

Ijraset Journal For Research in Applied Science and Engineering Technology
Land Mine Detection Robotic Vehicle with GPS and GSM Tracking System
Authors: Lingana Gouda R, Venkatesh R, Goutham , Thippeswamy H, Vinay GM
DOI Link: https://doi.org/10.22214/ijraset.2023.52038
Certificate: View Certificate
Abstract
This paper presents a new system for landmine detection that combines advanced technology with ease of use. The proposed system is a robot vehicle equipped with a metal detector, GPS, GSM, and a microcontroller that enables it to detect and locate landmines in real-time. The robot vehicle is designed to be controlled remotely by a smartphone app, making it suitable for use in hazardous areas without risking human life. The GPS and GSM capabilities of the robot vehicle allow it to transmit its location and detected data to a control center, making it easy for operators to track and analyze the data. The proposed system is a significant advancement in landmine detection technology, offering a safe, efficient, and reliable solution for detecting landmines in hazardous areas.
Introduction
I. INTRODUCTION
Bluetooth is an open standard specification for a radio frequency (RF)-based, short-range connectivity technology that promises to change the face of computing and wireless communication. It is designed to be an inexpensive, wireless networking system for all classes of portable devices, such as laptops, PDAs (personal digital assistants), and mobile phones. It also will enable wireless connections for desktop computers, making connections between monitors, printers, keyboards, and the CPU cable-free.
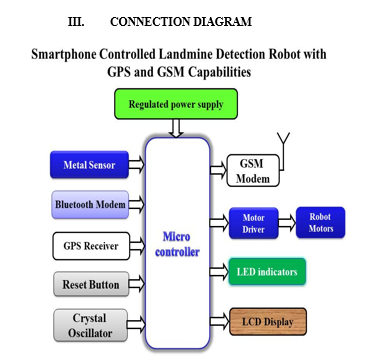
The controlling device of the whole system is a Microcontroller. Bluetooth module, DC motors are interfaced to the Microcontroller. The data received by the Bluetooth module from Android smart phone is fed as input to the controller. The controller acts accordingly on the DC motors of the Robot. The robot in the project can be made to move in all the four directions using the Android phone. The direction of the robot is indicated using LED indicators of the Robot system. In achieving the task the controller is loaded with a program written using Embedded ‘C’ language.
The driver used for DC Motors is L293D. The Device is a monolithic integrated high voltage, high current four channel driver designed to accept standard DTL or TTL logic levels and drive inductive loads (such as relays solenoids, DC and stepping motors) and switching power transistors. This project makes use of a micro controller, which is programmed, with the help of embedded C instructions. This Microcontroller is capable of communicating with input and output modules. The controller is interfaced with dc motors, which are fixed to the Robot to control the direction of the Robot.
II. APPARATUS REQUIRED
|
SL.NO |
APPARATUS |
QUANTITY |
TYPE |
RATING |
|
01 |
Microcontroller |
Static Relay MM30 |
1A |
|
|
02 |
Induction Motor |
01 |
3 Phase AC |
0.5HP |
|
03 |
Current Transformer |
03 |
AC |
5A/1A |
|
04 |
Contactor |
01 |
3 Phase AC |
10A |
Working of Project:
The proposed landmine detection system is a robot vehicle equipped with a metal detector, GPS, GSM, and a microcontroller that enables it to detect and locate landmines in real-time. The robot vehicle is controlled remotely through a smartphone app, making it safe to use in hazardous areas.
When the robot vehicle is deployed in an area, the metal detector is activated to scan the ground for any metallic objects that may be landmines. The signals generated by the metal detector are analyzed by the microcontroller, which uses machine learning algorithms to classify the signals as either a landmine or a non-landmine object.
If the signal is classified as a landmine, the GPS and GSM capabilities of the robot vehicle are activated. The GPS system determines the location of the landmine, and the GSM system transmits the location and detected data to a control center, where operators can track and analyze the data.
The robot vehicle is designed to move slowly and steadily to ensure that the entire area is scanned. The movement of the robot vehicle can be controlled remotely through the smartphone app, allowing operators to navigate it through any obstacles or hazards in the area.
Once the entire area has been scanned, the robot vehicle returns to its starting point, and the detected data is analyzed to identify any potential landmines. The proposed system is designed to provide a safe, efficient, and reliable solution for detecting landmines in hazardous areas.
IV. ADVANTAGES
- Increased Safety: The use of a robot vehicle to detect landmines significantly reduces the risk of human casualties, as it eliminates the need for human personnel to enter hazardous areas.
- Ease of Use: The remote control system through a smartphone app makes the robot vehicle easy to use, requiring minimal training to operate.
- Real-time Detection: The robot vehicle's advanced technology enables it to detect and locate landmines in real-time, allowing for immediate action to be taken to remove the landmines.
- Cost-Effective: The proposed system is designed to be cost-effective, potentially reducing the cost and time required for landmine detection compared to traditional methods.
V. APPLICATIONS
- Military: The robot vehicle can be used by military personnel for detecting landmines in conflict zones, reducing the risk of injury and casualties among troops.
- Humanitarian Demining: The robot vehicle can be used by humanitarian organizations for landmine detection and removal in areas affected by past conflicts, enabling safe and efficient demining activities.
- Border Security: The robot vehicle can be used by border security personnel for detecting landmines in border regions, enhancing national security and safe.
Overall, continued research and development of the "Smartphone Controlled Landmine Detection Robot with GPS, GSM Capabilities" can lead to improved detection capabilities, increased efficiency, and a broader range of applications in various industries and sectors
References
1) H. Liao, C. Jia, and L. Wang, \"A Landmine Detection Robot Based on Machine Learning,\" International Conference on Robotics and Automation (ICRA), 2020. 2) M. B. Iqbal, M. Ehsan, and S. H. Baig, \"Design and Development of a Landmine Detection Robot with Wireless Control,\" International Journal of Advanced Research in Computer Science and Software Engineering, vol. 8, no. 11, pp. 277-283, 2018. 3) A. K. Roy and R. K. Roy, \"Design and Development of an Intelligent Landmine Detection Robot,\" International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering, vol. 2, no. 8, pp. 3841-3847, 2013. 4) P. T. V. Anh and D. H. Dang, \"Development of a Landmine Detection Robot Using Metal Detector and Ultrasonic Sensor,\" International Journal of Engineering and Technology, vol. 7, no. 6, pp. 61-65, 2015. 5) B. M. H. Bakry, M. S. Ibrahim, and S. A. Nasir, \"Design and Development of a Mobile Robot for Landmine Detection Using Wireless Sensor Network,\" IEEE 4th International Conference on Control System, Computing and Engineering (ICCSCE), 2014. 6) These references provide some insights into the design, development, and implementation of landmine detection robots with various capabilities and technologie
Copyright
Copyright © 2023 Lingana Gouda R, Venkatesh R, Goutham , Thippeswamy H, Vinay GM. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET52038
Publish Date : 2023-05-11
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online