

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Implementation of an Automatic Physiotherapy Device for Ankle
Authors: Nivedha A. K, Anisha C, Anjana Sunilkumar K, Jilsha Shaji, Kamalini T
DOI Link: https://doi.org/10.22214/ijraset.2023.51417
Certificate: View Certificate
Abstract
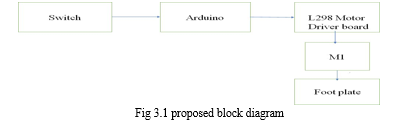
The design and development of the entire system, which includes an automatic device worn over the affected body part (such as the ankle) to assist with physical therapy exercises, has been successfully completed. The device is equipped with a Driver module and switches for setting the desired duration, and it stores the direction and speed of motion, which is periodically followed by the device. The Motion control feature ensures safe and accurate movement within set limits. The switches send speed and angle inputs to an On-board Micro-controller, which analyzes the data and repeats the action based on a predetermined algorithm. A high-torque DC-Gear motor controls the mechanical axes of the device.
Introduction
I. INTRODUCTION
A stroke is a serious medical emergency that occurs when there is a blockage or a bleed in the blood vessels that supply the brain with oxygen and nutrients. When the brain does not receive enough oxygen, brain cells start to die, which can cause lasting brain damage, long-term disability, or even death. There are two main types of stroke: ischemic stroke and hemorrhagic stroke. Ischemic stroke occurs when a blood clot blocks a blood vessel in the brain. This is the most common type of stroke, accounting for around 87% of all strokes.
Hemorrhagic stroke occurs when a blood vessel in the brain ruptures and causes bleeding in or around the brain. This type of stroke is less common but is more likely to result in disability or death. Some common symptoms of stroke include sudden weakness or numbness in the face, arm, or leg (especially on one side of the body), sudden confusion, trouble speaking or understanding speech, sudden vision loss or double vision, sudden severe headache with no known cause, and dizziness or loss of balance. If you or someone you know experiences any of these symptoms, it is important to call for emergency medical assistance immediately. Treatment for stroke depends on the type and severity of the stroke.
If the stroke is caused by a blood clot, a medication called tissue plasminogen activator (tPA) may be given to dissolve the clot and restore blood flow to the brain. In some cases, a procedure called mechanical thrombectomy may be performed to remove the clot using a catheter. If the stroke is caused by bleeding in the brain, surgery may be needed to stop the bleeding and repair the blood vessels. Recovery from a stroke can be a long process, and rehabilitation is often necessary to help patients regain lost abilities and learn new ways of performing tasks.
Rehabilitation may include physical therapy, occupational therapy, speech therapy, and psychological counseling. Lifestyle changes, such as quitting smoking, maintaining a healthy diet, and exercising regularly, may also be recommended to reduce the risk of having another stroke.
II. EXISTING SYSTEM
The theory of brain plasticity and functional reorganization suggests that early training is crucial for function rehabilitation. It is generally believed that to restore motor function in patients with hemiplegia, rehabilitation should begin within a few days to one to three months after the onset of hemiplegia, as this is when the greatest recovery can be achieved. In addition to drug treatment, early rehabilitation training is also important for hemiplegic patients.
Hemiplegia can result in body cooperates, primitive postural reflexes, and limited joint movement, which are normal in early motor development. Patients must go through several stages in the rehabilitation process, and targeted early rehabilitation training has a significant effect on hemiplegia recovery. To prepare for rehabilitation, it is important to be aware of the symptoms of ankle hemiplegia, such as foot drop and steppage gait. Foot drop occurs when the tibialis anterior muscle neural control is lost, leading to an inability to maintain the ankle in a normal position.
A. Disadvantage
The current ankle rehabilitation methods have some limitations, including lack of rigidity, limited range of motion, and complexity of the design. Ankle exoskeletons are also inconvenient to wear and only suitable for patients who can walk. To overcome these issues, this paper proposes a new ankle rehabilitation robot with three degrees of freedom that can be used while sitting or lying down. This robot combines active and passive training to make the rehabilitation process more effective. Additionally, the ankle robot has a simple design and high rigidity, making it more practical and stable.
III. PROPOSED SYSTEM
The proposed system is a physiotherapy device that is designed to assist in the rehabilitation of post-stroke paralysis and ankle injury patients. The aim of the device is to improve the patient's mobility, coordination, and strength through targeted exercises. The device is specifically designed to be easy to use, efficient, and cost-effective. The device consists of two main components: a set of sensors and a control unit. The sensors are placed on the patient's affected limb, either the hand or ankle, and are used to monitor the patient's movement and provide feedback to the control unit. The control unit is responsible for processing the sensor data and providing real-time feedback to the patient, as well as controlling the device's movement. The device is designed to provide both passive and active exercises to the patient. The passive exercise mode involves the device moving the patient's limb through a predetermined range of motion to promote flexibility and reduce muscle tension. The active exercise mode requires the patient to move their limb against resistance provided by the device to build strength and coordination. The device is designed to be adjustable, so it can be adapted to the patient's specific needs and progress. The device's software can be modified to change the exercise program, and the resistance can be adjusted to increase or decrease the difficulty of the exercises. Additionally, the device's sensors can provide feedback to the patient and therapist on the patient's progress, which can be used to adjust the treatment plan.
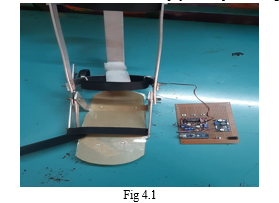
IV. RESULTS
The automatic physiotherapy device is designed to help patients who have suffered ankle injuries by providing them with exercises that can help to regain strength and flexibility in the ankle joint. The device has 3 different rotations, which can operate at 125 rpm, 175 rpm, and 255 rpm, and each rotation has an interval of 15 seconds. The rotation movement provides plantar flexion and dorsiflexion exercises to the ankle joint, which helps to increase the range of motion of the joint.The repeated exercises performed by the device can help to strengthen the muscles in the ankle and improve the patient's ability to move the joint normally. This can lead to better mobility and a reduction in pain and discomfort associated with the ankle injury. The device operates automatically, making it easy for patients to use without the need for assistance from a physiotherapist or caregiver.
Conclusion
The importance of human recovery in medical engineering cannot be overstated, and universities around the world are actively seeking better devices to aid in this task. One area of focus is the human ankle, which is a commonly injured area of the body. However, existing solutions on the market are often not ideal due to their high cost, large size, or complexity. In order for an ankle rehabilitation device to be effective, it must be portable, easily accessible for daily use, and able to operate for extended periods of time. Given these requirements, new designs for ankle rehabilitation devices are being proposed and analyzed in future work. These designs will build upon the current state of the art and aim to improve upon the limitations of existing devices. By developing more accessible and user-friendly ankle rehabilitation devices, it is hoped that patients will be better equipped to recover from ankle injuries and improve their overall quality of life.
References
[1] D. P. Ferris, “The exoskeletons are here,” J. NeuroEng. Rehabil., vol. 6,no. 1, pp. 1–3, Dec. 2009. [2] J. R. Koller, D. H. Gates, D. P. Ferris, and C. D. Remy, “‘Body-in-theloop’ optimization of assistive robotic devices: A validation study,” inProc. Robot., Sci. Syst., Ann Arbor, MI, USA, 2016, pp. 1–10. [3] C. Walsh, “Human-in-the-loop development of soft wearable robots,”Nature Rev. Mater., vol. 3, no. 6, pp. 78–80, Jun. 2018. [4] J. Zhang et al., “Human-in-the-loop optimization of exoskeleton assistance during walking,” Science, vol. 356, no. 6344, pp. 1280–1284,Jun. 2017. [5] P. Malcolm, W. Derave, S. Galle, and D. D. Clercq, “A simple exoskeleton that assists plantarflexion can reduce the metabolic cost of humanwalking,” PLoS ONE, vol. 8… [6] M. E. Mungai and J. W. Grizzle, “Feedback control design for robustcomfortable sit-to-stand motions of 3D lower-limb exoskeletons,” IEEEAccess, vol. 9, pp. 122–161, 2021. [7] K. E. Gordon and D. P. Ferris, “Learning to walk with a robotic ankleexoskeleton,” J. Biomech., vol. 40, no. 12, pp. 2636–2644, 2007. [8] K. L. Poggensee and S. H. Collins, “How adaptation, training, andcustomization contribute to benefits from exoskeleton assistance,” Sci.Robot., vol. 6, no. 58, Sep. 2021, Art. no. eabf1078. [9] H.-B. Kang and J.-H. Wang, “Adaptive control of 5 DOF upper-limb exoskeleton robot with improved safety,” ISA Trans., vol. 52, no. 6,pp. 844–852, Nov. 2013. [10] S. Hasan and A. K. Dhingra, “An adaptive controller for humanlower extremity exoskeleton robot,” Microsyst. Technol., vol. 27, no. 7,pp. 2829–2846, 2021. [11] A. Belkadi, H. Oulhadj, Y. Touati, S. A. Khan, and B. Daachi, “On therobust PID adaptive controller for exoskeletons: A particle swarmoptimization based approach,” Appl. Soft Comput., vol. 60, pp. 87–100,Nov. 2017
Copyright
Copyright © 2023 Nivedha A. K, Anisha C, Anjana Sunilkumar K, Jilsha Shaji, Kamalini T. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET51417
Publish Date : 2023-05-02
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online