

Ijraset Journal For Research in Applied Science and Engineering Technology
IoT Based Bot for Flood Water Cleaning and Treatment
Authors: Yuvraj Patel, Deepanshu Pandita, Ashwin Nair, Nikhil Mathapati, Mimi Cherian
DOI Link: https://doi.org/10.22214/ijraset.2022.41703
Certificate: View Certificate
Abstract
This survey paper is an attempt to construct a bot that can clean and treat flood water. During floods, water becomes contaminated with waste because the use of plastic and other harmful materials is increasing uncontrollably in many flood-affected areas. Toxins from these elements disrupt the ecosystem and endanger human health, leading to cancer, congenital malformations, and immune system problems. Water scarcity is a severe concern in modern society that requires a lot of attention. As a result, flood water must be treated. By collecting the waste treatment of water using chemicals, a bot for flood water cleaning and treatment utilizing IoT is created.
Introduction
I. INTRODUCTION
A flood is an overflow of water that submerges land that's generally dry. It's a natural disaster which can be devastating for the ecosystem. During the Flood a lot of waste lying on the ground starts to float on the water. Due to this impurity of dangerous substances in water happens. Also the pH situations of water increases therefore causing dangerous effects to the ecosystem. The Internet of things (IoT) has taken the world by storm since its generalization. We can connect anything using the detectors designed specifically for objects. IoT is evolving fast alongside the rearmost invention being in wireless technology and bedded technologies. The work in this paper focuses on collecting the waste which floats on the face of the water and also detecting the cleanliness of water and treat it consequently using chlorine
II. LITERATURE SURVEY
The authors of the paper[1] have Enforced a process to design an expandable face waste drawing robot. This system consists of a scrap collection device which is designed in a H kind of housing and in turn it becomes fluently usable, the power unit device consists of motors on both sides of the housing, For power aeronautics battery is used for a long battery life. Graph module was also added to work over wider areas. Therefore the robot was made for collection of scrap and waste and it could be fluently and securely used with remote control
The authors of the paper[2] have Enforced a robot system developed to collect floating plastic scrap. It can do three major tasks autonomously, i.e., voyage and discovery, shadowing, steering, grasping, and collection. The system is caddy this paper, the authors have enforced process to design an Intelligent Water Surface Cleaner Robot for collection of Floating Garbage. In this IWSCR (Intelligent Water Surface Cleaner Robot) is designed in such a way that it comprises camera on the top, for the discovery of object a frame of control system is described similar as the IWSCR and PC ( particular computer) work contemporaneously for t and also it's concentrated for junking of scrap. For communication, USB videotape class, Bluetooth & TCP/ IP are used. SMC ( sliding mode regulator) is designed for vision steering and follows robust law. Dynamic grasping strategy is followed for floating objects. Hence the working of the design was completed and successfully demonstrated. Thus IWSCR robot was made and it was suitable to perform all of its tasks efficiently.
The authors of the paper[3] have Enforced a manner to layout an Unmanned floating waste accumulating robot. The layout of the machine is durable, mild in weight and also water-resistant. The managed unit includes an atmega328p microcontroller grounded Arduino Uno and a bluetooth is used for conversation between faraway manager and the robot. For power force a three- cellular lithium polymer battery is used and a propeller medium is used to provide the driving force. Conveyor belt medium has been enforced to accumulate scrap and trash operation to insure that the waste is going into the collector. A cell App was also evolved to ever manipulate the robot and its aspects. The regulator is so designed that it takes commands of propeller and conveyor belt movements grounded on Bluetooth signals. The frame of the robot is made from Polyvinyl Chloride to preserve its featherlight and inflexibility. device changed into tested and its functionality changed into analyzed.
The authors of the paper[4] presented an automated layout of a sewage remedy manufacturing facility, the use of IoT where discovery in the role of the tank is detected using ultrasonic detectors and discovery of emigration of risky feasts using MQ-a hundred thirty five detectors, led and a buzzer. an internet operation and Android operation are used for controlling and manipulating STP. green suggests that the water is below 25%, blue indicates water function is 50%, red will indicate the water function is 75% and buzzer will symbolize the water function is 90% which means the tank is getting complete and using dc motor it's going to switch the water from the collection tank to aeration tank. CO2 and NH3 situations which are detected are displayed at the tv display. The advantage of enforcing the STP manipulate press is the discount inside the general price of handling and preserving the STP manufacturing unit. since the demand of a driving force to be present at the manufacturing facility is no longer vital. it's salutary in economic terms too.
The authors of the paper[5]have developed an IoT monitoring Setup for WasteWater treatment, wherein distinct levels of the remedy manufacturing unit may be designed and included utilizing colorful detectors to prevent manufacturing facility damage and assure the machine's secure and effective operation. To paintings with Mongoose Zilches, an ambient setup was created. A knot MCU module is hooked up to the Mongoose. due to this parameter's configuration, the device becomes operational. The whole address setup has been performed to cover the critical parameters of the factory all through the remedy procedure. The consequences can be visible inside the Mongoose press in addition to on the misplaced Platform operation log.three essential parameters of the Wastewater treatment manufacturing facility were blanketed, and a manipulate system has been geared up to help damage.
The authors of the paper[6] The Floating Waste Scooper Robot's structure has been described in full. When compared to rubber, both scoopers are composed of plastic net and produce a tiny face surge width. The difference in medium has a big impact on how the floating plastic bottles are loaded. The designed garbage scoopers' capability was successfully estimated. The capability of the frontal scooper is superior to that of the side scooper. The robot's stylish capability is obtained at 0.38 m/ s driving speed and 0.5 m/ s belt speed, indicating that both the robot driving speed and the conveyor belt speed have an impact on garbage scooping. The maximum quantum of bottles collected is 1.71 kg/ nanosecond, which is 75 times faster than mortal force with a scoop net.
The summary of methods used in literature review is given in Table 2.1
Table 2.1
|
Paper |
Technique used |
Hardware used |
Comments |
|
Yujie Bai et al 2020 |
The camera is used along with the raspberry pi.
|
|
Double hull, which has the characteristics of pure electric drive, light hull, energy saving and environmental protection. |
|
Shihan Kong et al 2020 |
The camera and TCP/IP , Node MCU Is used for detection and communication. |
motion controller |
Better vision for waste detection and collection and movement is easy. |
|
Abir Akib et al 2019 |
Ultrasonic sensor, atmega328p based arduino uno are used. |
|
Lightweight and powerful for collection of waste |
|
Koripella Rishitha et al 2019 |
MQ-135, LED and buzzer are used for determining the water level and quality |
|
Ammonia in the water can be detected with MQ135 |
|
Niramon Ruangpayoongsak et al 2019 |
Node MCU & mongoose are used for data storing and analysis. |
|
Better approach to detect the contamination of the water body and treatment of it. |
|
Ravi Kishore Kodali et al 2017 |
Conveyor rubber is being used as a garbage collector and the controller is based on arduino uno atmega328p |
|
A good system for collection of waste by the usage of different types of sensors. |
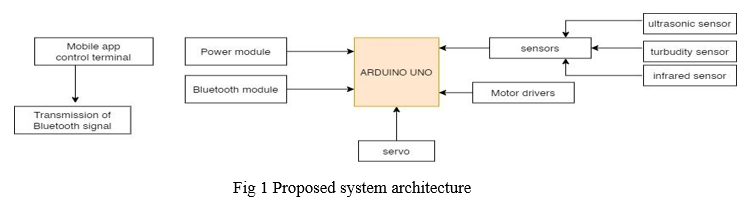
III. PROPOSED METHODOLOGY
The literature survey mentioned in the above table,We propose that we will control the robot using android with the help of bluetooth, the robot will be able to move forward, backward & sideways. The ultrasonic sensor will scan the nearby area of the robot for the detection of objects that are too big for the bot and will send the alert.Mechanism of conveyor has been implemented for collection floating waste,once the weight paases the threshold of weight sensor it will send alert to the user and user can call back the robot and empty the collected waste.Simultaneously the Turbidity sensor will detect the cloudiness of the water detected and accordingly will send alert the data and user can press the
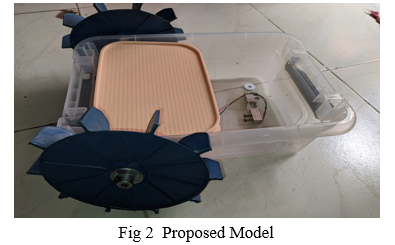
IV. DESIGN AND IMPLEMENTATION
From the literature survey we learned that following components and sensors will be used and implemented and their working:
A. Bluetooth
The first part is to establish a connection between the bot and the android device. To achieve this, a bluetooth module is connected to the arduino and it acts as a bridge between the device and the bot wirelessly.
B. Ultrasonic Sensor & Servo
The second part is to detect the objects which are too big for the bot. It sends an alert to the user that a bigger object is detected, which can be achieved by using an ultrasonic sensor mounted over a servo. The movement of the servo is limited to certain angles such that it along with the ultrasonic sensor acts as a radar.
C. Turbidity Sensor
This sensor will be used to detect cloudiness of the water and accordingly will be able to detect the turbidity and will provide the data of the impurity of water and accordingly we can dispense chemicals in water.
D. 12v Dc Motor and Propellor Blades
After the detection, the bot will move towards the garbage using a 12v dc motor which is connected with motor drivers & propeller blades.
E. Weight Sensor
It is used to detect whether the bot has reached its full capacity by attaching it to the garbage container and thereby continuously monitoring the weight. After the threshold is reached, the arduino will generate an alert on the user’s end to call the robot back.
F. Battery / Power Module
A 2200v Li-po battery will be used as a power supply unit to the whole circuit.
G. Dispensation Pipe
Chlorine will be dispensed from the pipe in small quantities with a delay of 5 seconds according to the user’s input.
V. FUTURE SCOPE
The bot can be operated using GSM or Node MCU for long ranges .The power module Li-Po battery can be replaced with a solar panel. The size of the bot can also be increased to carry more waste. The bot can also be used to detect displaced manholes submerged under the water .In defense purposes, the bot could be helpful for submarine detection under water and due to its smaller size, its very hard to detect it directly on RADAR. Using Swarm technology, multiple bots of similar kind can be used for marine life observations and similar applications.
Conclusion
We were able to identify the learning and design of a robot that could float on water and detect waste in its radius of 1.5m and accordingly the data can be visualized on a display device. The robot can be controlled from a distance of 10m by using bluetooth hc-05 module. Once the robot detects garbage an alert is generated on the user\'s screen and then based on the user\'s decision the robot is moved towards the garbage. The robot can collect garbage upto 1 Kgs and when it passes the threshold, an alert is generated on the user\'s device to call back the robot and empty the garbage container. Besides these, the robot is also able to dispense chemicals into the water after the Turbidity sensor detects the cloudiness of the water and accordingly will be able to detect the turbidity and will provide the data of the impurity of water and accordingly we can dispense chemicals in water.
References
[1] Yujie Bai1, Shuang Yang2, Ying Wu3, Yongcan Chen4, Shiqi Pan5, Yansong Deng* College of Electrical and Information Engineering, Southwest Minzu University, Chengdu 610225, China”Expansible Surface Waste Cleaning Robot “ 978-1-7281-6136-5/20/$31.00 ©2020 IEEE [2] Shihan Kong , Manjun Tian, Changlin Qiu, Zhengxing Wu , and Junzhi Yu , Senior Member”IWSCR: An Intelligent Water Surface Cleaner Robot for Collecting Floating Garbage” , IEEE 2168-2216 c 2020 IEEE [3] Abir Akib Faiza Tasnim Disha Biswas Maeesha Binte Hashem”Unmanned Floating Waste Collecting Robot” IEEE Region 10 Conference (TENCON 2019) [4] Koripella Rishitha,S Ullas “IoT based Automation in Domestic Sewage Treatment Plant to Optimize Water Quality and Power Consumption” on [5] Computing Methodologies and Communication (ICCMC 2019)IEEE Xplore Part Number: CFP19K25-ART; ISBN: 978-1-5386-7808-4 [6] Ravi Kishore Kodali, Sasweth C.Rajanarayanan and Sindhuja Yadavilli Department of Electronics and Communication Engineering National Institute of Technology, Warangal2019 “ IoT Monitoring Setup for Waste Water Treatment” IEEE Region 10 Humanitarian Technology Conference Depok, Indonesia | November 12-14, 2019 [7] Niramon Ruangpayoongsak, Jakkrit Sumroengrit, Monthian Leanglum”A Floating Waste Scooper Robot On Water Surface” 2017 17th International Conference on Control, Automation and Systems (ICCAS 2017) Oct. 18-21, 2017, Ramada Plaza, Jeju, Korea [8] Z. Wang, Y. Liu, Estimating hydrodynamic parameters of a lake surface cleaning robot using numerical methods, Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1146 – 1151, 2009. [9] M. Li, Y. He, Y. Ma, J. Yao, “Design and Implementation of a new jet-boat based Unmanned surface vehicle,” Proc. of International Conference on Automatic Control and Artificial Intelligence (ACAI), pp. 768-771, [10] M. Leanglum, N. Ruangpayoongsak, A. Phunopas, “Design and Development of the Waste Collector for a Surface Robot Cleaner,” Proc. of Industrial Engineering Network Conference (IE NETWORK), pp. 900-905, 2015. [11] Yiyang Wang “Stable Adaptive Fuzzy Control of Wastewater Treatment Plants,” Thesis by UNIVERSITY OF CALGARY, ALBERTA, April 2015. [12] E. Myatt, “A new relay for use with electronically controlled switching systems,” Proceedings of the IEE-Part B: Electronic and Communication Engineering, vol. 109, no. 21, pp. 115–117, 1962. [13] R. K. Kodali and A. Sahu, “An iot based soil moisture monitoring on losant platform,” in Contemporary Computing and Informatics (IC3I), 2016 2nd International Conference on. IEEE, 2016, pp. 764–768. [14] M. R. Ranjbar and A. H. Abdalla, “Low-cost, real-time, autonomous water quality testing and notification system,” in IJCSNS International Journal of Computer Science and Network Security, VOL.17 No.5, May 2017 [15] M.-C. Kang, K.-S. Kim, D.-K. Noh, J.-W. Han, and S.-J. Ko, “A robust obstacle detection method for robotic vacuum cleaners,” IEEE Trans.Consum. Electron., vol. 60, no. 4, pp. 587–595, Nov. 2014. [16] S. Kumra and C. Kannan, “Robotic grasp detection using deep convolutional neural networks,” in Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., Vancouver, BC, Canada, Sep. 2017, pp. 769–776.
Copyright
Copyright © 2022 Yuvraj Patel, Deepanshu Pandita, Ashwin Nair, Nikhil Mathapati, Mimi Cherian. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41703
Publish Date : 2022-04-21
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online