

Ijraset Journal For Research in Applied Science and Engineering Technology
Implementation of Bootstrap Technique in Detection of Road Sign Using Artificial Intelligence
Authors: Gulzar Ahmad Wani, Dr. Gurinder Kaur Sodhi
DOI Link: https://doi.org/10.22214/ijraset.2022.48459
Certificate: View Certificate
Abstract
In today\'s world, automated tasks have made nearly everything we perform simpler. In an endeavour to concentrate on the road, drivers frequently overlook signs on the side of a road, which might be dangerous for them and nearby motorists. If there was an rapid means to inform the driver before causing them to change their focus, this problem may be avoided. If TSDR (Traffic Sign Detection and Recognition) identifies and understands signs in this circumstance, it may warn the driver of any impending signs. This not only ensures traffic safety, but also gives the driver peace of mind when traveling through uncharted or challenging roads. Not being able to interpret the sign\'s meaning is another significant problem. (Traffic Sign Recognition), which is a crucial element of modern driver assistance systems that contributes to driver safety, autonomous vehicle safety, and increased driving comfort. In comparison to previous decades, road conditions have vastly improved in today\'s globe. The vehicle\'s speed obviously increased. As a result, there may be opportunities for drivers to disregard necessary traffic signs while driving. This study investigates a systemIt helps drivers see traffic signs and prevent tragedies. TSR is a difficult process, and its accuracy is dependent on two factors: the feature extractor and the classifier.. To do both feature extraction and classification, most current popular algorithms use CNN (Convolutional Neural Network). In this work, we use CNN to the recognition of traffic signs. 43 unique traffic datasets will be used to build the CNN. Sign classes, as well as the TensorFlow library. The findings will indicate a 95% accuracy rate
Introduction
I. Introduction
An appraisal of all road and traffic signs is necessary to ensure that they are updated and kept in good working order. They must be appropriately constructed in the required locations. Meetings with Swedish and Scottish transportation officials revealed that there is no inventory of traffic signs, despite the need for one. An automated approach for detecting and recognizing traffic signs can significantly help achieve this goal by providing a quick manner of identifying, classifying, and recording signs. This method assists in the accurate and regular growth of the stockpile. After that, it will be simpler for operator to notice indicators that are distorted or blocked. Investigation on the interpretation of road and traffic signs can assist in the development of an inventory control (which does not need real-time interpretation) or an in-car advising system. Road sign identify and road sign stockpile both concern themselves with traffic signs, deal with related issues, and rely on artificial classification and tracking. Theoretically, an ITS (Intelligent Transport Systems) might include a road and traffic sign classification method that updates the driver, vehicle, and road in order to, for instances, alert the driver of impending strategic options in real-time.
Intelligent transportation systems employ modern communication technology to improve transportation efficiency, road safety, and minimize environmental impact
Automatic TSR has piqued interest in recent years as a crucial challenge of Advanced Driver Assistance Systems and The road signs will either be placed above the road or alongside it, according to ITS. These signs provide drivers with the relevant paperwork to direct, caution, and control their behavior, resulting in safer and simpler navigation. There are TSR such as speed limits, no entering, traffic signals, turn left or right, children crossing, and no movement of huge vehicles. Designation is the method of figuring out which grade a traffic sign belongs in.Driver safety is directly impacted by TSR, and harm may be readily done as a result of their incompetence. Based on the recognition and analysis of indicators that fix the most hazardous driving behaviors, connected car tools are being created.
Advanced safety systems are made to gather vital information for drivers, reducing their work as they drive securely. So drivers need to pay attention to several things, including vehicle speed and inclination, driving slowly, and many others.
As a result, collecting such data by driver assistance systems will considerably lessen the strain on drivers. Road signs are therefore made with colors and basic geometric patterns to grab the attention of drivers.
The amount of study on traffic sign recognition for local roads is limited and remains in its early stages. It still largely focuses on identifying speed limit signs on roads.in its early stages, focusing on the recognition of traffic signs using static pictures..
Algorithms were created in the "Anaconda" environment to detect traffic signs while cars were in motion in this study. The project's main goal is to employ image clips to record automated recognition of warning signs put on local highways. The geometrical qualities and color information on traffic signs were used to identify them (2010) Gunawardana In this homework, I build a deep neural system (NN) structure that can organize the speed limit signs in an imagery into several categories. We can read and comprehend traffic signs using our model, which is a critical task for autonomous cars.
A. Modernized Automatic Braking Technologies
Advanced Driver Assistance Systems (ADAS) are devices that aim to provide users with essential information about roads and traffic conditions, take control of some difficult or repetitive tasks, and generally increase the safety of cars and cyclists. 94 percent of car accidents are caused by human mistake, according to the National Highway Safety Administration (NHTSA) [7].The most common driver-related significant reasons for accidents are recognition mistakes, judgment errors, and performance errors, among all conceivable categories of driving faults. Based on our findings, we believe there should be a substantial incentive to create and use innovation that lessens and stops tragedies. Automatic Driver Assist Technologies (ADAS) are constantly included in automotive.
In the last two decades, several ADAS have been presented. For instance, Gps system is the most widely utilized technique and has been around since the 1990s. Other technologies including adaptive lights, autonomous braking, automated parking, emergency braking, blind spot identification, driver fatigue monitoring, hill descend influence, night vision, and lane departure caution have also been developed. Developed in recent years. These devices are designed to make roadways safer for both automobiles and pedestrians. These systems, on the other hand, pay almost minimal attention to the driver's forms of conduct. Constructing and deploying a Traffic Sign Detection and Recognition system will help us demonstrate in this thesis that vehicle gaze conduct is a critical component of safety (TSDR) approach that can alert drivers if they have not noticed specific traffic signals.
B. Research Overview
Over the last few years, TSDR has received a lot of attentions strategies are designed to warn drivers of impending traffic signs on the road as well as potential dangers and issues. Traffic signs provide essential visual details to motorists such as road rules, street closures, directions, duration to destinations, and harmful or unusual conditions [8]. It makes sense to assume that icy roads will worsen if a driver misses a stop sign or doesn't comprehend the facts on it. The driver can benefit greatly from a TSDR system.in mitigating this risk by detecting and identifying certain traffic signs..
The capacity of anThese days, self-driving cars are attracting considerable interest. The ability of a self-driving car to recognize traffic signs is one of many essential aspects that protects the safe and secure environment of individuals within and outside the transport. The major objectives of the many components that make up the driving environment are to regulate traffic flow and guarantee that all motorists obey the law in order to maintain a reliable and protected manner for all concerned parties.My project is centered on German traffic signs.. There were 43 different types of German traffic signs in the dataset. The majority of the frames were in grayscale, with the remainder in color. Because traffic signs are unique, item variances are modest, and traffic signs are plainly visible to the driver/system, the problem we're seeking to address offers certain benefits.
Automobiles have become an integral method due to the quick growth of commerce and engineering in contemporary civilisation, of transit in people's daily travel. Although the increasing use of automobiles has brought about a great deal of ease for users, additionally it has led to a number of traffic safety problems that must not be ignored, such as heavy traffic and regular mishaps on the roads. On the other side, we must contend with lighting and weather patterns [1]. Our project's main objective is to design and construct a computer-based system that is capable of identify traffic signs and provide instructions to the user or device so that they may respond appropriately. Convolutional neural networks are used to build a model, and color data is used to extract traffic indications from images in the recommended approach. Traffic signs were classified using convolutional neural networks (CNN), and signs were extracted from pictures using color-based segmented.
In order to liberate the human body and lower the danger of collisions, self-driving technology may assist or even accomplish the driving action entirely [6,7]. Since they directly affect the driving habits are executed, traffic sign detection and recognition are crucial in the creation of intelligence automobiles.
The effect and safety of driver assistance systems are vastly expanded by smart cars, which use a driver camera to obtain accurate and reliable road traffic reports.
Smart cars can also identify and comprehend speed limit signs in real time in normal road sequences should provide correct code output and nice joysticks for autonomous traffic [8–10]. Consequently, a thorough inquiry is needed.
There are often two steps in the process of recognizing traffic signs:
- traffic sign detection
- recognition
However, in natural environments, changes in lighting, a variety of backgrounds, and the age of signs have made it difficult to identify traffic signs effectively. Due to the rapid improvement in computer operation efficiency, many experts and scientists have focused on the street sign classification, which is divided into traffic sign detection and classification technologies [11–14]. Technology for detecting traffic signs extracts potential traffic sign positions from real-world road scenes using core data such as the colour, structure, and surface of the signs..
II. Literature review
Has aFlayed [19] devised a different method based on fuzzy sets for colour recognition and traffic sign division? RGB images were taken using a video recorder placed on a car, and after that, they were converted to HSV images. Then, they were divided using a set of fuzzy criteria according to the hue and saturate indices of each pixel in the HSV colour space. Per the [20], the Descriptor is appropriate for region detection since its Hue portion is not affected by variations in luminance.
Sun et al. [20] introduced an extreme learning machine (ELM)-based traffic sign categorization approach, which is a supervised learning algorithm linked to machine learning techniques. The parameters were modest and the training period was quick because just one hidden layer was seen Based on the calculations findings, the algorithm classified traffic signs, and by selecting a certain number of features, it was able to attain a high precision and recall.
III. methodology
A. Background
The availability of any system for detecting and identifying traffic signs must also have a collection. In order to train and evaluate a detect for detecting an object with a variety of attributes and algorithms, we need access to a significant number of data of that object. Over the past few years, a number of research teams have been developing street sign archives for recognition, classification, and surveillance.. Some of these datasets are freely accessible to the scientific community. Some of these datasets are described in the table below.
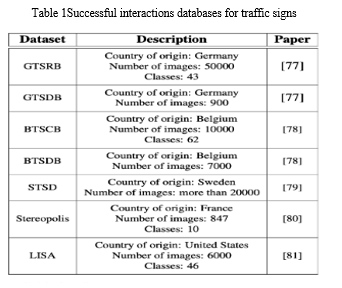
One of the best-known and often used datasets for detection and classification is the Belgian Traffic Sign (BTS) collection, which contains data from both the German and Belgian traffic signs (GTS). The German Traffic Sign Recognition Benchmark (GTSRB) and Belgian Traffic Sign Taxonomy Average allow for both detection and identification (BTSCB).
B. Variance Comparing European and North American Signage

Different nations' traffic signs have different perspectives, colours, and forms. For instance, the form of traffic signs in North America and Europe are vastly different. Speed limit signage are the primary distinction between the two traffic regimes.

North American speed limit signs are rectangular in design, but European speed limit signs are circular. The hue of signage is another significant variation. The While speed restriction signs in Usa are entirely white with a black border, those already in Europe are white with a red circular demarcation line. Figure 3.2 displays examples of speed limit signs from North America and Europe. In North America, there are significant traffic signs that have the same shape and color as speed signs, such as different regulating and Limited Parking Vehicle (HOV) signs. While it is now possible to see and understand European traffic signs, North American traffic signs remain challenging.Still have a long way to go.. In the previous Chapter, we looked at the main suggested approaches for detecting and recognizing European signs and discovered that several researchers had Results for classification on the GTSDB were great and precise. The finding of a North American sign, nevertheless, tells a different story. If we apply the same approach for identifying European signs on North American lettering, we won't get the same detection performance. This is due to the different architectural designs of the two transport modes. For instance, colour edge detection, which was frequently used in the segmentation of many European signs ineffective for segmenting North American speed limit signsColor segmentation algorithms are unable to differentiate speed limit signs from other objects because they lack color to stand out from the backdrop. As a result, we might consider the majority of North American traffic signs to be difficult detection instances. As a result, we may infer that the problem of traffic sign detection is not totally solved..
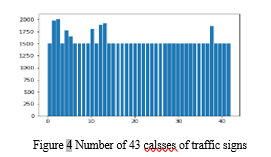
The 2011 International Joint Conference on Neural Networks presented the German Traffic Sign Identification Criterion (GTSRB), which is employed in this study (IJCNN). The indoor traffic signs were gathered from the actual German road, and they have since gained popularity as a traffic sign database used by experts and researchers in video processing, inner, and other fields. 51,839 pictures total, divided into assessments and training sets, make up the GTSRB. A total of 39,209 and 12,630 images, or around 75% and 25% of the total, are present in the test and training sets, etc. There is just one caution sign in each image, and it is rarely in the center. The greatest and youngest photographs' image sizes are out of proportion. The traffic sign images in GTSRB were created using the video captured by the camera placed on the car. As shown in Figure 7, the GTSRB has 43 distinct types of street signs, with varying numbers of each type. Each type of traffic sign has its own database, which incorporates a single picture of several rails and a CSV file with a class identification (each track includes 30 images).
Using the information included in the different directions, GTSRB is split into six categories speed limit, hazard, necessary, and also other. The collection gets closer to the actual road scenes when numerous images, lighting settings, temperature fluctuations, occlusion degrees, tilt factors, and other shots are used in the same types of traffic signals.

For GTSRB, Image preparation must be followed by the creation of a fictitious datasets. Because the number of various traffic sign kinds in GTSRB varies, this scenario might simply lead to a discrepancy in the data collected. Various flow sign kinds have unique classification and classification traits, with an effect on how broadly the network design may be used. In order to construct a new fake sampled, a randomised sample is taken from the data set of each descriptive element associated with the same sample preparation. The outcome is the number in Figure 8. Examples of six different types of traffic signs. After image processing techniques, a synthetic set must be produced for GTSRB. Since the number of various traffic sign kinds in GTSRB varies, this situation might easily result in an imbalance in the sample. Different driving sign kinds have unique classification and recognition traits, which have an effect on how broadly the system model may be used. In order to construct a new fake sample, a random sample is collected from the value space from every attributes feature in the same sample type. To address the issue of imbalanced sample data, the amount of various traffic sign kinds is comparable to practicable. Figure 9 depicts the 43 traffic sign classes generated from the simulated dataset.
IV. System Architecture
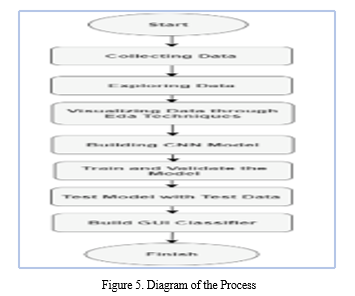
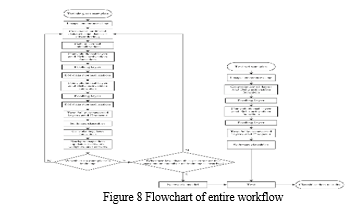
We first decided on data collecting. We used various data exploration tools and then used EDA techniques to display the data. Finally, in this work, we create a CNN-based classification model. After that, the model is trained and validated, and we attempt a test using the validated model. Following that, we implemented our classifier. As previously stated, we employed the CNN model for classification,which uses images or raw inputs and convolutional algorithms.
The CNN-based technique will be described in this section. Figure depicts a flowchart of the key stages.
One of the most crucial CNN subcategories for identifying and classifying images. CNN's image classifiers analyze an input sequence and group it into many categories (Eg., Dog, Cat, Tiger, Lion). Each input image is routed through a series of convolution layers employing filters (Kernals), Funneling, convolutions (FC), and the Svm calculation to discover an item with uncertain values ranging from zero to one in order to train and assess deep learning Cnn architectures.. Equation (1) shows how to simplify the calculation of the convolutional layer:
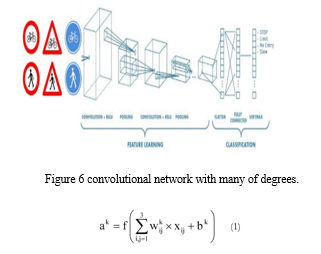
Where k wijij x is the total number of pixels value that equates to the mixture kernel's weight; k b is the bias; f () x is the algorithm; and is the muscle value of something like the kernel. CNN typically used receptive fields as an RLU (Rectified Linear Unit). The whole CNN procedure for interpreting an input photo and identifying entities based on its values is shown in Figure 2.
The Convolution Layer is the first layer to remove features from an input image. Interpolation preserves the connection of pixels by recognizing characteristic features from squares of input data. A techniques for assessing and a filter or kernel serve as its two signals in this mathematical approach.
Quel in ReLUReLU is an abbreviation for RLU for a non-linear calculation. Adding semi to our ConvNet is its main objective. We need our ConvNet to learn non - linear dynamic numbers since the real-world data demands it. The Pooling Layer decreases the number of parameters when the images are too large. Spatial pooling, sometimes referred to as sub-sampling or down-sampling, reduces each map's size while maintaining essential information. Spatial pooling can take several forms:
- Max Pooling
- Average Pooling
- Sum Pooling
Max pooling uses the largest component of the rectified feature map. The largest part may be used to figure the average pooled. The total of each component in a dataset is known as sum pooling.
The matrix is transformed into a vector and fed into a fully connected similar to how a NN is joined. We will convert the feature map matrix into a vector (x1, x2, x3, etc.). Using the completely connected layers, we created a model that incorporated these properties. Finally, the outputs are categorized as cat, dog, car, truck, etc. using an input vector like SoftMax or logistic. The next sections outline the particular steps of our method.
A. Data Preprocessing
We chose a publically accessible dataset from Kaggle for our project.The collection contains more than 50,000 details of different traffic lights. It is further broken down into 43 different groups. In Figure 3, a couple of them are shown. Testing a NN, data is split into train and test...

Each of the each of the 43 folders in the "train" folder corresponds to a different class. The folder contains numbers from 0 to 42. Using the OS component, we must loop through the sections and add images and descriptions to the dataset and name list. Each of the particles that make up an image is of which contains three color values (RGB) (Red, Green Blue). We transformed the image into numbers so that machines could interpret it. We utilize the PIL (Python Imaging Library) for this, which can do a variety of picture processing operations. The photos were then resized according to some standard parameters. As a result, we scale all of the photographs to a standard size, such as 30 by 30 pixels.Let's go into each class, open the photo with PIL, and change its size to 30x30. The X and Y rows will then be supplemented with the info and label, however. The data and values were converted into Arithmetic operations to feeding the model once all of the images and respective labels had been saved in arrays (data and labels). However, the database's shape is (39209, 30, 30, 3), suggesting that it consists of colored images and there are 39,209 photographs with a 30x30 pixel density (RGB Value).
B. Applying EDA Techniques
We separated the procedure into three parts in order to employ EDA methods. We initially concentrated on gaining a thorough knowledge of the dataset. After that, some data cleansing is done. EDA is the process of understanding and summarizing a dataset using visual and quantitative instead of assuming anything about its facts. It's crucial to do this before diving into mathematical or statistical learning simulation because that equips you with the knowledge you really ought to create a model that is indeed relevant for your circumstance and interpret its outcomes correctly. The next step was to look for any patterns in the collection.
- Step 1: Data analysis using columns the initial and last five items of the data set, along with their corresponding properties and statistics, are summarized in Tables 1-2. This information has 8 dimensions and 12630 rows. This indicates that there is enough data to support any Profound Teaching approach.
- Step 2: Cleaning the Data: After analyzing the data, null or missing values were analyzed further.
- Step 3: Relationship Analysis: The data is summarized using a correlation matrix as an input for more efficient statistical.
The heatmap provides a visual depiction of the correlation matrix. The heatmap is a two-dimensional (two-dimensional) representation of data. In the graph, the data values are represented by colors. The heatmap's purpose is to create a colorful visual overview of data. It's a graphical data style where the different colors used to represent a matrix's properties. Comparable to glancing on a data table upwards Data collection should be presented in a far more comprehensive manner than should individual data. Points.
V. Simulation and results
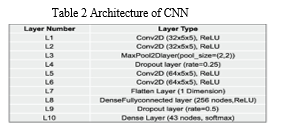
We built and trained to categorize the photos into their appropriate groups. The CNN has shown to be the state of the art in picture classification tasks, and we will use it in our model. Convolutional and pooling layers make up a CNN. The characteristics from the picture are retrieved at each layer, which aid in categorizing the image. Additionally, a dropout layer that manages the project scope of the system is added. The loss layer when education removes part of the neurons. Finally, because the dataset comprises many classes to be categorized, the model is built using cross entropy measurements. Table 2 illustrates the layers of the CNN model in detail, along with their parameters.
A. Training and Simulation Models
After building the layout of the object. The model is established, and or the data are prepared. We first should configure the learning algorithm, test sets, batch size, and time steps before we can start training our model. Therefore, we employed several Cnn model. For the classifier. We played around with different batch sizes and activation algorithms. All of our implemented models are detailed in Table 3
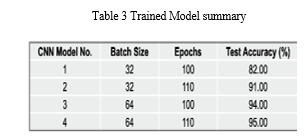
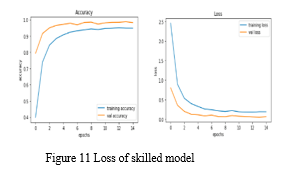
However, as we can see, CNN4 has outperformed the rest of the models. As a result, we used this model to expand on the linked demos. As a result, batch size 64 is employed to educate this system. In 110 epochs, the dependability remained constant. Our model obtained a 95% accuracy rate on the train set. The frequency and depreciation are displayed on the graph. Figures 6-7 show, separately, accuracy and loss.
Finally, for our traffic sign classifier, we create a graphical user interface. In order to prepare for the traffic sign, we must enter the same measurement we used so building the layout into the GUI (Graphical User Interface), which is meant for cover the rest. We will still save time by using an interactive graphical user interface to test and view the results of our predicted data.
We will request a photo from the user and then locate the story's file through the GUI database's gui. The classi?er is then used.Which takesdelivers the class within which the terms of the prevalence after accepting the visual as input.
B. Biostatistics and Experimentation Analysation
In order to assess the improved CNN network models thorough recognize capabilities for various sorts of traffic signs, a total of 1000 test images are chosen randomly for analysis and classification from five types of traffic signs specified roughly in the collection. Table 3shows the results of six different traffic sign categorization and identification tests..
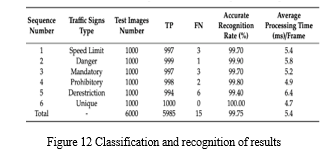
Table 3 reveals the number of test pictures for which highway signs are better words, although Table 3 also shows the number of training images for which traffic signs are mislabeled and disregarded. Customized traffic signs outperform other traffic signals in segmentation and identify trials due to the advantages of fixed geometries and differentiating traits. The computation per frame averages 4.7 milliseconds, and the identification accuracy rate is 100.00%. The derestriction highway signs perform the worst in the findings due to the restrictions of homogenous forms and identical traits... On the other hand, the reliability is 99.40%, and the time consumption each frame is generally 6.4 s. With an average time consumed of 5.4 nanosecond per frame, six specific kinds of traffic signs can be accurately identified 99.75 percent of the times. The proposed approach for identifying traffic signs has good elasticity and real-time effectiveness, and the improved LeNet-5 routing algorithm has excellent picture detection capability. Selection and analysis of false or missed test images reveal that confusion, substantial tilt, absurdly low definition, and very dark background are the main causes of false or incomplete test photos. In the future, sophisticated network models aiming at these difficulties will be developed, and more large datasets will be used to aid CNN's correct detection of additional traffic signals with interference elements. The inclusivity and stability of the traffic sign recognition system are continually enhanced in this way.
Conclusion
.An effective alert traffic sign detection was showed and designed identification system in this study. The identified traffic signs are classified using both the traffic signs\' color picture and their math characteristic. The test reveals that the software has a 95% classification performance, which is high. The technology delivers accurate findings in a variety of lighting settings, weather, day light temperatures, and vehicle speeds. With 95% recognition rate, the traffic sign encoder showed how our validity and loss change over time. Rather impressive for a basic CNN model. The methods utilized in this study can be used to the development of general-purpose, sophisticated intelligent traffic monitoring systems
References
[1] Eichberger, A.; Wallner, D. Review of recent patents in integrated vehicle safety, advanced driver assistance systems and intelligent transportation systems. Recent Pat. Mech. Eng. 2010, 3, 32–44. [2] Campbell, S.; Naeem, W.; Irwin, G.W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu. Rev. Control 2012, 36, 267–283. [CrossRef] [3] Olaverri-Monreal, C. Road safety: Human factors aspects of intelligent vehicle technologies. In Proceedings of the 6th International Conference on Smart Cities and Green ICT Systems, SMARTGREENS 2017 and 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS), Porto, Portugal, 22–24 April 2017; pp. 318–332. [4] Luo, Y.; Gao, Y.; You, Z.D. Overview research of influence of in-vehicle intelligent terminals on drivers’ distraction and driving safety. In Proceedings of the 17th COTA International Conference of Transportation Professionals: Transportation Reform and Change-Equity, Inclusiveness, Sharing, and Innovation (CICTP), Shanghai, China, 7–9 July 2017; pp. 4197–4205. [5] Andreev, S.; Petrov, V.; Huang, K.; Lema, M.A.; Dohler, M. Dense moving fog for intelligent IoT: Key challenges and opportunities. IEEE Commun. Mag. 2019, 57, 34–41. [CrossRef] [6] Yang, J.; Coughlin, J.F. In-vehicle technology for self-driving cars: Advantages and challenges for aging drivers. Int. J. Automot. Technol. 2014, 15, 333–340. [CrossRef] [7] Yoshida, H.; Omae, M.; Wada, T. Toward next active safety technology of intelligent vehicle. J. Robot. Mechatron. 2015, 27, 610–616. [CrossRef] [8] Zhang, Z.J.; Li, W.Q.; Zhang, D.; Zhang, W. A review on recognition of traffic signs. In Proceedings of the 2014 International Conference on E-Commerce, E-Business and E-Service (EEE), Hong Kong, China, 1–2 May 2014; pp. 139–144. [9] Gudigar, A.; Chokkadi, S.; Raghavendra, U. A review on automatic detection and recognition of traffic sign. Multimed. Tools Appl. 2016, 75, 333–364. [CrossRef] [10] Zhu, H.; Yuen, K.V.; Mihaylova, L.; Leung, H. Overview of environment perception for intelligent vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2584–2601. [CrossRef] [11] Yang, J.; Kong, B.; Wang, B. Vision-based traffic sign recognition system for intelligent vehicles. Adv. Intell. Syst. Comput. 2014, 215, 347–362. [12] Shi, J.H.; Lin, H.Y. A vision system for traffic sign detection and recognition. In Proceedings of the 26th IEEE International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 18–21 June 2017; pp. 1596–1601. [13] Phu, K.T.; LwinOo, L.L. Traffic sign recognition system using feature points. In Proceedings of the 12th International Conference on Research Challenges in Information Science (RCIS), Nantes, France, 29–31 May 2018; pp. 1–6. [14] Wali, S.B.; Abdullah, M.A.; Hannan, M.A.; Hussain, A.; Samad, S.A.; Ker, P.J.; Mansor, M.B. Vision-based traffic sign detection and recognition systems: Current trends and challenges. Sensors 2019, 19, 2093. [CrossRef] [15] Wang, G.Y.; Ren, G.H.; Jiang, L.H.; Quan, T.F. Hole-based traffic sign detection method for traffic signs with red rim. Vis. Comput. 2014, 30, 539–551. [CrossRef]
Copyright
Copyright © 2023 Gulzar Ahmad Wani, Dr. Gurinder Kaur Sodhi. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET48459
Publish Date : 2022-12-29
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online