

Ijraset Journal For Research in Applied Science and Engineering Technology
Building of Inmoov Robotic Arm for Performing Various Operations
Authors: Sumir Broota, Shubham Kulkarni, Anish Navale, Sanika Kshirsagar, Dr. Sanjesh Pawale
DOI Link: https://doi.org/10.22214/ijraset.2022.39804
Certificate: View Certificate
Abstract
‘Automation is the key in reducing the repetitive and banal tasks of everyday life’, the oft-quoted aphorism best portrays our effort at making a humanoid hand for tasks that require dexterity of fingers in situations where time and effort are of importance. The cost of human labor, quality of processes or products, time, and safety make this project a need of the hour. The research paper showcases our efforts of making a humanoid robotic arm. The body of the arm is composed of 3D printed parts. Servo Motors with nylon strings were used to control the fingers and the wrist. InMoov Nervo Board was used to control the servos. Worm Gear Mechanism was implemented to control the bicep movement and Worm Wheel is used for shoulder rotation. Machines can perform a wide range of functions without a considerable amount of human intervention. The future scope of Robotics and Automation would be to make a diverse and positive impact in industrial as well as research applications.
Introduction
I. INTRODUCTION
The hand is surely the most useful tool that humanity has been blessed with by nature. It can skillfully deal with even the most tedious of tasks that most machines would fail at. Over decades, there have been immense advances in technology that have paved the way to make robot arms that mimic the motion of a human hand. The arm we built focuses on efficiently carrying out all the tasks that a human arm can.
InMoov is an open-source life-size humanoid robot. We have used the InMoov robotic arm for this project because of it’s free to use license, customizability and the plenty of functional APIs available. It is also a cheaper option compared to the other robotic arms.[1]
The Inmov robotic hand controls 16 joints in the fingers(5 DOFs) using 0.7 mm nylon strings with 6 actuators(servo motors) which makes it great for grasping gestures.[7] This gives the robotic arm similar freedom to a human arm which is the most prominent objective, given the kind of applications that it will be serving.
The API’s we use to program the arm for different applications are from MyRobotLab (MRL), an open source software developed by many volunteers. It makes working with Arduino, servos, cameras and other hardware easier than writing all the code from scratch.
Humanoid robotic arms are the most complex yet the most useful component in life-size humanoid robots. As can be imagined, they serve a wide array of applications, ranging from the simplest task a human arm can perform- picking and placing an object, to the most complex tasks like writing or typing. [3, 8]
II. DESIGN AND FABRICATION
Here, the materials we have used comprise of the 3D printed parts of the arm and the electronic components used to make the arm functional. Hence, we will discuss them in different sections, along with the reasons for use/challenges faced. [8]
A. Electronic Components
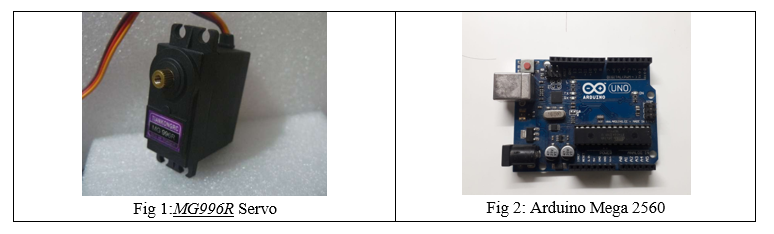
- Servo motors(Fig 1): We use 6 MG996R servo motors in the forearm. 5 for finger actuation with the help of nylon strings and 1 for wrist actuation with the help of gears. The servo motors used for finger actuation rest inside a “servo bed” which is present in the forearm. They are used to control finger movement(one motor for each finger). The nylon strings connected to the fingers are strapped to the servo pulley at the top of the respective servo motors which are then programmed using Arduino to rotate at given angles, hence causing tension in the nylon strings attached to the fingers and the wrist, ultimately leading to finger and wrist movements.
- We use 4 FT5335M servo motors in the upper arm for shoulder actuation. 1 servo motor is present in the bicep, which is used for the “bicep curling” action. The other 3 servo motors that are present above the bicep are used for “rotation”, “lateral” and “arm lifting” movements respectively.
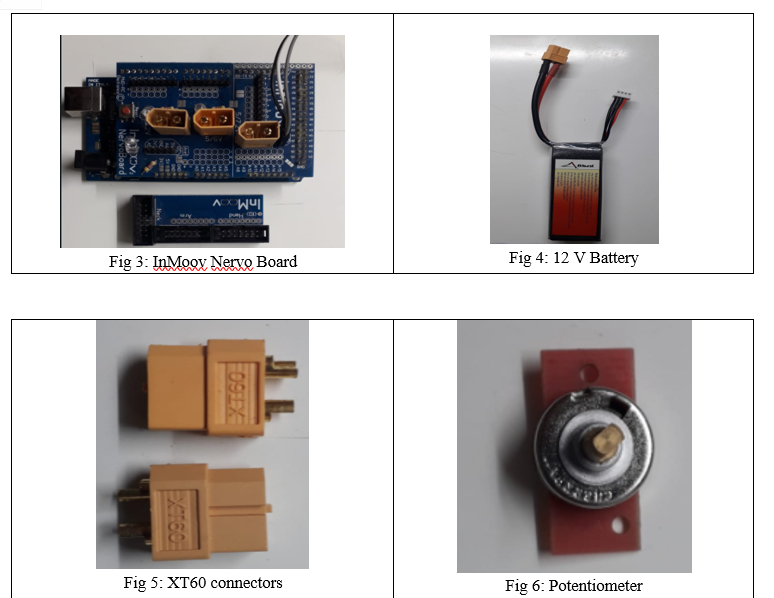
- Arduino board(Fig 2): We have used the Arduino Mega 2560, whichis a high performance, low power 8-bit microcontroller board based on the ATmega2560. It has 54 digital input/output pins (of which 15 can be used as PWM outputs), a USB connection, a power jack, a 16 MHz crystal oscillator, 16 analog inputs, 4 UARTs (hardware serial ports), an ICSP header, and a reset button. It features 4kb (4096 bytes) of non volatile electrically erasable programmable read-only memory.
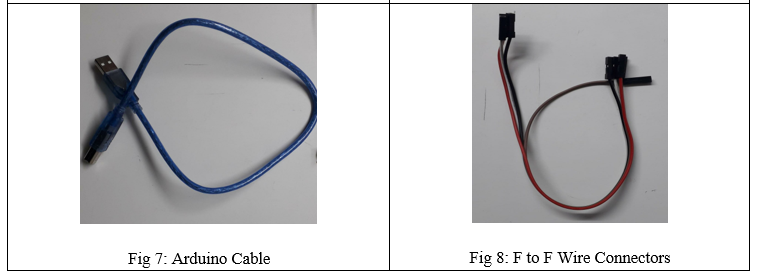
- Inmoov Nervo board(Fig 3): We use the Inmoov Nervo Board to connect all of the servo motors to the power supply and to the Arduino board in order to program them.
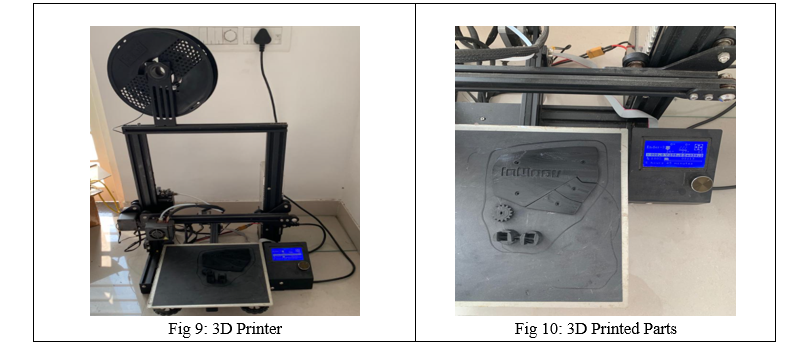
- Battery(Fig 4): We use a 12V battery to power the bicep and the shoulder. Also, we use a 12V battery with a step down buck converter to power the forearm with 5 Volts. The operating voltage of the bicep and shoulder is 12 Volts and that of the forearm is 5-6 Volts.
- Battery Connectors(XT60 connectors)(Fig 5): We use 2 XT60 connectors for the Nervo to power servo motors with different voltages.
- Potentiometer(Fig 6): We use 3 potentiometers in the bicep/shoulder region, to read the position of each motor which corresponds to different motions of the arm. Since the potentiometer top will rotate with the arm body, it will measure the voltage across different positions of the arm, we will be able to determine the current position in terms of degrees from the different voltage values.
- USB connector(Fig 7): We use this to connect the Arduino board to the laptop to program the arm.
- Wire Connectors(Fig 8): We use F to F wire connectors to connect the servos to the Inmoov Nervo board.
B. 3D printed parts
We had to print the 3D printed parts(Fig 10) for the InMoov arm ourselves. As a more economical option, we decided to borrow a printer(Fig 9), as printing so many parts from a printing service can be quite expensive. We obtained the designs for all the components from the InMoov website. Since, the entire arm is 3D printed, it included a lot of components like the joints, bearings, gears and casings for different parts of the arm. More 3D printed parts mentioned in the Assembly Challenges Section.
C. Other Materials Used
- Silicon artificial finger tips: The silicon fingertips were used to cover the PLA fingertips for a more efficient and gentle grip.
- Nylon wire: We use Nylon wires to connect the servos to different joints inside the arm- fingers, wrist, elbow, etc.
- Screws: We have used a number of screws of different sizes to fix different components of the arm along with the shells/covers of the hand, forearm and bicep.
- Superglue: Since we needed a more firm build, we have used Superglue to fit the arm covers along with the screws.
- Sandpaper: We had to use sandpaper to carefully file some of the 3D printed parts as they didn’t fit with the others accurately.
- Electronic tape: We have used electronic tape along with screws to fit the arm covers for more safety.
- Soldering gun and Solder: The soldering gun and solder was used to solder and fix the wires permanently on certain electronic components like the potentiometer.
III. ASSEMBLY CHALLENGES
The process for the assembly of the arm can be broken down into two main categories. They are mainly Hand with Forearm and Bicep.
a. Hand and Forearm
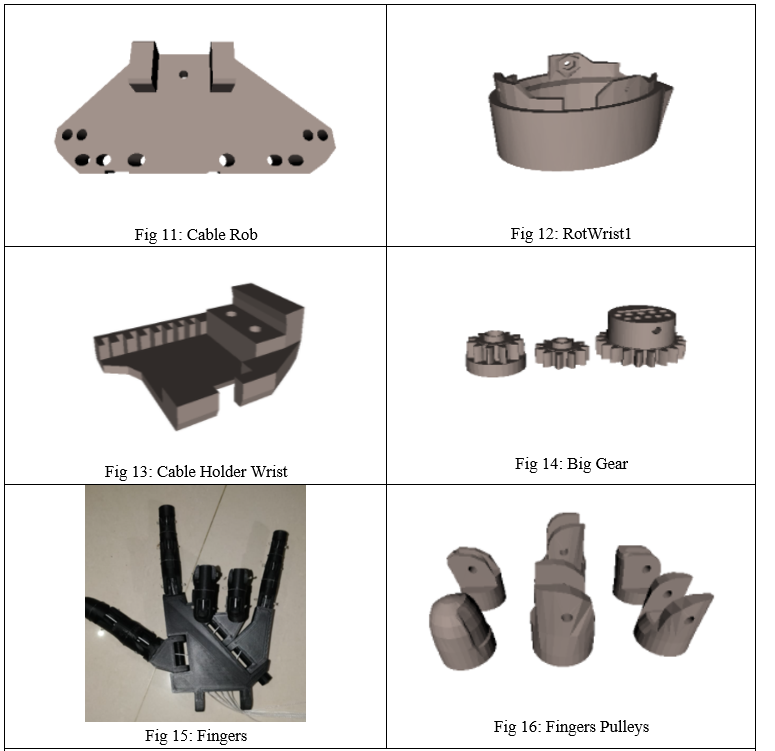
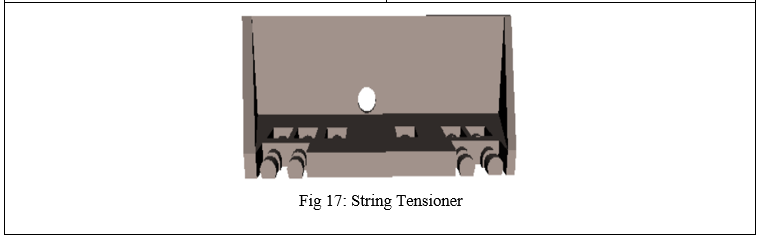
- Basic Assembly: The main aim in the hand was routing the nylon thread for the fingers through the entire body of the hand. They must be routed through from the servo motor pulley wheel to the cable rob (Fig 11), passing through the string tensioner and then passing through the rotwrist1(Fig 12) via the cable holder wrist (Fig 13). The threads exit the forearm through the BigGear (Fig 14) towards the palm. After threading the lines through each of the palms' respective holes for each finger(Fig 15),one must thread them through the finger- each side of the thread passes through different ends of the finger's pulleys (Fig 16). Then we return the thread in the opposite direction, tying to it the pulley, keeping the string taut.
- Challenges : The main challenges we faced in this process were passing the threads correctly through the forearm without inverting them as it would cause the fingers to move in the opposite direction. Often the brittle 3D printed parts would crack due to even the slightest pressure. A significant effort went into making sure the 3D parts would fit each other perfectly - the main culprit being the forearm outer body with it’s curved shape. Often the motors hindered the arm body from closing, requiring us to file the inside curve of the forearm body panel, also screwing the servo top pulley deep into the servo motor with a drill machine on low speed just to meet the height requirement for the forearm body. Additionally, the power requirement for motors required a step down board with decent headroom for the max amperage of all 5 active fingers. Acquiring electronic components such as motors were challenging during the peak of the pandemic.
B. Arm (Bicep)

- Basic Assembly: The upper arm assembly starts by attaching supports HighArmSide and LowArmSide (Fig 18) to the base RotMitV2 (Fig 19). This base then gets attached over the RotGearV6 (Fig 20) that works in a worm wheel pulley configuration to allow for rotation and lateral movement with the shoulder attachment. The bicep then gets attached via the forearm and through the pistonBaseAntiClock (Fig 21) with the pistonAntiClock (Fig 22) attached to its head. This piston passes through the hollow portion of RotMit base when the bicep is curled completely. To note the positions of the 3d printed arm we modify the shoulder and bicep servos, starting by opening up the servos and desoldering the potentiometers. The potentiometer wires are then extended out of the body of the servo and extended to the PLA divot in the arm body where it is to be re-attached with the potentiometers (Fig [18,19]).
- Challenges: Here the biggest issue by far was the fitment of the panels. We often had to hammer down on the 3D printed parts, which is obviously not advisable, considering the strength of the printed parts. The 3D printed spiral gears and bolts were also a huge challenge in 3D printing. They didn’t always fit well, requiring us to carefully file only particular parts of the gears to allow the best fit and not loosen the gear elsewhere. Fitting the ball bearings into the shoulder plate was another challenge in itself. They were a requirement for the gears but if they weren’t aligned as needed, they would cause the ball bearings to vibrate and fall out. In the end we had to reprint the whole worm wheel gear. The motors were very powerful, and the slightest bit of incorrect movement broke parts and solder, especially the bicep pot solder. Also if the potentiometer was incorrectly placed it would limit movement of the arm. Depending on the availability modifying certain stl files to allow different motors to be placed was another limitation (covid caused motor accessibility issues) but the open source concept allowed for easy editing. Some other issues that we faced were the glitches in the MyRobotLab and voice commands only working on Chrome browser. [3]
IV. LIMITATIONS
As there are many possible advantages and applications of a humanoid robot arm, they come with quite a few limitations. Although there are certain applications like prosthetics that exclusively require humanoid robotic arms, there are a wide range of simple applications which don’t necessarily need them. Consider, for instance, a robot arm whose ONLY purpose is to pick and place packages. This arm need not have five human-like fingers to get the job done as developing it would be needlessly expensive, a better focus would be the weight capacity that the robot can handle for such a purpose.
Humanoid robotic arms are known and meant to do complex tasks, which in itself speaks for how complex the design and hardware of them can be. A lot of joints and belts/strings are used for the actuation of the fingers and arms. These components, if used for stressful applications (weight/tension/pressure) can often be points to failure in the system. Humanoid arms have several more such complicated points of failure than specific-for-task bots. The maintenance and replacement of any of these crucial components inside the arm is very complex and time-consuming. Since all parts of our arm happen to be so interconnected, every time a tiny string/belt, servo or a 3D printed part needs to be fixed or replaced, a large part of the arm might need to be opened up and adjusted because of the new fittings.
Since our arm is entirely 3D printed, it doesn’t have the strength to withhold more than 5 KGs of weight. Hence applications that involve dealing with objects having weights larger than the mentioned amount are not possible with the arm. Also, the fingers used in the arm are flooded with various strings connected to their respective servos, this is a very crucial yet vulnerable part of the arm as the fingers are entirely made up of several small 3D printed components. In case of very high tension in the nylon strings actuating the fingers may break, replacing which is a highly time consuming task as one has to run the new string throughout the entire forearm body. Additionally under stress the tiny 3D printed finger parts are at a risk of breakage, printing these parts again to fix the arm can be quite costly.
V. RELATED WORK
There have been several applications of humanoid robotic arms in various industries, majorly in prosthetics. Some of the related works that are relevant or similar to our goal, along with their purpose and conclusion are listed below.
A. An Open Source 3D printed robot with a Parallel Spherical Joint Wrist for Sign Languages Reproduction
A 3D-printable dexterous anthropomorphic robotic hand was specifically designed to reproduce Sign Languages’ hand poses for deaf and deaf-blind users. The InMoov hand was improved, enhancing dexterity by adding adduction DOFs of three fingers (thumb, index and middle fingers) and a 3 DOF parallel spherical joint wrist. Systematic kinematic analysis was provided and it was done using the PARLOMA project’s framework which aims at developing a telecommunication system for deaf-blind people, by enabling transmission of hand signs from Sign Languages. [3, 4, 8]
B. Prototyping a Humanoid Robot as Speech-to-Sign Language Translator
This work also focuses on research on whether a humanoid arm can successfully be used for sign language translation. Two 3D-printed two arms of a humanoid robot, InMoov, with special joints for the index finger and thumb that would provide it with additional DOFs to express sign language were printed by the authors. The arm takes speech in the German language as input and then maps it with the corresponding hand sign and performs them in order of the inputs. [6]
C. Grasping Ability and Motion Synergies in Affordable Tendon-Driven Prosthetic Hands Controlled by Able-Bodied Subjects
This was a study on making low cost 3D printed humanoid arms assess the functionality and motion synergies of different tendon-driven hands using an able-bodied adaptor. The use of this adaptor makes it possible to take advantage of the human brain control while being able to obtain the synergies directly from the robotic hand. In this project, four artificial hands - InMoov, IMMA, Dextrus v2.0, Limbitless were used to tackle the Anthropomorphic Hand Assessment Protocol, quantifying the functionality and the ability for human-like grasping. This project showed that the authors were able to study how the different factors in the humanoid robotic arm like friction coefficient of the hand contact surfaces, limitations on the underactuation, and impairments for a correct thumb opposition affect the grasping motion and that they need to be improved.[5]
VI. ACKNOWLEDGEMENT
We would like to extend our gratitude to Asst Prof. Sanjesh Pawale for his guidance and his valuable and constructive suggestions during the course of this project. We would also like to thank Asst Prof. Noshir Tarapore for his assistance in keeping our project on schedule.We would like to express great appreciation towards our dear friend Idris Presswala for his contribution in the making of the base of the arm. We would like to offer special thanks to Priyanshu Parekh for lending us his 3D printer and saving us the time and money for printing the components of the arm. Lastly, we would like to thank the Design department of Vishwakarma University for enabling us to visit and use their lab.
Conclusion
The arm was successfully able to perform basic pick and place applications after coding it, with several tweaks along the way using trial and error. We observed that the arm carried out the given tasks efficiently and accurately. We could successfully configure and use MyRobotLab’s TTS API for voice recognition commands. The process of 3D printing the arm and connecting the parts together seemed easy and fun in the beginning, but we faced several hurdles like constant breakage of delicate parts, the need to file some parts very carefully for them to fit just right. Nevertheless, we ended up successfully building a functional humanoid robotic arm and programming it to do the tasks as we ask it to. Thus, we can say that our arm can be effectively programmed to do more complex tasks than the ones we have implemented. There are multiple probable advances that could lead the arm to potentially help out in a wider array of industrial applications.[2] With just a camera and distance sensors added for perception, the arm could administer vaccine doses to humans in a booth with supporting equipment that prop the arm, effectively and correctly, making the vaccination process almost entirely automated. Automated vaccine booths could be very helpful, reducing all human error when manually injecting the vaccine while also being a more economical and safer solution than employing nurses just to administer vaccines. This could save a lot of human effort in hectic situations like the current pandemic. Even though we have advanced in terms of automating all labor intensive processes with large machines, garbage separation is still commonly done by humans at waste treatment plants. Workers will sort objects such as branches, sticks, quilts, stones, bottles, etc. from a conveyor belt and then send these items for further screening and recycling. Using a humanoid robotic arm coupled with cameras and sensors for this purpose could potentially rule out the need of any manual labor. A humanoid robot arm when coupled with AI can even sort out very tiny objects that a robot arm without human-like fingers will have difficulty sorting out. This application would make full and effective use of the ‘pick and place’ operation while also allowing worker safety. Additionally, this arm could be used in the military sector for bomb disposal. Bomb disposal squads are regularly deployed in life threatening situations to carry out their tasks. The use of two humanoid robotic arms could be extremely effective by accurately replicating the motion of a bomb disposal personnel’s arms. Since the wires are often very small and handling them can be tricky, the human-like hand and fingers on the arm can operate with almost as much efficiency as human hands and fingers. With the help of sufficient training on picking and grabbing a particular wire, to cutting it, the arm with the help of instructions in a programmed form could effectively defuse a bomb. This could be a life-saving solution for the military sector.
References
[1] H. Cheng and G. Ji, \"Design and implementation of a low cost 3D printed humanoid robotic platform,\" 2016 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), 2016, pp. 86-91, doi: 10.1109/CYBER.2016.7574801. [2] Barbosa, W.S., Gioia, M.M., Natividade, V.G. et al. Industry 4.0: examples of the use of the robotic arm for digital manufacturing processes. Int J Interact Des Manuf 14, 1569–1575 (2020). https://doi.org/10.1007/s12008-020-00714-4 [3] I. Starodubtsev, I. Gajniyarov, R. Samedov, A. Sibogatova, I. Antipina and Y. Zolotareva, \"Animatronic Hand Model on the Basis of ESP8266,\" 2019 International Multi-Conference on Engineering, Computer and Information Sciences (SIBIRCON), 2019, pp. 0500-0503, doi: 10.1109/SIBIRCON48586.2019.8958199. [4] A. Sidher and Y. Shen, \"Improving a 3D-printed artificial anthropomorphic hand using the human hand model,\" 2017 IEEE International Conference on Real-time Computing and Robotics (RCAR), 2017, pp. 739-744, doi: 10.1109/RCAR.2017.8311952. [5] Immaculada Llop-Harillo, Antonio Pérez-González, and Javier Andrés-Esperanza, “Grasping Ability and Motion Synergies in Affordable Tendon-Driven Prosthetic Hands Controlled by Able-Bodied Subjects”, Front Neurorobot. 2020, Published online 2020 Aug 26, doi: 10.3389/fnbot.2020.00057 [6] Daniel Homburg, Mirja Sophie Thieme, Johannes Völker, R. Stock, “RoboTalk - Prototyping a Humanoid Robot as Speech-to-Sign Language Translator”, Published in HICSS 8 January 2019, doi: 10.24251/HICSS.2019.208 [7] Gerard Escribà Montagut, “Inmoov robot: building of the first open source 3D printed life-size robot”, Published 1 June 2016 on Semantic Scholar. [8] A. Bulgarelli, Giorgio Toscana, L. Russo, Giuseppe Airò Farulla, M. Indaco, B. Bona, “A Low-Cost Open Source 3D-Printable Dexterous Anthropomorphic Robotic Hand with a Parallel Spherical Joint Wrist for Sign Languages Reproduction”, Published 1 May 2016 in International Journal of Advanced Robotic Systems, doi: 10.5772/64113
Copyright
Copyright © 2022 Sumir Broota, Shubham Kulkarni, Anish Navale, Sanika Kshirsagar, Dr. Sanjesh Pawale. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET39804
Publish Date : 2022-01-05
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online