

Ijraset Journal For Research in Applied Science and Engineering Technology
Lane-Line Detection System for Vehicle Using Python
Authors: Soni Yadav, Kratika Tripathi , Ankan Singh
DOI Link: https://doi.org/10.22214/ijraset.2024.57947
Certificate: View Certificate
Abstract
This paper talks about a new way to help cars avoid crashing. We made a smart system that looks at the surroundings and how the driver behaves. By studying how much time is needed to avoid a crash, we created a safety model. We improved this model by adding details about the driver\'s behavior, making it better at handling different driving situations and giving the right warnings. We tested our system in computer simulations and compared it with others. Our system proved effective in reducing the chance of car crashes. We also collected data to fine-tune and check the system\'s performance offline. We used a deep neural network with a robotic car in real-time, showing that our system works well in practical situations. In summary, our new collision avoidance system, considering the environment and driver actions, shows promise in preventing car accidents. Testing in simulations and real-life situations proved its effectiveness in making driving safer.
Introduction
I. INTRODUCTION
In recent times, researchers have been looking into ways to make cars safer by preventing collisions. They've come up with two main types of collision warning systems: one based on time and another based on distance.
The first one, called the Safety Time Algorithm, checks how much time is left before a potential collision and compares it to a safety threshold. It mainly uses something called Time to Collision (TTC) as a key factor.
The second type, known as the Safety Distance Algorithm, looks at the minimum space required between a car and an obstacle to avoid a collision. This is the distance the car should maintain under the current conditions.
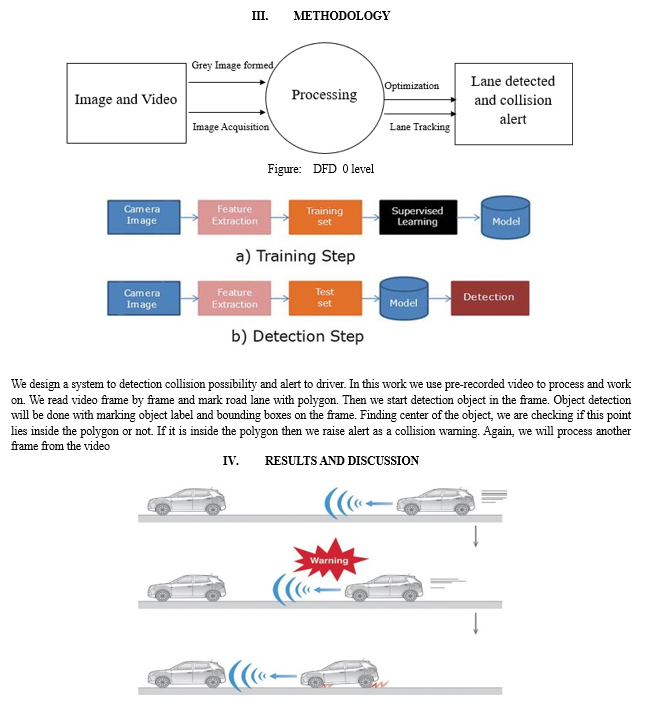
To make this work, we developed a smart computer program using Python, a programming language known for its simplicity and flexibility. Python allows programmers to write less code but still express complex ideas clearly. It supports various programming styles and comes with a large library of functions, making it suitable for a wide range of applications. In our case, Python helps us detect potential collisions on a car's lane efficiently. The central part of our approach involves applying gradient and HLS thresholding techniques to detect the lane lines in binary images. Furthermore, we utilize a sliding window search technique to estimate the color of the lane, enabling visualization of the detected lanes. Traditional computer vision-based lane detection methods primarily rely on image processing algorithms to extract lane line features. These methods involve reducing image channels, performing grayscale conversion, applying edge detection algorithms like Canny or Sobel, extracting relevant features, and performing lane line fitting using models such as cubic polynomials, spline curves, or arc curves. The input to our system consists of recorded by the vehicle's camera, which are processed using Hough Line and Hough Transform algorithms for lane mark detection.
II. LITERATURE REVIEW
Real-time collision detection the usage of neural networks it offers collision detection set of rules appropriate for actual-time applications. It is relevant to box-fashioned items and it's far primarily based totally at the relation among the colliding items positions and the effect point. The MLP neural community (Multilayer Perceptron) set of rules has been used for this problem. However, MLP offers an output of both zero or one. A higher output might be various from zero to 1, which convolutional neural networks offer.
As the neural community in organic structures communicate, with the electrochemical impulses passing from one neuron to another, much like that, synthetic neural networks are used as a records processing system. Artificial Neural Networks (ANN) may be utilized in classification, sample recognition, photograph processing. The important purpose to apply neural networks is they offer actual time operation, adaptive studying, self organization, and feature a low fault tolerance. Convolutional neural community is taken into consideration as a sort of synthetic neural community.
CNN are designed to emulate visible cortex like behavior. These are much like every day neural networks, with weights and biases upon which they carry out their studying operations. This CNN version is stimulated from Multilayer perceptron version. The express distinction is that CNN specially nation that their enter is withinside the shape of images. Convolutional neural networks showcase exclusive sample of neuron connection.
Conclusion
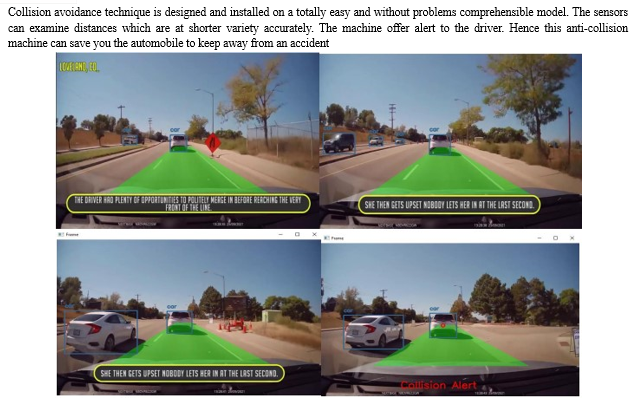
The goal of this project is to develop software that can help reduce the number of accidents caused by distracted drivers. The alert system will provide information about the potential danger, the speed of the approaching vehicle, and the type of vehicle. Taking into account factors such as the user\'s vehicle speed, location, vehicle type, and direction, the software aims to give the driver sufficient time to stop or slow down the vehicle, thereby avoiding a collision. This initiative strives to enhance overall road safety by providing drivers with timely and relevant information to make informed decisions and prevent accidents.
References
[1] C. Li, X. Hu, and L. Zhang, \"The IoT-based heart disease monitoring system for pervasive healthcare service,\" Procedia Computer Science, vol. 112, pp. 2328-2334, 2017. [2] M. Neyja, S. Mumtaz, K. M. S. Huq, S. A. Busari, J. Rodriguez, and Z. Zhou, \"An IoT-Based E-Health Monitoring System Using ECG Signal,\" in GLOBECOM 2017 - 2017 IEEE Global Communications Conference, 2017, pp. 1-6. [3] S. Bhattacharya and M. Pandey, \"Significance of IoT in India’s EMedical Framework: A study,\" in 2020 First International Conference on Power, Control and Computing Technologies (ICPC2T), 2020, pp. 321- 324. [4] E. K. Zaghouani, A. Benzina, and R. Attia, \"ECG based authentication for e-healthcare systems: Towards a secured ECG features transmission,\" in 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), 2017, pp. 1777-1783. [5] G. GURURAJ (2008), Road traffic deaths, injuries and disabilities in India: Current scenario, The National Medical Journal of India, volume 21. [6] Anand Santhosh Kumar, J. Mrudula, “Advanced Accident Avoidance System for Automobiles” in International Journal of Computer Trends and Technology (IJCTT), volume 6 no 2– Dec 2013
Copyright
Copyright © 2024 Soni Yadav, Kratika Tripathi , Ankan Singh. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET57947
Publish Date : 2024-01-09
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online