

Ijraset Journal For Research in Applied Science and Engineering Technology
IoT Based Floor Cleaning Robot
Authors: Yukta Shah, Baban Rindhe, Pranali Salunkhe, Omkar Shinde, Sameer Shaikh
DOI Link: https://doi.org/10.22214/ijraset.2022.41425
Certificate: View Certificate
Abstract
Cleaning the dust from the floor is one of the daily tasks that must be completed. This is a common practice not only at home, but also at companies and shopping malls. Due to the fact that dust-cleaning operations take a long time, other activities are sometimes disregarded [6]. To eradicate this problem, we came up with this project based on cleaning mechanism, our robot can reach out to places where human access is not possible. Taking the advantage of advancements achieved in mechanical technology innovation have made human life much easier and more pleasant. Today\'s clinics are becoming more sophisticated and automated. Homegrown robots are making their way into people\'s homes and daily lives, although the sector is still in its infancy. Regardless, a shift is expected, and the adoption of indigenous robots is moving forward. There are a few mechanical vacuum cleaners on the market, but only a handful of them can clean wet floors. Using a remote mechanical cleaning framework, this robot makes floor cleaning simple and rapid. This remote framework includes a transmitter app that sees a surge in demand for an android portable app that allows the robot to follow directions supplied by the client via the transmitter app. The floor cleaner robot is designed to make cleaning interactions easier than they would be if done manually. The main purpose of this project is to design and build a cleaning robot model using NodeMCU.
Introduction
I. INTRODUCTION
Cleaning is an important task that must be done meticulously in each location. This is simple at times and difficult at other times. We occasionally assign individuals for the purpose of cleaning and pay cash, and cleaning is occasionally required in areas where the presence of living beings is harmful, so we cannot relegate living beings in each location. Cleaning is occasionally required in regions where the presence of live beings is unsafe, thus we cannot allocate living beings in every place. Some locations have extensive floor areas, necessitating the use of more than one person to clean them, necessitating the use of a technique to mitigate these issues. A robot has emerged as a result of scientific progress, but it is still controlled by humans. More innovations are required to prevent exceeding the faculty limit.
Automation is a novel solution to this situation. So, using the web of things and Arduino programming, we created a self-governing floor cleaning robot [5]. So, using the internet of things and NodeMCU programming, we created an autonomous floor cleaning robot.
Because the ultrasonic sensor serves as the robot's eyes, it is the most critical component for autonomous floor cleaning robots. An ultrasonic sensor can be used to turn a robot by sensing an impediment or a wall. NodeMCU programming is used to set the robot's sensing distance range. In this range, the robot detects an obstruction and reverses direction. Today's households are growing smarter and more automated.
People benefit from home automation because it provides ease and frees up time. Domestic robots are making their way into people's homes and daily lives, although the market is still young and undeveloped. However, growth is expected, and domestic robot adoption is evolving.
There are several robotic vacuum cleaners in the market, but only a few of them can clean wet floors. The goal of this project is to design and implement a Vacuum and Moping Robot that is both autonomous and manual and can be controlled using a phone application called Blynk.
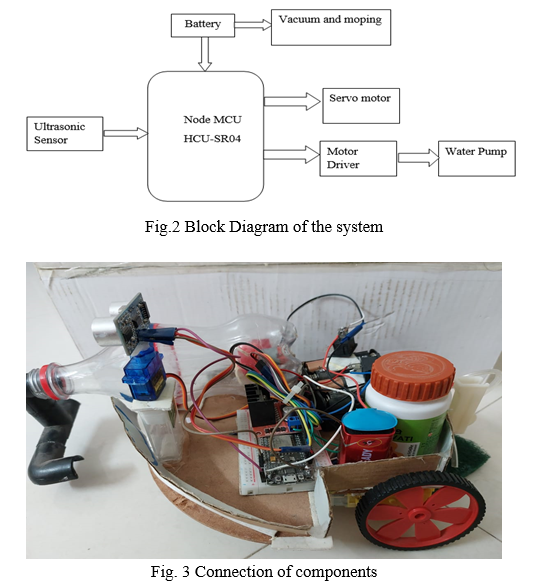
Vacuum and Moping Cleaner Robot is designed to make cleaning easier than using a manual vacuum and moping cleaner. The main goal of this project is to design and build a vacuum robot prototype utilizing a NodeMCU, a motor driver, and an ultrasonic sensor in order to achieve the project's objectives. The Vacuum Robot will meet a number of user-friendly standards.
II. METHODOLOGY
The Figure 3 shows the connection of the components. The Figure 4 shows the working model.
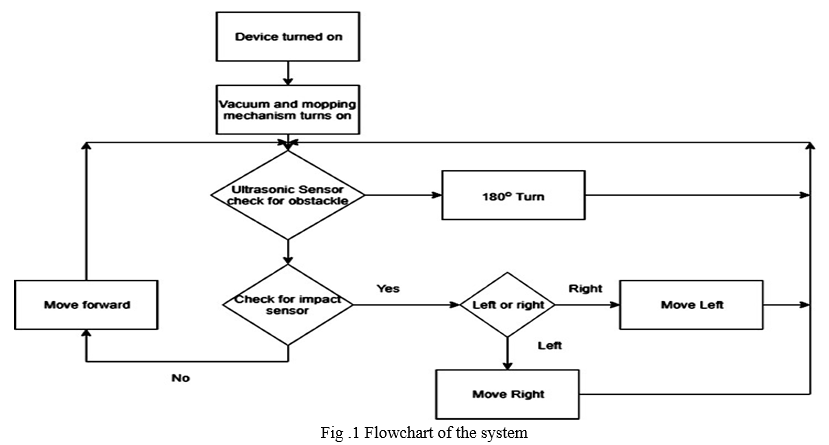
Floor cleaning robot has two switch that are connected with two batteries. First step is to on both switches and connected Wi Fi with node MCU and make whole circuit online with Blynk app. When we give signal from Blynk app to start motion than a Forward motion will start by the program set by the NodeMCU. Project has another switch which is connected with vacuum cleaner. When switch D3 turn ON from the Blynk app then the wheel start to move to forward direction. If any obstacle or wall come in front of robot than ultrasonic sensor receives the signal and send information to NodeMCU than wheels start to turn. This turn is move towards left if round is even and move to left if round is odd than robot turn to right. We have need to analyses the dimension of room and then set number of turns in NodeMCU software programming. For motion straight or turning to left or right we have to connection the motor driver to NodeMCU software and setting low or high the pins.
III. RESULT AND FUTURE SCOPE
As a result of this autonomous IOT based floor cleaning robot, the function of each part is working well and the whole system is successfully accomplished. This performs well the working of movement in a whole room direction and make cleaning of the room. The ranging accuracy of ultrasonic sensor in this prototype is about 20cm to 2m and works effectively within the prescribed limit of 50 cm range.
IV. FUTURE SCOPE
This robot can modify in future for a better effective work and multipurpose. Efficiency of cleaning can be improved. By using IR sensor and to add other features we can make a device that perfectly work for cleaning. If we add a timer than it can work for a special time with starting automatically. This floor cleaning robot is limited to clean floor stairs cannot be cleaned by this so it can be modified for cleaning of stairs. This robot can be modified for cleaning of more than one room by one robot. This robot cannot clean circular room we can programmed for cleaning every shaped room. So, these are the future scope of floor cleaning robot.
V. ACKNOWLEDGMENTS
The authors gratefully acknowledge the support of Prof. Paulami Das, Prof. Avishek Rayand for the guidance regarding research paper. Authors are also grateful for the support by friends and family.
Conclusion
We have successfully completed the autonomous IOT based floor cleaning robot model prototype and this project presents the implementation of an Automatic cleaning System controlled by Internet of Thing, but the speed of the vehicle can be reduced automatically due to the sensing of the obstacles. It reduces the accident levels and tends to save the lives of so many people. By doing this project practically we gained the knowledge about working of automatic braking system and with this future study and research. We hope to develop the system into an even more advanced speed control system for automobile safety, while realizing that this certainly requires tons of work and learning, like the programming and operation of microcontrollers and the automobile structure. Hence, we believe that the incorporation of all components in Automatic Braking System will maximize safety and also give such system a bigger market space and a competitive edge in the market.
References
[1] Manpreet Kaur, Preeti Abrol “Design and Development of Floor Cleaner Robot (Automatic and Manual) “International Journal of Computer Applications (0975 – 8887) Volume 97– No.19, July 2014. [2] Manya Jain, Pankaj Singh Rawat “Automatic Floor Cleaner” International Research Journal of Engineering and Technology (IRJET) Volume: 04 Issue: 04 | Apr -2017 eISSN: 2395 -0056 p-ISSN: 2395-0072Author, F.: Contribution title. In: 9th International Proceedings on Proceedings, pp. 1–2. Publisher, Location (2010).S. Zhang, C. Zhu, J. K. O. Sin, and P. K. T. Mok, “A novel ultrathin elevated channel low-temperature poly-Si TFT,” IEEE Electron Device Lett., vol. 20, pp. 569–571, Nov. 1999. [3] H.G.T. Milinda and B.G.D.A. Madhusanka \"Mud and dirt separation method for floor cleaning robot\", Moratuwa Engineering Research Conference (MERCon), 29-31 May 2017, Moratuwa, Sri Lanka. [4] Xueshan Gao, Kejie Li, Yan Wang, Guangliang Men, Dawei zhou and Koki Kikuchi. A floor cleaner robot using Swedish wheels. In IEEE international conference on robotics and biomimetics December 15- 18, 2007, Sanya, China. [5] Yong-Joo Oh and Y. Watanabe \"Development of the small robot for home floor cleaning\", Proceedings of the 41st SICE Annual Conference, 5-7 Aug, SICE 2002. [6] Pressman, Roger S., \"Software Engineering: a practitioner approach (Book 1)\", Andi, Yogyakarta, 2002
Copyright
Copyright © 2022 Yukta Shah, Baban Rindhe, Pranali Salunkhe, Omkar Shinde, Sameer Shaikh. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41425
Publish Date : 2022-04-13
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online