

Ijraset Journal For Research in Applied Science and Engineering Technology
Hurddle Detection for Special (Blind) People
Authors: Divya Gaikwad, Pradnya Gaikwad , Yuvraj Solse, Shubham Shukla, Shital Mehta
DOI Link: https://doi.org/10.22214/ijraset.2022.45395
Certificate: View Certificate
Abstract
Ongoing headway in advancement is making the life flourish, more straightforward and simpler for normal person. The World Health Organization (WHO) insights demonstrate that a lot of individuals experience visual misfortunes, in view of which they experience numerous troubles in regular positions. Subsequently, we want to structure humble, secure, wearable, and flexible system for outwardly impeded to help them in their day-to-day schedules. For this, the arrangement is to make a successful framework which will help outwardly debilitated individuals through hindrance recognition and scenes characterization. The proposed strategy uses Arduino board (UNO or Nano), Ultrasonic Sensor and Arduino, mounted on the stick of the person. Tensor Flow Object Detection calculation. The said methods are utilized to distinguish objects. We likewise utilized a ultrasonic sensor mounted on a servomotor to gauge the distance between the visually impaired individual and impediments. The introduced research uses straightforward computations for its execution and identifies the impediments with an eminently high productivity. When diverged from various structures, this system is a negligible exertion, helpful, and easy to wear.
Introduction
I. INTRODUCTION
Since the running of day-to-day existence of visually impaired individuals is extremely challenging. This venture assists them with running their life not surprisingly.
They can make this undertaking as a contraption or a gadget in their grasp which identifies the deterrent. This undertaking is more effective than the current framework with less expensive and exact one. Here we are utilizing Arduino UNO board to play out this activity.
To make the life to be as a typical one for the visually impaired people groups this might be exceptionally useful undertaking for them. By making this as a contraption or a gadget in their grasp they can withoutmuch of a stretch adjudicator an item by their own by realizing the signal sound.
The framework involves ultrasonic
wide scope of field to identify an item with its higher location range.
A. Existing System
Till the most recent couple of years, there are numerous new advances have been created for outwardly tested people groups. In any case, there are a great deal of impediments and limitations on those new developments.
Shovel [1] proposed a method for the blind people. He proposed two distinct sorts of sounds. The significant disadvantage of his work is to distinguishing proof of the sound. The visually impaired individuals cannot separate the sounds.
Yuan [2] introduced concept of active triangulation that was used in his proposed device. It will distinguish the article. The primary disservice of this work is, it can recognize the item at the pace of 15 estimation/second and furthermore faces a surface discontinuity.
JM. Benjamin [3] proposed a three-direction detectable laser cane. The bearing is 45 degrees over and lined up with the ground and with sharp profundity. It is fundamentally a hit and preliminary strategy it is utilized exclusively in indoor frameworks.
The principal detriment in his framework is it is not reasonable for open air exercises.
Pooja Sharma [4] created a device for blind people. All things considered the item has been identified however inside a specific reach. just inside that range the article can be distinguished.
This was the significant impediment in this paper.
All the above existing framework cannot fulfill the specific requirements of the visually impaired people groups. They utilize a white stick and pet canines which is extremely costlier and challenging to keep up with.
To beat those impediments this undertaking will help.
These days there is a ton of innovations accessible for the outwardly tested yet our undertaking is less expensive among them.
B. Proposed System
The proposed framework manages the less expensive and powerful obstruction discovery with a wide scope of inclusion. The device includes the following components:
- Arduino board (UNO or Nano)
- Ultrasonic sensor
- Relay module
- Connecting wires
- Arduino board: The Arduino is an open-source hardware and software that can make a user to do effective operation in it. The Arduino is a microcontroller. These microcontroller devices help in sensing and controlling the objects in the real-time situations and environment. These boards are available cheaper in the market. There are a number of inventions performed in it and still it is going on.

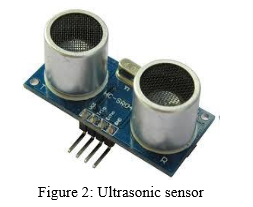
2. Ultrasonic Sensor: The ultrasonic sensor consists of transmitter, receiver, and transceiver. The transmitter converts electrical signal into soundwaves. The receiver converts the soundwaves into electrical signal again. The transceiver performs both the receiver and transmitter operations. It also has crystal oscillators in it. It will perform the stabilization operation in the ultrasonic sensor.
3. Jumper Wire: The jump wires are also known as jumper wire used to connect devices. Without soldering we can make an easier connection with devices. These are available as a set of wire that has the pin on both sides. These wires are used as making their one end connecting to the corresponding device and another end to the breadboard.
4. Relay Module: The relay is the device that open or closes the contacts to cause the operation of the other electric control. It detects the undesirable condition with an assigned area and gives the commands to the circuit breaker to disconnect the affected area through ON or OFF.

5. Arduino Software: The Arduino is the most used programming software to perform the above-mentioned operation. Using some program in the software we can do every operation.
II. WORKING OPERATION
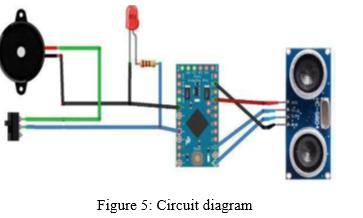
This proposed system consists of the equipment like Arduino UNO, ultrasonic sensor, bread board, buzzers for detecting the obstacles and letting the user know about the obstacle, Red LEDs, Switches, Jumper cable, power bank, Male and female header pins, some elastic and stickers to make the device wearable as a band for wearing for the users. The wiring of the device is done in a following manner. The Ground of LED, buzzer is connected to GND of the Arduino. The +ve of the LED and the middle leg of switch is connected to the Arduino pin 5. The +ve of the Buzzer is wired to the first leg of the switch.
The Ultrasonic sensor is wired accordingly. The Ultrasonic sensor pin VCC is connected to the Arduino pin VCC, Ultrasonic sensor pin GND is connected to the Arduino pin GND, Ultrasonic sensor pin Trig is attached to the Arduino pin 7, Ultrasonic sensor pin Echo is connected to the Arduino PIN 6. The switch used here is for selecting the mode. (Buzzer should need or not). At the end, after all the connections are done to the Arduino board upload the code to Arduino board and power the other modules using a power bank or the power supply.
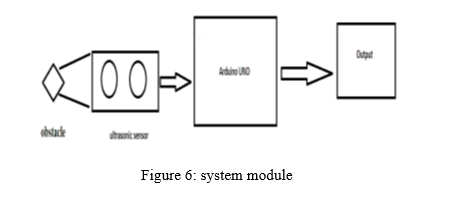
The Ultrasonic sensor here used as a transceiver. The ultrasonic waves are emitted by the transmitter when the objects are detected. Both the transmitter and receiver re resent inside the ultrasonic sensor. We calculate the time interval between the transmitted and received signal. The distance between the object and sensor is calculated using this.
When we increase the distance between the object and the sensor the coverage angle will decrease.
Sensor has coverage of 60 degree. Thus, the objective is to cover a wide angle to detect the obstacles with the help of the ultrasonic sensors to help the blind and make it easy for them to move around easily without any hassle. Hence, the distance calculation is calculated, and the sensor detects and the further procedure of the buzzing sound to the user is carried out.
Thus, this way Third Eye for Blind will be designed for the visually impaired people and will make it quite easy and convenient as it will be a wearable device and thus will help the user in travelling and detecting the obstacles while walking quite easy.
III. SYSTEM ARCHITECTURE
IV. RESULTS
With the improvement of the living standards of the people, we have become so materialistic that we have forgotten how the physically disabled people live a tough life. They undergo rigorous, indifferent behavior towards them for being physically disabled. They become dependent on other people in a way for their day-to-day routine chores. Blind and impaired persons always depend on other people for their regular activities. Eyes are responsible for observing and listen the outside environment; dysfunction of such prime sense organ severely affects the knowledge perceiving capability of the outside environment. Therefore, going around to places in such an environment is a very big challenge because blind people cannot depend on their own eyes and thus face many difficulties. This project will help them to overcome their obstacles.
Conclusion
The objective of this project is Third Eye for the Blind is to design a product which is very much useful to those people who are visually impaired and those who often have to rely on others. The third eye for Blind project is an innovation which helps the blind person to move around and go from one place to another with speed and confidence by knowing the nearby obstacles using the help of the wearable band which produces the ultrasonic waves which notify them with buzz sound or vibrations. It allows the user those who are visually impaired to walk freely by detecting the obstacles. They only need to wear this device as a band or cloth on their body. Thus, this project Arduino based obstacle detector for blind people is a new method to resolve their problems. A less complex portable, cost efficient, easy to manage an effective system with many more amazing properties and advantages are proposed to provide support for the blind. The system will be quite easy to find the distance between the objects and the sensor. It can detect the objects in every direction the the blind person. Without the help of others, the blind person can move from one place to other and lead their regular lives independently.
References
[1] S. Shovel, I Ulrich, J. Borenstien.Nav Belt and the Guide Cane, IEEE “Transactions on Robotics & Automation”. 2003; 10(1):9-20. [2] D. Yuan R. Manduchi. “Dynamic Environment Exploration Using a Virtual White Cane”, Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), University of California, Santa Cruz, 2005, 1-7. [3] JM. Benjamin,NA. Ali, AF. Schepis. “A laser cane for the blind”, Proceedings of San Diego Medical Symposium, 1973, 443-450. [4] Pooja Sharma,SL. Shimi,S. Chatterji. “A Review on Obstacle Detection and Vision”, International Journal of Science and Research Technology. 2015; 4(1):1-11.
Copyright
Copyright © 2022 Divya Gaikwad, Pradnya Gaikwad , Yuvraj Solse, Shubham Shukla, Shital Mehta. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45395
Publish Date : 2022-07-06
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online