

Ijraset Journal For Research in Applied Science and Engineering Technology
IoT Based Bomb Diffusing Robot
Authors: Komal Naik, Sneha Kore, Rutuja Biradar
DOI Link: https://doi.org/10.22214/ijraset.2022.47452
Certificate: View Certificate
Abstract
Diffusing any explosive materials is an extremely dangerous and risky task which needs constant attention and high degree of accuracy. Keeping in view the current law and order situation throughout the world, everyday hundreds of trained bomb diffuser squad members are either injured or lose their lives while defusing bombs. Hence we have come up with the design and prototype of a robot with the help of Embedded and IOT Technology, which will help the bomb diffusing squad members to diffuse the bomb from safer distance without actual human interference at the site thus minimizing the risk of any health hazards/ serious life injury of people present at the site.
Introduction
I. INTRODUCTION
This innovative system is made for operations which involve high risk for humans to enter, especially for some criminal cases and may prove very beneficial for military area for spying purposes. This system makes use of robotic arm as well as robotic vehicle which helps to enter an area involving high risk and diffuse the bomb.
The proposed robot provides an extra layer of protection to the bomb diffuser squad by allowing them to check and analyze a suspicious packet before actually approaching it for diffuser. Mobile robots reduce and eliminate a bomb technician’s time-on-target.
A robot takes risk out of potentially deadly scenarios and lets the bomb technician focus on what to do an explosive device rather than on the immediate danger to life and limb. The system sends commands to the receiving circuit mounted on the vehicle through android device application. The receiving circuit involves arduino microcontroller and a Wi-Fi device which receives commands sent by the Android app. The android application involves commands F, B, R, L, I, G and U so as to control the robotic arm.
Our project is designed keeping in mind, the view of the current civil wars, military instability and terrorist scenarios across the globe. Almost every day so many trained people gets either injured or loses their lives while dealing with or trying to defuse bombs. All this can be perceived by the countless number of news articles and documentaries that appears daily on news channels and print media around the world.
Though the idea of our project is original, some projects with similar objectives can also be found. Examples of the French Police have a bomb disposal robot, the Army of Israel possesses it and it is also in use by the bomb squads in a number of states of USA. The main idea of the robot here is to serve the bomb disposal squad with proving safety and security from the dangers that they are facing in their daily lives. The bomb squads in India have metal detectors and may be some other equipment for detecting the bomb and disposing it, but still they have to keep their lives at risk by going near the bomb physically or the suspicious packets without any safety and precautions.
II. LITERATURE SURVEY
|
Paper Title |
Authors |
Publications and Details |
Methodology |
Advantages |
Disadvantages |
|||||
|
Wireless Bomb disposing Robot |
Shinde Pushpa, Davane Rahul,Patil Poonam |
IRJET volume:03 Issue:04 Apr 2016 |
Atmega controller unit along with zigbee module, display unit , wireless camera |
Easy to Handle, Robust, Fast.
|
Range limitation and Remote controlled
|
|||||
|
Iot Robot : With Bomb Diffusing Application
|
Devendra R Bodkhe, Pravin F Rane, Mahesh C. Waghmare
|
IRJET Volume: 03 Issue: 12 | Dec -2016
|
Arduino controller with IR sensor Metal Detector and cutter at the arm to diffuse the bomb |
Fast and Robust No Range limitation and can be operated from anywhere |
Internet connectivity is required |
|||||
|
Military Spying and Bomb Disposal Robot Using IOT |
1chaitrali jadhav, 2shamli gibile, 3snehal gaikwad, 4neelum dave
|
(IRJET) Volume: 05 Issue: 04 | Apr-2018 |
PIC controller with ESP8266 Wifi module and Metal detector
|
Visual feedback Android operated
|
Connectivity issue |
|||||
|
Wireless Bomb Defusing Robot with camera interfacing |
Prof. Vaibhavjoshi, SonaliKatore, Yogini Bhandare, AmolKanade
|
(IJSRET), ISSN 2278 – 0882 Volume 5, Issue 4, April 2016
|
Pic micro Controller With wireless transmission module
|
user friendly remote monitoring and controlling
|
Expensive And Complex Circuitry
|
|||||
|
Bomb disposal robot |
Abdul Kadir Bin Motaleb, Mohammad BusayeedHoque Dept. of Electrical & Electronic Engineering International Islamic University Chittagong (IIUC) Kumira, Chittagong, Bangladesh |
Dept. of Electrical & Electronic Engineering International Islamic University Chittagong (IIUC) |
PIC CONTROLLER, DC servo motors getting PWM signals from the controller |
Easy to use and user friendly |
It has some Limitations in practical point of view. |
|||||
|
Design,control and performance analysis of muktibot |
Dr. Hasan U. Zaman1 , Baized1 , Chowdhury1 , Uddin1 , Rezwan1 , Ishaque1 , NaziaNawar Hassan3 Department of Electrical and Computer Engineering |
North South University1 Leading University Bangladesh3 |
Arduino controller is used and an ip camera is used for survillence. |
Compact ,user friendly,survillence,cost efficient |
NO pick and place ,usesRf module. |
|||||
III. SYSTEM SPECIFICATIONS
A. Hardware Requirements
- Power Supply
a. DC Regulated Power Supply 5v
b. Input Voltage: 230V, 50Hz, AC
c. Output Voltage: 5V DC
d. Voltage Regulator: IC7805
2. Microcontroller IC: Atmega32
3. Sensor: Metal Detector
4. Motor And Motor Driver Used: DC motor and L293D
5. Display Unit: Laptop/ PC
6. Wireless Camera: Mobile camera
IV. BLOCK DIAGRAM
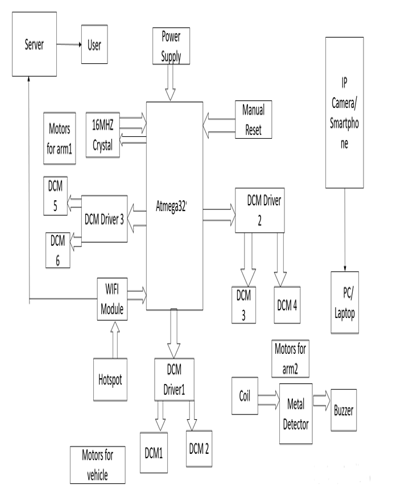
V. HARDWARE SYSTEM DESIGN
A. Components
ATMEGA32 MICROCONTROLLER
- High-performance, Low-power Atmel AVR 8-bit Microcontroller.
- Advanced RISC Architecture.
- 32Kbytes of In-System Self-programmable Flash program memory.
- 2Kbytes Internal SRAM.
- I/O and Packages: 32 Programmable I/O Lines 40-pin DIp.
- Operating Voltages: 4.5V - 5.5V for Atmega
B. Metal Detector Sensor
A metal detector is an electronic instrument which detects the presence of metal nearby. Metal detectors are useful for finding metal inclusions hidden within objects, or metal objects buried underground. They often consist of a handheld unit with a sensor probe which can be swept over the ground or other objects. If the sensor comes near a piece of metal this is indicated by a changing tone in earphones, or a needle moving on an indicator. Usually the device gives some indication of distance; the closer the metal is, the higher the tone in the earphone or the higher the needle goes. Another common type are stationary "walk through" metal detectors used for security screening at access points in prisons, courthouses, and airports to detect concealed metal weapons on a person's body .Detects metal objects up to 7 cm giving active low output with LED indication & buzzer on detecting metal.
- Features
a. Detection range adjustable up to 7 cm
b. Operation range varies according to size of the metallic object
c. Power Supply: 5V DC Power Consumption: 50mA max.
D. Detection Indicator LED and Buzzer
E. Digital output. Active with logic ?0?
F. Dimensions: 52x71 mm
2. Operation
The heart of this sensor is the inductive oscillator circuit which monitors high frequency current loss in coil. The circuit is designed for any metallic body detection by detecting the variations in the high frequency Eddy current losses. With an external tuned circuit they act as oscillators. Output signal level is altered by an approaching metallic object. Output signal is determined by supply current changes.
Independent of supply voltage, this current is high or low according to the presence or the absence of a close metallic object. If the metal object is near the searching coil, the output current will flow more. On the other hand, the current will be decrease when the object is far from the searching coil.
3. Applications
a. Detect presence of any metallic object.
b. Locate pipes, cables, metal studs.
C. Motor Driver L293D
- Features
a. It has 5 high torque DC motors for driving the robot.
b. L293D Motor driver is interfaced with microcontroller to control the robot.
c. It can drive two DC motors at a same time.
d. Over temperature protection.
D. DC Motor
In a DC motor, an armature rotates inside a magnetic field. Basic working principle of DC motor is based on the fact that whenever a current carrying conductor is placed inside a magnetic field, there will be mechanical force experienced by that conductor.
- Features:
a. It consist of 12v and 150mA current..
b. Available for low and high voltage applications.
2. Advantages:
a. Use of permanent magnets reduces manufacturing cost.
b. No need of electrical supply for field excitation, hence PMDC motor is relatively more efficient.
c. Relatively smaller in size.
d. Cheap in cost.
E. ESP8266 Wi-Fi Module
ESP8266 is serial Wi-Fi transceiver module. It contains the integrated TCP/IP protocol stack which gives access with any microcontroller to your Wi-Fi network. Each ESP8266 module is work with AT commands so it is very easy to operate it.
- Features
a. Integrated TCP\IP protocol stack
b. 802.11standard wireless protocol
c. Integrated temperature sensor
d. Integrated low power 32-bit MCU
e. Integrated 10-bit ADC
2. ESP8266 Applications
a. Smart power plugs
b. Home automat
F. Wireless Camera
A camera phone is a mobile camera is good quality, high resolution which is able to capture photographs and often record video using one or more built-in digital cameras • It consists of an IP camera with Wi-Fi hotspot connectivity. It may consist of a camera with Wi-Fi router whose IP address is known to us. Also it can be an android smartphone running Wi-Filive stream software.
G. Display Unit
We use local machine such as PC or Laptop to see live footage. A display unit is use to display the received video information which is used for robot navigation, bomb detection and diffusing the bomb.
VI. SOFTWARE SYSTEM DESIGN
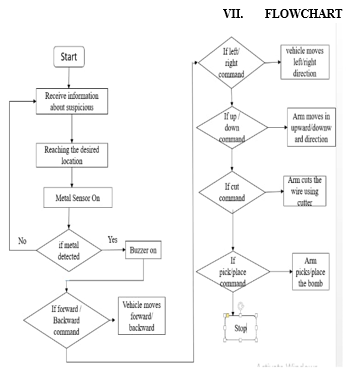
A. Algorithm
- Start
- Receives information about suspicious
- Reaches the desired location
- Metal sensor gets ON
- Detects the presence of bomb
- Generates buzzer
- After metal detection user sends the commands to robot
- When Forward command sent
- Vehicle moves Forward
- When backward command sent
- Vehicle moves backward
- When left command sent
- Vehicle moves towards left direction
- When right command sent
- Vehicle moves towards right direction
- When arm up command sent
- Arm of the bot moves in upward direction
- When arm down command sent
- Arm of the bot moves in downward direction
- When arm join up command sent
- Arm of the bot moves in upward direction from the joint
- When Cut command sent
- One Arm cuts the wire
- When pick command sent
- Second arm picks the bomb
- When place command is sent
- Second arm place that bomb on the specific place
- Again by the same process it will work.
- Stop
Conclusion
1) Disposing a bomb is a quite challenging job to military & law enforcement agency worldwide and that’s why bomb disposal robot demand will increase day by day. . 2) It will be the best choice of military defense system as it built feasibly, sustainably and in affordable way. 3) The cheap price, practical implementation and exhibition prove that this bomb disposal robot is most suitable for third world country in all respect. Technology mentioned here is simple, efficient and cost effective 4) This prototype has few limitations in practical point of view, but improvement in design, dexterity, DOF can enhance the chance to implement in real life application 5) In future the proposed system can be modified according to the following types: a) Step Climbing Mechanism. b) Vision Sensing Technique. c) Multi gripper Robotic Arm.
References
[1] Senthamizh.R1,Prof.M.Priyadarshini(Department Of ECE, DSCET, Anna University, India) , Advanced Military Spying and Bomb Disposal Robot. [2] Abdul Kadir Bin Motaleb, Mohammad Busayeed Hoque, Bomb disposal Robot Discarding explosive through wireless controlled method [3] Ali UNLUTURK, Design and Implementation of a Mobile Robot used in Bomb Research and Setup Disposal. [4] Dr. Hasan U. Zaman1, Design, Control & Performance Analysis of Muktibotan android& radio transmitter controlled bomb disposal robot
Copyright
Copyright © 2022 Komal Naik, Sneha Kore, Rutuja Biradar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET47452
Publish Date : 2022-11-13
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online