

Ijraset Journal For Research in Applied Science and Engineering Technology
Internet Controlled Drone
Authors: E Santosh Kumar
DOI Link: https://doi.org/10.22214/ijraset.2022.42930
Certificate: View Certificate
Abstract
A drone is an unmanned aircraft in the technical sense. Unmanned aerial vehicles (UAVs) or unmanned aircraft systems are other terms for drones (UASes). The quadcopter may be commanded remotely or can fly autonomously thanks to software-controlled flight plans in embedded systems that function in conjunction with onboard sensors and GPS. Drones are often operated or controlled via radio frequency technology, which limits the drone\'s range to a certain distance. This paper proposes a novel method of controlling drones through the Internet that does not require the drone to be within a specific range. The drone may fly till it is linked to the Internet if the recommended solution is implemented.
Introduction
I. INTRODUCTION
Unmanned aerial vehicles (UAVs) were previously most closely connected with the military, where they were utilized for anti-aircraft target practice, information collection, and, more controversially, as weapons platforms. Drones are currently being utilized in a variety of civilian applications, including search and rescue, surveillance, traffic monitoring, weather monitoring, and firefighting, as well as personal drones and commercial drone-based photography, videography, agricultural, and even delivery services.
Special techniques can be used to track the origin of a drone and offer useful information to the military. The first Aeroplan with a reusable type of radio control mechanism was created in the 1930s, and it served as a foundation for all subsequent technological advances. Military drones were later developed with traditional sensors and camera units, and they are currently even installed within missiles. Because of technological advancements, there are now many different types of drones to choose from. Few are utilized for military purposes, while others are finding a place in many large corporations.
According to a recent new update, Google and Amazon are developing drones to make it easier to transport packages by air. Facebook has offered another intriguing proposal, in which they are considering developing gigantic drones that can transport the signal to remote regions for direct internet connection.
Drones have become a significant component of the film business in today's world, and news reporters are employing them to provide information from difficult regions. To save weight and improve agility, most unmanned aircraft are composed of light composite materials. Military drones can travel at exceptionally high altitudes because to the composite material's strength.
II. OBJECTIVE
The majority of today's drones are controlled by a transmitter and receiver that communicate through radio waves, making the drone an RF device. However, these RF drones are restricted to a specific range. The biggest disadvantage of traditional drones is that they cannot be operated outside of their range. As a result, because it can be controlled via the Internet, this Internet-controlled drone may be used without any range restrictions. This drone can be operated using the IP address of the Internet connection to which it is attached, and it can continue to run as long as the drone is connected to the Internet.
III. METHODOLOGY
The project is divided into three sections: Receiver Section, Server Section, and Transmitter Section. Each section is made up of sub-systems that each perform a distinct role in the project.
A. Receiver Section
A flight controller, Electronic Speed Controllers (ESCs), Brushless Motors, and a battery make up the drone's reception portion. All of these sub-systems are critical to the drone's proper operation.
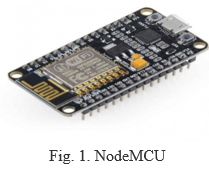
- Flight Controller: The flight controller serves as the drone's brain. Because of its capacity to connect to the Internet, NodeMCU was chosen as the flight controller in the study.
2. ESCs: ESCs are components that allow drone flight controls to regulate and alter the speed of the aircraft's electric motors. The ESC responds to a signal from the flight controller by raising or lowering the voltage to the motor as needed, adjusting the propeller's speed.

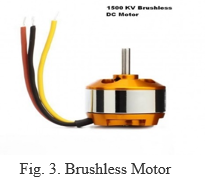
3. Brushless Motors: A brushless DC (BLDC) motor is an electric motor that rotates by using the repulsive and attractive forces between permanent magnets and electromagnets. The spinning of the motor is controlled by a controller that sends timed bursts of current to the motor's electromagnets, which controls its speed.
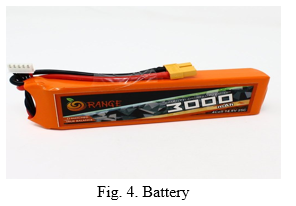
4. Battery: The drone's onboard components are all powered by the battery. Everything would stop working without the battery, from the motors to the onboard sensors. It is critical to select a battery that can provide sufficient flying duration for your demands.
5. Frame: The drone frame is the framework on which all of the receiver's components are mounted. The frame is what keeps the Drone together, whether it's constructed of carbon, wood, metal, plastic, or fiberglass. The drone would be unable to take to the skies without it.
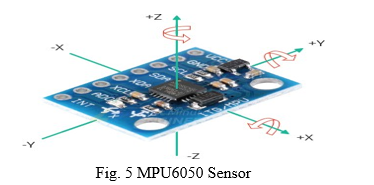
6. MPU 6050: This is a 3-axis accelerometer and a 3-axis gyroscope. It is used in the drone to measure the rotation angles like Row, Pitch and Yaw.
B. Server
The server is an important component that serves as a conduit for signal transmission. As soon as the drone is linked to the Internet, a server is built and an IP address is issued to it, and the signals from the transmitter are sent over the Internet through server using an IP address as a medium.
C. Transmitter Section
The transmitter part includes a transmitter, which in this instance is a laptop. A python script will be running on the laptop, and the signals for controlling the drone will be input into the python terminal. These signals are sent to the drone over the Internet using an IP address as the medium.
IV. PROPOSED SYSTEM
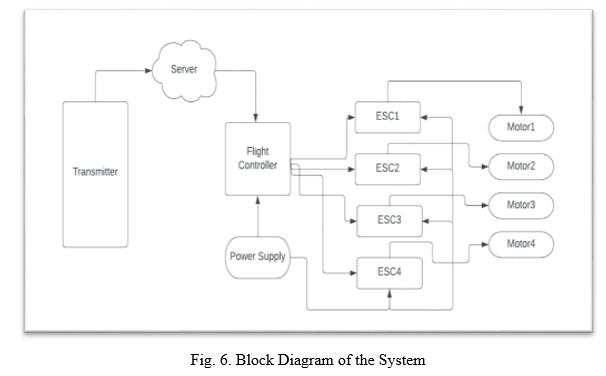
This is the Internet Controlled Drone's fundamental block diagram. This block diagram depicts the many components utilized in the project. The laptop will serve as a transmitter in this project, and the transmitter might be a mobile phone depending on the design. The IP address received when the drone is linked to the Internet will be used to connect the flight controller to the Internet. From a python console, control signals are sent to the aircraft controller. The IP address will serve as the communication channel. The signals received by the flight controller are delivered to the ESCs, which adjust the motor speed based on the signals. This is how the entire system functions.
A. Advantages over existing System
- Unrestricted Range
- Extremely Effective
- Individualized Control System
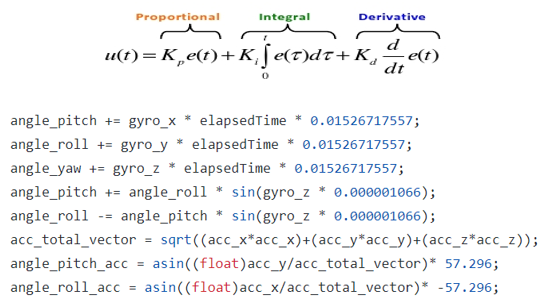
V. EQUATIONS USED\
VI. RESULTS
The needed results are acquired when the project is implemented, and they are determined to be 80% accurate, with the accuracy increasing with improved PID tuning. Here are some examples of the outcomes:
Conclusion
This research paper outlines a design approach for an Internet-controlled drone system that can extend the drone\'s range. This research paper seeks to operate the drone over the Internet utilizing the NodeMCU as a flight controller and an IP address issued to it when the flight controller is connected to the Internet.
References
[1] Introduction -- https://www.skillrary.com/blogs/read/introduction-to-drone-technology [2] Basic Information -- https://comedronewithme.com/how-drones-work/ [3] NodeMCU Image -- https://www.pcboard.ca/nodemcu-v3-cp2102 [4] Power supply Image -- https://www.indiamart.com/proddetail/3000mah-4s-25c-50c-lithium-polymer-battery-pack-lipo-22990305148.html [5] https://dronenodes.com/drone-frame-racing-freestyle/ [6] http://surl.li/bzrqa [7] https://lastminuteengineers.com/mpu6050-accel-gyro-arduino-tutorial/
Copyright
Copyright © 2022 E Santosh Kumar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42930
Publish Date : 2022-05-19
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online