

Ijraset Journal For Research in Applied Science and Engineering Technology
Implementation of a Real-Time Vision Based Vehicle License Plate Recognition System
Authors: Arti Gothe, Prof R. D. Kadam, Dr. N. M. Chore
DOI Link: https://doi.org/10.22214/ijraset.2022.41782
Certificate: View Certificate
Abstract
Automatic Number-plate recognition is a technology that uses visual cues in images to read vehicle registration plates to create vehicle location data. It can use closed television, traffic law cameras, or cameras designed for work. ANPR is used by police around the world for legal purposes, including checking whether a vehicle is registered or licensed. It is also used for the collection of electronic toll on individual toll roads and as a catalyst for traffic mobility, for example by highway agencies. The automatic number plate recognition can be used to store camera-captured images and text from the license plate, another configurable to save the driver\'s image. Systems usually use infrared light to allow the camera to take pictures at any time of the day or night. An Intelligent Vehicle Safety recording system that uses image processing usually requires a large internal memory register or DDR SDRAM (Random Double Data Access) for temporary video and photos. But these processes often increase the complexity of hardware and software. In this program, we propose a VLSI implementation for a photographic route departure system. It is not only a calculation of line melting and discrimination outside the line, but also a real-time analysis of car tires on the left and right side of the track marker with a video image, and then judge the car offsets phenomenon.
Introduction
I. INTRODUCTION
In recent years, many developed countries have played a major role in vehicle safety directly related to the Advanced Safety Vehicle (ASV) field with high vehicle safety awareness and technological advancement. It incorporates a car image security system for the integration of safety technology applications to improve traffic safety and reduce the incidence of road accidents. The video protection system has restored data diversity, low cost and other advantages with different image algorithms. It provides a completely new way of technological advancement in the automotive safety system. Many automotive depots are beginning to learn the use of CCD / CMOS cameras with car driver driver algorithms. The most important of the image processing algorithms is the core of the software for assisting video drivers. Determines all system function and sensitivity, processing technology. The unintended consequence of impaired driving and reckless driving often lead to serious accidents.
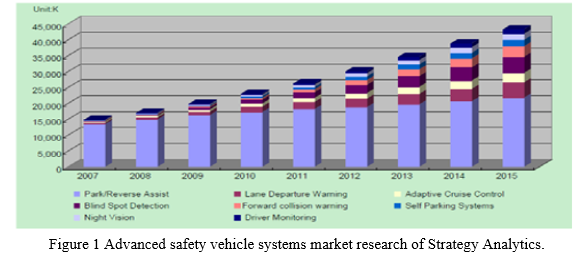
Route warning system can avoid this critical situation. If the vehicle is about to deviate from its freeway or on passing roads, the system will alert the driver. In 2008, the European Union issued the necessary rules and regulations for the safety of motor vehicles. One of the requirements is to upgrade safety technology equipment: in 2013, M2, M3, N2, and N3 vehicles (vehicles and trucks) must have an off-road warning system (LDWS), as well as M1 and N1 vehicles optionally. But after 2015, all vehicles must be fitted with LDWS. Market analysis conducted by Strategy Analytics: The global automotive market requires ASV and LDWS. There will be significant growth, as shown in Figure 1. Several LDWs have been developed for a variety of technologies [1-9].
B. Yu, W. Zhang and Y. Cai [1] used a Gaussian template to remove contaminated stains from the image and the flexible border choosing to obtain route markings. The TLC and the CCP method are used to make the decision to deviate from the route. Cl 'audio and Christan [2] have proposed a navigation warning system that measures route status using a linear parabolic model. P. Y. Hsiao, C. W. Yeh, S. S. Huang and L. C. Fu [3] proposed a real-time LDWS based on ARM. A smooth Gaussian 1-d and a world-wide detector were adopted to reduce the effects of noise on the image and the decision to move the route is based on local and temporary procedures.W Zhu F.Liu, Z Li, X. Wang & S. Zhang [4] developed an algorithm for selecting a parameter model of a normal curved route that can define both straight and curved lines.
N. M. Enache [5] used a combination of Lyapunov Functions, static polydral sets and a linear matrix (LMI) equilibrium system to operate a avoidance system. M. J. Jeng [6] proposed the LDWS application for hardware and software. Hardware is used by FPGA. In software design, global edge acquisition is able to transfer the gray level to the binary pattern and show the edge of the object and earn route markers by obtaining the highest value and integration, curb connectivity, route segment combination and route line selection. Because the trail markers are issued based on color information, H. Y. Cheng [7] suggested how to use size, shape, and movement information to get a route marker.
A. AM. Assidiq [8] suggested a route marker with a Canny edge detector and Hough marks. The video protection system has gradually evolved into an integrated chip system (System to Chip, SoCs) which can simultaneously capture multiple camera images. It can integrate effectively and enhance the value of technology. This paper not only aims at image processing algorithm to detect the front lines of cars, but also can calculate the relative position of the vehicle, and then reach the function of warning the movement of the route. It can reduce the risk of an accident with a timely LDW warning. People can quickly adjust their driving style or get their brakes off early. It can achieve low cost, small size and small power benefits if the system is used in VLSI.
The form of this paper is an extension of the J. F. Liu [9], and is organized into 4 sections. The basic processing step is introduced in phase 2. The system structure is introduced in phase 3. Phase 4 presents the implementation results of FPGA and VLSI.
II. PROPOSED WORK
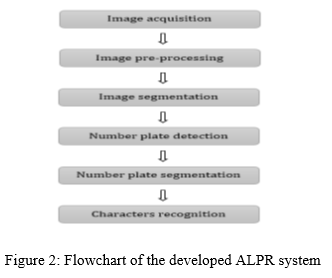
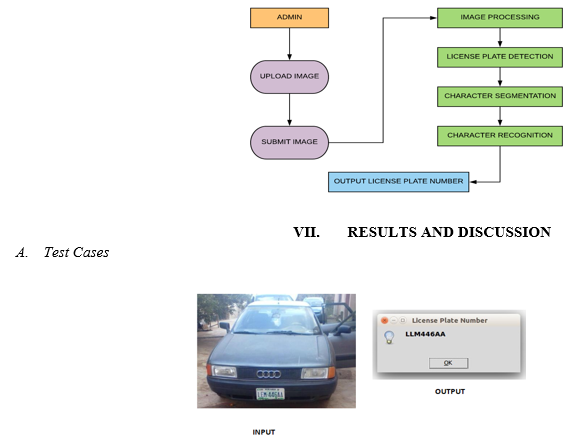
The Automatic Number Plate Recognition system designed for this project has been developed as a PYTHON application in Microsoft's Integrated Development Environment (IDE), Microsoft Visual Studio, integrated with the latest version (v3.4) of Open CV library in to be able to use the most powerful Computer Vision resources ALPR programs consist of four main stages: image detection, number plate extraction, numerical separation and character recognition.
However, in this project, to facilitate the development of the ALPR system, the division of the second phase, the issuance of numerical numbers, into three new phases. The new categories are: pre-image processing, image classification and digital photo acquisition. Therefore, the developed system is divided into six well-defined sections for each of the following sections. In Figure 2, the flowchart for this program can be appreciated.
III. TOOLS / PLATFORM TO BE USED
A. As its very definition implies, reading is the process of acquiring knowledge by studying something. In a typical machine learning environment, this learning activity is computer-generated, thus enabling the development of a computer program that automatically develops information. There are three machine learning areas.
B. Data mining: this type of program aims to use large amounts of data that people can manage on their own to improve decisions. This provides, for example, a very useful application in the medical field, as it allows for the creation of medical information based on medical records.
C. Software apps: unbelievable as it may seem, not everything in this world can be edited by humans. However, with the help of machine learning techniques, these horizons can be expanded. For example, these types of techniques are currently being used successfully in areas such as automatic driving, speech recognition, image recognition or, as in the case of this project, Default Number.
D. Custom programmers: although most people may not see it, almost everyone interacts with this last niche every day. In fact, it is this type of technology that is the source of the information that people often receive in their personal interests when they use the Internet.
E. Final output is displayed on the html page linked to the main system is displayed in the GUI window. The output page contains a "Upload Data" button. After you like this button a script is used that removes values ??from the database.
F. With the exception of the basics just described, machine learning algorithms are so numerous and varied that very little is the same. In fact, even a single machine learning algorithm can be designed in endless ways. Therefore, in choosing the most suitable design, good evaluation is key, usually done with a few statistics.
IV. LICENSE PLATE RECOGNITION (LPR) DESCRIPTION
License plate recognition (LPR) has been one of the most effective ways to monitor vehicles. It can be used in many public places for other purposes such as road safety enhancement, automated toll collection, car parking system and automated parking system. ALPR algorithms are generally divided into four stages:
- Photographing a car
- Obtaining a number plate
- Separation of characters once
- Character recognition.
The first step is, photographing a car looks very simple but it is an expected task as it is very difficult to photograph a moving car in real time in such a way that there is no part of the car especially the number plate of the car to miss. Currently the detection of the number plate and processing time is less than 50 ms in most systems. The success of the fourth step depends on how well the second and third steps are able to locate the vehicle and identify each character. These systems follow a variety of methods to find the car's number plate on the car and extract the car number from that image. Most ALPR systems are based on common methods such as the artificial neural network (ANN), the Probabilistic neural network (PNN), and Visual Recognition (OCR). Key feature, Python, configuration module, slide focus window (SCW), BP neural network, support vector support (SVM), readable read, regional base, color separation, abstract based algorithm, feature conversion scale (SIFT), tri-chromatic imaging, The Least Square Method (LSM) for online license plate matching based on weight-based editing and color-distinguishing features. A case study of a student license plate (LPR) is described in. Some authors focus on developing low-resolution solutions.
a. License plate recognition (LPR) is a type of technology, especially software that enables computer systems to automatically read the registration number (license number) of vehicles from digital images.
b. License Plate Recognition Systems uses the concept of visual cues to read letters on a car plate. In other words, the LPR takes a picture of the car as an input and removes the letters written on its license plate.
V. STEPS
LPR also called ALPR (Automatic License Plate Recognition) has 3 major stages,
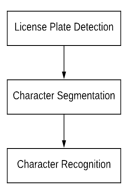
A. License Plate Detection
- This is the first and perhaps most important phase of the program. It
- It is at this point that the license plate is determined. Included in this section is a photograph of the vehicle and the output is a license plate.
B. Character Segmentation
At this stage the letters on the license plate are mapped and separated by individual images.
C. Character Recognition
This is where we end things. Prefixed characters are identified here. We used machine learning in this case.
VI. DATA FLOW DIAGRAM

As mentioned earlier, in the main trial, three separate tests were performed where the quantitative results were obtained. These tests are: the attention of the numbers of the front numbers, the recognition of the numbers of the back plates and the recognition of the numbers of the plates of the earth. The following sections provide the results of these tests and their corresponding discussion.
B. Front Number Plates Recognition
The results obtained from this preliminary test, the recognition of previous numbers, in terms of the three analyzed success rates are shown in Table 2.3.
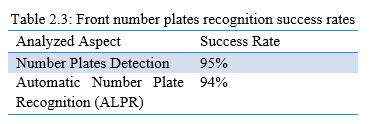
Unsurprisingly, the high rate of success of this test is a staggering 99.6% obtained Optical Character Recognition, which gives the impression of a highly competitive KNN separator. With regard to the acquisition of Number Plate, more than 95% success was also achieved. The reason why this success rate is slightly lower than the previous one is not because of the performance of the SVM separator, which is actually very efficient, but because of the complexity of the image separation process.
Finally, the ALPR success rate, based on the previous one, had a remarkable 94% positive effect. The last analyzed feature, the time frame for detecting the numbers of the previous plates, is shown in Table 2.4.

C. Rear Number Plates Recognition
For the second test, the recognition of the numbers on the back plates, the results obtained in terms of the three revised success rates are shown in Table 2.5.

In this case, some reductions in the success rate were analyzed compared to those in the initial test can be attributed. In fact, 89% success is achieved in acquiring the Number Plate, which is 98.7% of Optical Character recognition and 85% of ALPR. This is mainly due to the common location of the number plates on vehicles, usually hidden under a boot cover. This causes the image to be permanently attached to the number plate, which impairs the normal operation of the ALPR system and, in particular, the image separation stage. For the estimated performance time for the back plate numbers, can be seen in Table 2.6.

This average performance time is very similar to that found in the first test. In fact, it comes with 2.7 seconds, which proves that the advanced ALPR system is also really fast at detecting rear plate numbers.
- The main test conducted gave a world success rate of 90% with an average response time of 2.9 seconds, which is a clear indiation of the high competitiveness of the advanced ANPR system.
- Achieving this would be extremely difficult without the use of a Vector Machine Support and Neighborhood K-Nearest Neighborhood, which is very efficient in its associated functions, number detection and character identification, respectively.
- In particular, it is appropriate to highlight the excellent performance of the advanced Optical Character Recognition (OCR) program, in which KNN participates, which achieved an incredible 99% success rate.
Conclusion
In this project, an Automatic Number Plate Recognition (ALPR) system has been developed that uses two electronic learning methods, SVM and KNN. This program detects a car image, analyzes it and analyzes it using several Computer Vision techniques and two algorithms specified by the machine and, finally, identifies the vehicle number from the image. This program has achieved its purpose due to the good design and implementation of each of the different phases it contains. These categories are image acquisition, pre-image processing, image classification, number plate detection, numerical classification and character recognition. With regard to the corresponding tests performed, although some aspects of the ALPR system will still need to be refined in order to achieve optimal performance in them, they have also shown positive results often giving an idea of the strength of the vaccine advanced system. However, some limitations were also found in the advanced ALPR system. Mainly weak performance compared to the image classification phase. This problem can be solved by inserting the current image-sharing method with RANSAC or other more powerful methods. However, this will increase the calculation costs and, unless the same processing method is used, the process speed will be reduced. Therefore, it may be because of this that professional systems are constantly using infrared cameras in the image capture phase, eliminating the complexity of the image separation stage and, thus, the whole problem.
References
[1] B. Yu, W. Zhang, Y. Cai “A Lane Departure Warning System based on Machine Vision” in IEEE Pacific-Asia Workshop on Computational Intelligence and Industrial Application, 2008, pp.197-201. [2] C.R. Jung, C.R. Kelber “A Lane Departure Warning System Using Lateral Offset with Uncalibrated Camera” in Proc. Int. IEEE Conf. on Intelligent Transportation Systems, Sep. 13–16, 2005, pp. 348-353. [3] P. Y. Hsioa, C. W. Yeh, S. S. Huang, L. C. Fu “A Portable Vision Based Real-Time Lane Departure Warning System : Day and Night”, IEEE Trans. Intelligent Transportation Systems, vol. 58, no. 4, pp. 2089-2094, May 2009. [4] W. Zhu, F. Liu, Z. Li, X. Wang, S. Zhang “A Vision Based Lane Detection and Tracking Algorithm in Automatic Drive”, in IEEE Pacific- Asia Workshop on Computational Intelligence and Industrial Application, 2008, pp.799-803.. [5] N. M. Enache, S. Mammar and M. Netto, B. Lusetti “Driver Steering Assistance for Lane-Departure Avoidance Based on Hybrid Automata and Composite Lyapunov Function”, in IEEE Trans. On Intelligent Transportation Systems, March 2010, vol1, pp.28-39. [6] M. J. Jeng, C. Y. Guo, B. C. Shiau and L. B. Chang, “Lane Detection System Based on Software and Hardware Codesign,” in Proc. 4th Int. IEEE Conf. on Autonomous Robots and Agents, Feb. 10-12, 2009, pp. 319 - 323. [7] H. Y. Cheng, B. S. Jeng, P. T. Tseng, K. C. Fan, “Lane Detection With Moving Vehicles in the Traffic Scenes,” in IEEE Trans. on Intelligent Transportation Systems, Vol.7 Dec. 2006, pp. 571-582. [8] A. AM. Assidiq, O. O. Khalifa. Md. R. Islam, S. Khan, “Real Time Lane Detection for Autonomous Vehicles”, in Proc. Int. IEEE Conf. on Computer and Communication Engineering, May. 13-15, 2008, pp. 82 – 88. [9] J. F. Liu, Y.F. Su, M. K. Ko and P. N. Yu “Development of a Vision- Based Driver Assistance System with Lane Departure Warning and Forward Collision Warning functions” Digital Image Computing: Techniques and Applications, 2008, pp. 480–485. [10] Sudhir Sharma, Wang Chen, “Using Model-Based Design to Accelerate FPGA Development for Automotive Applications”, in 2009 SAE World Congress, January 1-15,2009.
Copyright
Copyright © 2022 Arti Gothe, Prof R. D. Kadam, Dr. N. M. Chore. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41782
Publish Date : 2022-04-23
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online