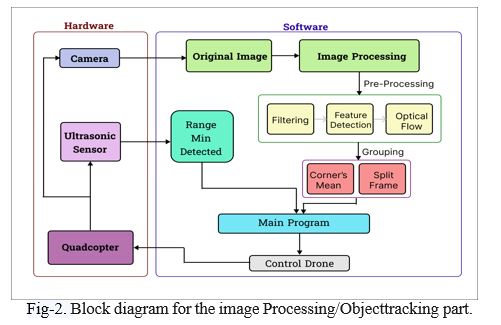
Object detection is used for people and vehicle detection in real time image processing applications such as unmanned aerial vehicle (UAV) detection. Object detection has been involved in many applications such as ship detection, leaf detection, vehicle detection and face detection, therefore it can be used for crime control purposes using feature extraction, thermal signatures etc. Many researchers have introduced several innovative techniques to stop or minimize the number of crimes or can be 1726 used in war as Humvee is a well-known example of this technology. An operator-based vehicle model has been suggested for controlling crimes, controlled from the base station using the short-range wireless network and also via satellite communication for long distance. The proposed vehicle is used for monitoring of the criminals using video cameras which are embedded in the vehicle and target the criminals via guns which are also embedded in the vehicle. This work is useful for the affected areas where police or security cannot access easily and the life of soldiers and officers at risk. So, for this purpose the use of autonomous vehicles and autonomous drones is very significant. As compared to automated vehicles UAV is faster, reliable, and unapproachable by criminals, cost effective, automatic and secure. It has better efficiency than an automated vehicle.
III. WORKING
7 components are motor, ESC, Pixhawk, power distribution, battery, receiver, and camera. The working of this diagram comprises of battery which is connected to the Pixhawk and power distribution and from Pixhawk the power is generated and goes to the four ESC and from power distribution, the power is generated and goes to the four ESC that is how the electronic speed control controls the speed of the four motors. The camera is connected to Pixhawk so that it records and captures images of any object and the receiver is connected to the Pixhawk which receives the signal.
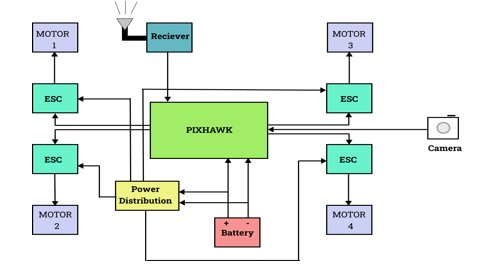
A video camera is mounted on the drone and this camera broadcasts the live information to the pilot on the ground. Depending on the drone, the receiver of the live information signals can be either the remote-control unit or a monitor.
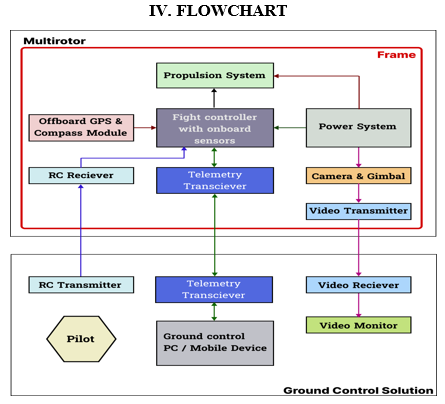
The system is divided in two Part: -
Part 1: - Multirotor
Part 2: - Ground Control Station
- In part 1 the Multirotor part consists of Propulsion system, power system, Offboard GPS and Compass Module, along with RC receiver and telemetry Transceiver, Camera & Gimbal and video transmitter and all of this connect with Flight Controller with Onboard Sensors, all this part are connected on drone which further communicated with Ground Control Station.
- In part 2 the Ground Control Station consist of RC transmitter Telemetry Transceiver, Video Receiver, Video Monitor and Ground control pc/mobile device this all part are connected and controlled by Pilot.
V. RESULTS
- The Quadcopter can fly 50 min above the ground continuously.
- The range of the remote controller is 2 KMs in open space but it can also be remotely controlled by the mobile applications Qground Control and Mission planner.
- With the help of build in hooks, the system can lift up to 500-700 kg for rescue as well as logistics
- The action camera can record fps videos as well as can transmit live footage over Wi-Fi.
- The 3D printed outer case would save this experimental drone from any detrimental crash.

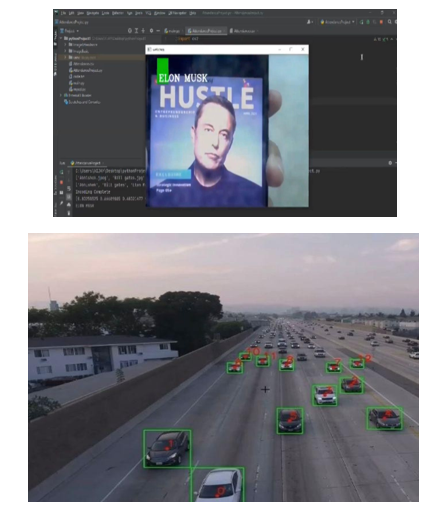
6. We used an object detection and face recognition algorithm for detecting weapons subjects.
7. The object detection and face recognition algorithm co images for storing shape of objects for detection and algorithm compares the shape of new input image in predefined database to detect exact object via its geometrical shape.
Conclusion
The designed quadcopter provides an efficient and reliable method for handling most of the situations that could be implemented in UAVs and also can be used in real-life for assisting the stranded people. The approach and results are limited due to the sensor range and can be improvised with more expensive and efficient pieces of equipment. The 3D printed case protects the components from any external damage during any unexpected crash. In case of emergency landing the drone returns to the location from where it took the flight. Also, the in-built hook helps for the rescue and logistics as it can be used to lift up any debris causing the water to flood or to deliver any medical kit or food items to the people stranded in the flood. From all of curve analysis we can conclude that overall, the performance of our system is stable. This system is capable of flying in different modes without complex. It’s performance, movement, orientation, motion, stability also good. This drone is capable to fly in several modes
References
[1] Pooja Srivastava, Tejaswi Ninawe, Chitral Puthran, Vaishali Nirgude, “QUADCOPTER FOR RESCUE MISSIONS AND SURVEILLANCE”, Journal of Computer Engineering (IOSR-JCE), pp. no. 48. [2] Tien-Yin Chou, Mei-Ling Yeh, Ying-Chih Chen, Yen-Hung Chen In, “DISASTER MONITORING AND MANAGEMENT BY THE UNMANNED AERIAL VEHICLE TECHNOLOGY”, Wagner W., Szekely, B. (eds.): ISPRS TC VII Symposium – 100 Years ISPRS, Vienna, Austria, vol. XXXVIII, Part 7B, pp. 137-142, July 5–7, 2010 [3] Gordon Ononiwu, Arinze Okoye, James Onojo, Nnaemeka Onuek-wusi , “DESIGN AND IMPLEMENTATION OF A REAL TIME, WIRELESS QUADCOPTER FOR RESCUE OPERATIONS”, American Jour- of Engineering Re- search (AJER), 2016Dr.K. Satheesh,A.Jahnavi,L.Iswarya,K.Ayesha,G.Bhanusek har,K.Hanisha. “Resume Ranking Based on Job Description using SpaCy NER model, ”2020 International Research Journal of Engineering and Technology (IRJET) [4] Vimal Ra j, Sriram, Ram Mohan, Mano j Austin, “DESIGN AND nal FABRICATION OF INCLINED ARM MINIATURE SIZED QUADCOPTER UAV”, IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-ISSN: 2278-1684, p-ISSN: 2320-334X, vol. 13, Issue 5Ver. IVI, pp. 73-76, Sep. - Oct. 2016 [5] Stuart M. Adams and Carol J. Friedland, “A SURVEY OF UNMANNED AERIAL VEHICLE (UAV) US- AGE FOR IMAGERY COLLECTION IN DISASTER RESEARCH AND MANAGEMENT”.
Copyright
Copyright © 2022 Abhishek Ingale, Mansi Vispute, Saurabh Sonawane, Hema Guthula, Prof. Dr. Rajiv Iyer. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42082
Publish Date : 2022-04-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online