

Ijraset Journal For Research in Applied Science and Engineering Technology
How the Latest Robots (Cobots) are Safely Powering Industrial Growth: What you need to Know
Authors: Akshay Bhati
DOI Link: https://doi.org/10.22214/ijraset.2022.40079
Certificate: View Certificate
Abstract
The main topic of this paper is about the transition of traditional industrial robots to collaborative robots. Firstly, the paper starts with an overview of the types of robots which exist in the industry, then the important part of the paper is described by getting into inner details about the collaborative robot’s functionalities by which the collaborative robots are safe to work alongside human beings. Without such safety features and requirements, it is very dangerous to operate such fast moving robots as it will put the lives of humans at stake. This paper will introduce you to a new generation collaborative robot. In the experiment, TM5-700 is used in collaboration with the sick-nanoScan3 (world’s smallest safety scanner in the market) to comply with higher levels of safety standards needed for the application.
Introduction
I. INTRODUCTION
The word robot has been derived from Czech word- Robota, which means a “slave laborer”, the term robot was introduced in 1921 by Karel Capek. [1] The definition of a robot is used in different ways by different organizations like International Organization for Standardization (ISO), Robot Institute of America (RIA), etc. Robots can take multiple forms so there is no 1 definition which can define what exactly makes something a robot. In layman terms, a robot is like a human being where it follows certain sets of instructions / programs just like how a human being would do. Robot is just like a machine which is controlled automatically and can be re-programmed in a variety of ways to perform complex series of actions and tasks. The tasks can be unique which is why there is a need to program the robot each time differently for that task resulting in it having this unique feature of “re-programmability”. Robot is a machine but not every machine is a robot. There is a very fine line between an ordinary computer/ machine and a robot, so the ordinary computer is not a robot because it relies on human beings to perform a task, it can sense around on its own and perform a task, unlike robots.
Robot is defined using 3 broad approaches:
A. Artificial Human-Beings
This approach is often used by scholars in literature, cinema studies and history by defining robots as artificial humans, where some historians still consider it as part of their early continuum called Automatons. Automatons are mechanical contraptions that were built to imitate human and animal movements. [2]
B. Programmable Machines
This approach is mainly found in the field of industrial engineering, where the robots are usually found in the surgical sector, warehouse setting, or manufacturing robots on the assembly line.
C. Sense-Think-Act Paradigm
A machine can be classified as robots only if it can do things like a human being, the 3 most important things are:
- Sense: Human beings sense the environment using sense organs like nose, ears, eyes, and so on, whereas a robot does it using sensors which act as their sensory organs to update them about their surroundings. These sensors enable the robot to understand its environment + conditions and perform several functions like identifying targets, identifying a safe path, avoiding obstacles, avoiding collision, etc. The sensor types are classified into 2 categories based on the type of input: digital and analog. Digital sensors just send on and off values in terms of electrical signals like voltage or current which correspond to the measured parameters from the robot. These electrical signals are directly sent to microcontrollers which are essentially like the brains of the robot. Microcontrollers work on digital signals so the communication between digital sensors and micro controllers are fast because they both understand the same language, whereas when it comes to analog signals then these are sent in current or voltage readings, which are usually in the range of 0 to 10v or 4 to 20mA. These signals are sent to a device called ADC (Analog to Digital converter) where the signal gets converted to a digital signal for the robot to be able to comprehend the data. In the previous generation of micro controllers Analog to Digital converter unit was not present so an additional hardware was to be integrated into the system, but these days new versions of micro controllers have Analog to Digital converter built-in into it.
- Think: Human beings perform this action with the use of the brain, but when it comes to the world of robots then this function is performed using hardwares like microcontrollers and microprocessors. After a robot senses the information then it gets sent to these hardwares where they process the information and perform the decision-making operations. For instance, how far the object is with which the robot can collide based on the distance the hardware sends signals to the other sensors involved in the operation like encoders to slow down the speed and then the speed and object distance is being monitored simultaneously which in turn results to the next step of the process- “Act”.
- Act: After processing the essential information and data from the sensors the robot must be able to act and execute a function. Robot uses motors and other actuators for performing the act of actions. The hardwares are DC motor, AC motor, servo motor, stepper motor, solenoids. For instance, a robot has a gripper which has force torque sensors on it, which helps in safely grabbing the target without damaging it. So after the object sees the target in the field of view let’s say using a vision sensor then the next step is to “act”- execute where it will go to the coordinate of the target, safely grab it, and move it to the drop off position. [3]
II. TYPES OF ROBOTS IN MANUFACTURING INDUSTRY
A. Industrial Robots
It is a special type of robot system which is designed for use in the manufacturing industry. These robots are configurable, automated, and can move freely on 3 or more axes. These robots are usually large in size and are stationary which enables them to have a higher payload capacity. Industrial robots are made of 3 crucial parts:
- Mechanics: These are the hardwares which are present on the robot like sensors, robot end effector, manipulator, etc which helps in speed, precision, accuracy, and payload.
- Electronics: It is like the brain system, which processes all the outside information and facilitates the communication across the robot.
- Computer Science: This consists of logic and programming which makes the robot smart-intelligent to be able to do intelligent tasks with the help of collaboration of robot, operator, and environment.
B. Types of Industrial Robots
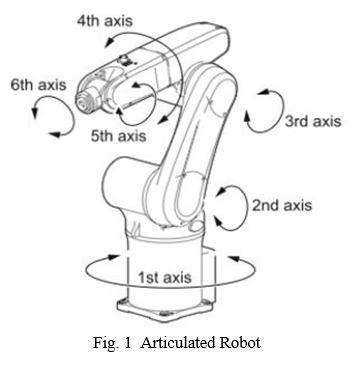
- Articulated Robots: These robots are the most used industrial robots in the industry. They consist of 2 or more rotating joints and typically have 4 or 6 axes.
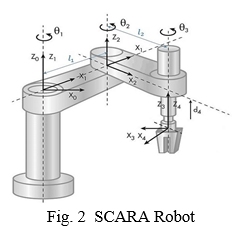
2. SCARA Robots: SCARA stands for Selective Compliance Assembly Robot Arm or Selective Compliance Articulated Robot Arm. It is made up of 4 axes. They are fast and precise so they can be used for high speed applications. They have a relatively lower payload, which targets applications like pick and place, sealant application, drilling, tapping, and assembly. [4]
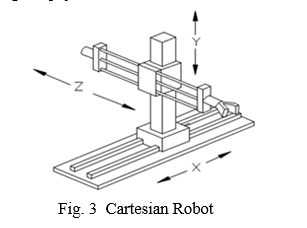
Cartesian Robots: These robots are also referred to as Gantry Robots. They have 3 axes – X,Y,Z. They are used for small and large footprint applications with a wide range of payloads.
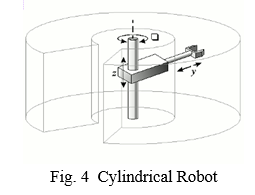
4. Cylindrical Robots: These robots consist of 2 types of joints- rotary joint along the joint axis for rotation and prismatic joint for linear motion. Typical applications for these are machine tending, assembly operations, and spot welding.
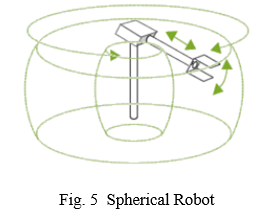
5. Spherical Robots: It is also referred as Polar Robot. It has 2 rotary joints and 1 linear joint. The work envelope is in spherical shape. Typical applications- machine tending, die casting, welding, and fettling machines.
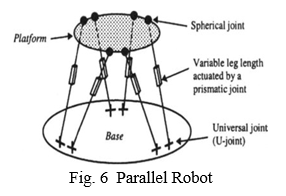
6. Parallel Robots: They are also known as Delta Robots. Used for high speed applications with a lower range of payload. It has a dome shaped envelope.
III. COLLABORATIVE ROBOTS
“Collaborative” as the word suggests, a workplace where people work together to achieve a goal, it’s another way of looking at teamwork. [5] So in the collaborative robot world, few humans are replaced by robots which work alongside humans to complete a task with a common goal. These robots are also referred as cobots, this type of robot registers people’s movements and position. These robots can do similar functions as industrial robots but additionally in a shared workspace, which is beneficial for companies where workspaces have space constraints. They are not fully autonomous so they still require an operator at times which will require safety measures to avoid hazards and that’s where collaborative robots’ sensors come into play. There are a variety of manufactures in the industry but few major ones leading the market are Techman, Yaskwawa, among others. Techman is in demand because of the ease of programming its robots and the on-board vision camera on the arm, on the other hand Yaskawa is among the top leaders because of its unique offering, for instance - Yaskawa Motoman HC20XP, world’s first collaborative robot with IP67 rating, making it a perfect solution for dust and washdown environment.
A. Collaborative Robots - SAFETY
Collaborative robots are referred to as safe robots because it has certain types of sensors in it which senses force which in turn enables them to work alongside human beings by making it safer than traditional robots. As compared to traditional robots, collaborative robots also eliminate the use of cages, cells, hard guarding, fencing, etc.
ISO 10218 are industrial robot safety standards, which have strict guidelines for robot manufactures which explains how collaborative robots need to be built and manufactured while conforming a set of safety standards.
ISO Technical Specification 15066 consists of 4 functionalities that should be present in the robot to be able to classify it as a collaborative robot.
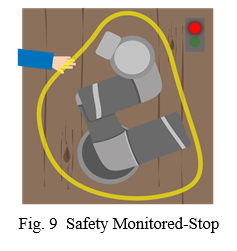
- Safety Monitored-Stop: This functionality is used when the human is in close vicinity of the robot and can be harmed based on the actions which robot will perform depending on the robot program. This function is used in applications where humans are not supposed to be present in the workspace at all times, so as soon as they are sensed in the workspace then the robot safety parameters triggers which makes the robot to pause on the action it was performing and then the robot will start only when its told to do so, mostly its done automatically as soon as the person leaves the workspace. It is used in applications like direct-part-loading-unloading, standstill functions, etc.

2. Hand-Guiding: Cobots of this type have a safety device attached to the head of the robot’s arm which is used when a person teaches a motion to the robot by moving its head. This operation is used before the robot operation begins. It eliminates the need of coding, making it simplified for the operator to teach the robot. This function is often used in applications where robots need to be taught a new path and motion often due to the changing application environment.

3. Separation & Speed Monitoring: For the wellbeing and safety of the robot’s colleagues, the speed of the motion is controlled based on the distance of the person from the robot, based on the distance, the robot’s speed might accelerate or decelerate. The distance interpretation is done using safety zones, based on which zone the person is in, the speed of the robot is monitored. This feature of the robot is generally used in applications which requires fast motion and heavier objects are involved. Once again, risk assessment is a critical step here to determine the level of safety.
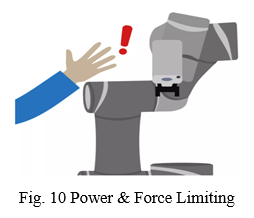
4. Power & Force Limiting: This is the most important function which makes a robot a collaborative robot, as other 3 functions are something which can be achieved even using an industrial robot by adding an extra layer of safety with the use of safety devices. This feature is exactly what people think of first as soon as they hear collaborative robots, because if you think of a space where robots are working alongside human beings then the first question which might arise is that how these humans are safe to work with the robots, that is where this feature comes into play. Cobots have sensors installed which sense power and force, based on the threshold limit. As soon as they sense a force, they will stop the robot and eliminate the ongoing task. A risk assessment is recommended to define the thresholds and in some applications, there might be a need to add an extra layer of safety, which is usually achieved using additional safety sensors. [6]
where collaborative robots’ sensors come into play.
IV. COBOTS > TRADITIONAL ROBOTS
A. Cost
Cobots are less expensive than traditional robots. Moreover, they need less time to program so it also saves money in the programming part.
B. Space
Cobots take up less workspace as they don’t need cages or cells or hard guarding to protect the robot, like how its required in case of a traditional robot. Also, they are smaller in size so it takes up less space and can be mounted to any location.
C. Flexibility
Traditional robots get bolted to the ground so it will only be used for that application, whereas in case of a cobot you can move it around to cater different applications, so it gives users more flexibility to solve multiple applications.
- Ongoing Costs: With cobots you don’t need to spend extra money regularly as they don’t really need maintenance, whereas in traditional robots you need regular maintenance.
- Programming: For traditional robots you need to have a special skill set or background of programming so you can write the code and implement it, whereas in cobot, the programming interface is very user friendly where no programming background is needed as such. So employees need to be trained so that they can do programming when needed.
- Intelligent Tasks: Cobots are not limited to just pick and place operation, they can do smart pick and place with the help of additional sensors onboard like a vision camera. With the help of which they can determine which objects to pick up and which to ignore based on shape, color, size, pattern, etc.
V. COLLABORATIVE ROBOT - TECHMAN
Techman is a Taiwanese collaborative robot manufacturer, which was founded in 2016 by Quanta Computer, Taiwan. Techman has unique cobots which are cost effective and provide a value to the customer by offering unique features. Techman is more than just a cobot manufacturer, as it develops embedded vision systems for the cobots. Techman Cobots solve a variety of applications such as pick and place, object picking, assembly, glue dispensing, palletizing, soldering, sanding, etc. Techman’s cobots are classified into 4 variants based on payload capacity and arm reach radius. Techman robot can carry a maximum of 14kg and max arm reach of 1300mm. Techman also has a mobile series which are powered on DC power and perfect fit to suffice AGV needs.
A. Techman Demo
Based on a risk assessment there will be many instances where you need an extra layer of safety, specially in fast paced applications or ones where a heavy load is involved. Once it is determined that we need more safety and the safety ratings of the hardware then we make use of safety sensors like a safety scanner. Where the purpose of the scanner is to sense the person in a workspace and control the speed or stop the robot based on the location of the person.
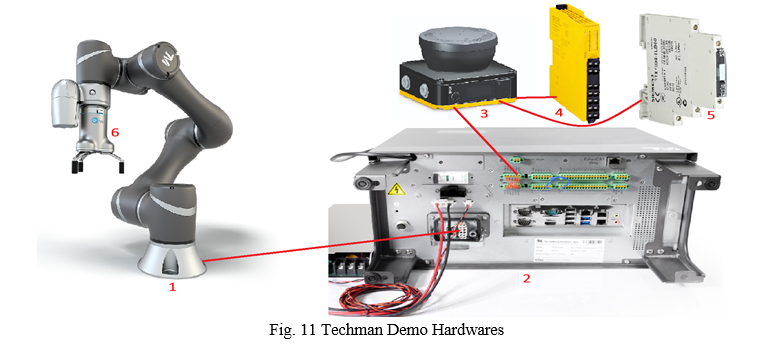
- Techman TM5: It is a regular payload series collaborative robot, which can lift a maximum payload of 6 kgs and has an arm reach of 700mm. It has Force limiting function, which complies with the ISO 10218-1:2011 and ISO/TS 15066:2016 human-robot cooperation safety requirements for collaborative robots, allowing the robot to be programmed with both speed and force limits.
- Techman Controller: The controller has 16 IOs and 4 safety IOs. It offers bus communication protocols to talk to the PLC or the machine, like ethernet IP, ethercat, modbus, etc. Controller also has USB and HDMI ports to connect external devices.
- SICK Nanoscan3 Safety Scanner: SICK is a German company which manufactures automation sensors, and when it comes to safety then they are the leaders since they invented safety light curtains. Nanoscan3 is a safety lidar from SICK, which is the world’s smallest safety scanner in the market, a perfect fit for AGVs and AGCs where form factor is critical. Nanoscan3 is based on a time-of-flight technology, where it emits multiple pulse at every resolution and gets the reflection back from the target by which it calculates the time taken for the pulse to come back and since then speed of the light is constant, so it calculates the distance of the target. This scanner has a unique SICK’s patent technology called safeHDDM, where HDDM stands for high-definition distance measurement. This technology enables the scanner to send multiple pulses at every resolution resulting in more data which results in close to no false trips in harsh environments like welding sparks, fog, dust, mist, etc. The scanner works with the help of zones / fields, which are programmed in the scanner. Safety scanners have 2 types of fields - protective field upto 3m and the warning field upto 10m. [7] Protective field is tied up to the safety outputs of the scanner called OSSD (output signal switching device) and warning field is tied up to the universal IO. In this demo, the scanner is programmed to have 1m x 1m protective field and 1.5m x 1.5m warning field. Both these fields are tied to the controller’s safety IO via relays. So, a protective field which is OSSD is tied up to the safety relay and then to one of the safe IOs and a warning field which is the universal IO is tied up to the non safe relay going to one of the safe IO of the controller. As the person approaches the robot and breaches the warning field at 1.5m then the robot speed for the motion goes below at 50% speed and when the person breaches protective field at 1m then the robot comes to a complete stop, as the person goes away and clears up the zone then the robot starts and then increases the speed from 50% to 100% as the 2nd zone is cleared up.
- SICK Safety Relay: This is the new relay from SICK from the “ReLy” relay family, which are in slim form factor. Protective field of the scanner and OSSD output of the scanner are tied up to this relay, which makes the robot to a complete stop once this output is triggered.
- Siemens Non-Safe Relay: Warning field of the scanner and one universal IO is tied to this relay which controls the speed of the robot.
- OnRobot 3FG15 - Long-Stroke 3-Finger Centric Gripper: This is a 3 finger gripper for OnRobot which can lift upto 15kg of payload and ideal for gripping a variety of cylindrical objects in machine tending applications.
VI. ACKNOWLEDGMENT
I’d like to thank my employer EandM for giving me an opportunity to work on these bleeding edge technologies and providing funding for the demo/experiment.
Conclusion
This paper talks about the need of transition into collaborative robots to meet the demands and needs of industry 4.0, also called the Fourth Industrial Revolution. Paper lays a heavy emphasis on the need to comply with the safety standards as stated by Occupational Safety and Health Administration (OSHA). The experiment conducted in the paper clearly concludes that the addition of appropriate hardware to any robot can help suffice all the needed safety requirements needed for the application. This paper is a good resource for users who are entering the collaborative robot’s space or planning to transition to it as it explains the benefits of the transition from traditional robots. Understanding the reasons and the ways to achieve safety standards will be extremely useful for the users.
References
[1] Maki K. Habib, Handbook of Research on Advanced Mechatronic Systems and Intelligent Robotics, Hershey, PA, USA: IGI Global, 2020. [2] Dotson, C., “George Washington Sees Automatons in Action,” Washington Papers., vol. 01, pp. 1, Jan. 2020. [3] Sinha, P., “The sense-think-act model,” Siemens Digital Industrial Software., vol. 01, pp. 8, Jan. 2020. [4] M. Minner. (2019) Sponsored article homepage on IndustryWeek. [Online]. Available: https://www.industryweek.com/sponsored/article/22027700/4-types-of-robots-every-manufacturer-should-know [5] (2012) Lumapps website. [Online]. Available: https://www.lumapps.com/solutions/enterprise-collaboration/types-of-collaboration/ [6] (2019) A3 Association for Advancing Automation website. [Online]. Available: https://www.automate.org/blogs/what-are-the-4-types-of-collaborative-robots [7] “NANS3-AAAZ30AN1 data sheet,” SICK, Germany, Europe.
Copyright
Copyright © 2022 Akshay Bhati. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40079
Publish Date : 2022-01-26
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online