

Ijraset Journal For Research in Applied Science and Engineering Technology
Lane Lines Identification System
Authors: Subhash Ramteke, Shrawani Kumthekar, Neha Phawade, Sagar Chandgude, Sonali Parabh
DOI Link: https://doi.org/10.22214/ijraset.2023.49005
Certificate: View Certificate
Abstract
A driver support system is the most important feature of advanced vehicles to make sure driver safety and decrease vehicle accidents on the roads. The very critical task is to detect the road lane lines detection or the road boundaries/lanes. . It includes the localization of road decisions in a similar position between vehicles and roads. An aim is to a system using the onboard camera which is looking outwards from the windscreen is expressed in this paper.1]The unclear and occluded lane lines cannot be detected by most existing lane detection models in many complex driving scenes, such as crowded scenes, poor light condition, etc. The proposed system does not require any extra information such as lane width, time to lane crossing, and offset between the centers of the lanes. This project is based on python and OpenCV to detect lane lines on the road.
Introduction
I. INTRODUCTION
A Lane Lines Identification System is an advanced system essential in the field of AI and ML and computer vision and has been applied in intelligent vehicle systems. And a main objective is to develop a system that is capable of detecting the lane lines and giving the alarm or message when a car will be passing the lane, partially it will implement object detection also so that accidental cases will also be avoided.
Advanced Driving Assistance Systems (ADAS) require the capability to model the shape of road lane lines and localize the vehicle concerning the road. Even if, the main reason to build modern and intelligent vehicles is to increase the safety rules by the complete or automated partial driving tasks.
[2]There are many difficulties encountered when performing lane detection in complex traffic driving scenes.[3]proposed that spatial CNNs can more efficiently learn the spatial relationships of feature maps and the smooth, continuous priors of lane lines in traffic scenarios than previously developed networks.
So, a system that provides an alert to a driver for crossing the lane which is a very good way to save many people's life.
II. LITERATURE SURVEY
As we studied many previous papers and the methods that are used in that, we studied about that and tried to find out the drawbacks in that.
A. SSLA-Based Traffic Sign And Lane Detection For Autonomous Cars
This paper uses the SSLA technique which is for lane detection.
1. The work in this paper is focused on Lane detection and Traffic Sign by using the SSLA (Shape Supervised Learning Algorithm).
2. [4]The proposed method has the following main steps, i) preprocessing, ii) Edge detection, iii) Region of interest selection iv) line extraction, v) lane detection v1) lane tracking
3. Sometimes to detect the signal is not possible because of its height.
B. Robust Lane Detection For Complicated Road Environment Based On Normal Map
This paper uses the Normal Map technique which is for lane detection.
- The generation of Normal Map consumers more of the time in the proposed line detection algorithm.
- [5]An accurate disparity map is fundamental to better reconstructing the normal map. In this paper, the depth image dataset is provided from the KITTI dataset.
- Lane-like scratches and low visibility of lanes caused by light are challenging for the proposed algorithm.
C. Performance Analysis of Lane Detection Algorithm Using Particle Hough Transforms
This paper uses the Normal Map technique which is for lane detection.
- [6]This paper first used the traditional Hough transform and then followed by this proposed partial Hough transform method.
- This Algorithm is only efficient in lower-bound image recognition, it does not recognize upper-bound images, and it consists of trees, stack lines, etc.
- It processes only Grayscale images because color image processing requires more time.
D. Lane Detection And Tracking For Intelligent Vehicles
This paper uses the image mapping technique which is for lane detection.
- The work in the paper is for lane detection; they have used the segmentation method, and image cleaning to reduce the noise.
- In the dark area, it gets difficult to detect the lane over the application.
III. METHODOLOGY
In the field of deep learning, Convolutional Neural Network is the class of deep neural networks, which are mostly deployed in the field of analyzing or image recognition. Convolutional Neural uses a very special method which is known as Convolution. A convolution layer is a special class in processing data which is like a grid topology such as images. An image is a binary representation of data that is captured visually. that holds a series of pixels arranged in a grid like manner that holds pixel values to denote how bright and which color the pixel should carry. EXAMPLE- If we consider an example of human anatomy, the human brain processes a huge amount of information. Each neural works in its respective field and it is connected to other neurons in a way that covers the entire visual field. According to it, each neuron in CNN processes data only in its respective field as well. The layers are arranged in such a way that detects simpler patterns first like lines, curves, ages, etc and more complex patterns fetch objects, etc.
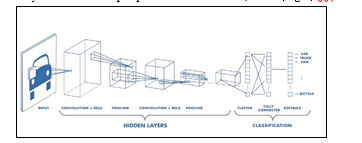
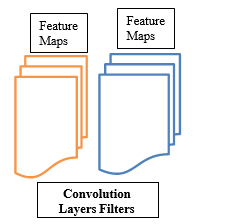
A. Convolution Layers
Convolution Layers are the main blocks used in convolutional neural networks. A convolution neural network is a simple application that filters the image that is taken as an input in a format of RGB. It results in a feature Map, identifying the location and strength of detected features in an input format like an image.[8]Here if we have an input of size N x N x W and doubt numbers of kernels that have the size of F with stride S and amount of Padding, then the result of size volume can be determined by this formula.
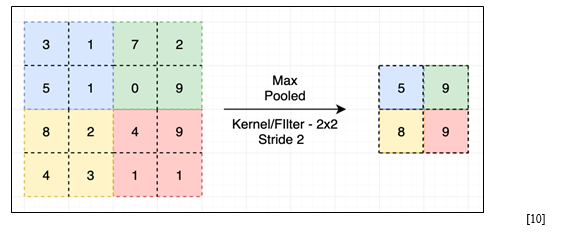
B. Pooling Layers
The pooling layer overviews the attributes presenting the region of the feature map generated through an above mention convolution neural layer so upcoming operations are performed on summarized features instead of prissily fixed features generated by the convolution layer these type of model makes a very robust to variation in the position of the feature in the image which we have taken the input.
Polling reduces the dimension of the feature map, it also decreases the number of parameters to learn and analyze the amount of computation performed in the network.[9]Pooling is needed to sample the detection of features in feature maps.
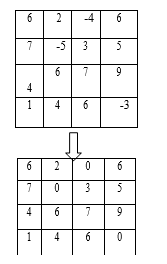
C. ReLU
ReLU for the Rectified Linear Unit is a non-linear function that outputs the input directly if that is possible to do otherwise, it will show the output as 0. [11]It computes the function f( K ) = max( 0, K ). ReLU is 6 times more computable, efficient, and reliable than sigmoid and tanh.
ReLU reduces the –ve value to 0, and ReLU helps with making the model nonlinear. It will ReLU speed up the training and be fast to compute.
IV. WORKFLOW
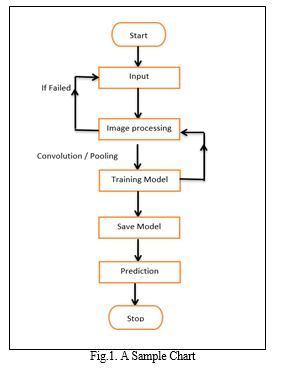
Clearly, As per the above flow diagram lane detection system is a real-time detection and assisting system in which pre- processing is done on the input taken, by applying convolution and Polling filters. When filtering and polling are completed model training is done, if the model is failed then it is again directed to preprocessing.
Adding to it coming to the next step after training the model prediction is done and lanes are detected. If it is found that an object or car is passing the lanes then an alert is generated, if a car is inside the lane then again it is repeated to the input field.
V. ADVANTAGES
The aim is to build a system that is capable of detecting the lane off the road through which the driver can easily drive.
- Drivers can easily detect the lanes on the road.
- Easily drive a car at night.
- It quickly informs the driver if the vehicle is crossing the line of the lane.
- Help to avoid accidents and drivers are confident to drive a car.
- Good interface.
- Compatible with drivers.
- It improves the efficiency of driving cars.
VI. ACKNOWLEDGEMENT
I would like to thank Miss. Sonali Parab for her guidance and support for guidance throughout our whole project and for motivating us. Also want to thank Dr.Deepika Ajalkar for continuously supporting us and encouraging us for developing this project and would like to express our special thanks to Dr. Poonam Gupta (HOD) who gave us the golden opportunity to do this wonderful project. I also like to thank the Department of information technology and GH Raisoni College of Engineering and Management, wagholi, Pune for helping and supporting research work.
Conclusion
Intelligent Transportation Systems proved that lane detection is the most efficient technique. It seems that in the review on lane detection, most of the researchers have ignored the problem of the fog and noise in images. In this Lane detection, the system quickly alerts the driver if their vehicle is crossing over the line which divides the lanes, thereby helping to avoid or reduce the cases of an accident. Like many other features of safety, the creators of this technology say that it will help to prevent a car accident.
References
[1] “Performance Analysis of Lane Detection Algorithm using Partial Hough Transform” Transactions on IEEE, 2020 “P.Maya, Dr.C.Tharini”. [2] ”A Robust Lane Detection Using Vertical Spatial Features and Contextual Driving Information(2021)” [3] “A Comprehensive Guide to Convolutional Neural Networks?—?the ELI5 Way.” Medium, 16 Nov. 2022, Saha, Sumit. towardsdatascience.com/a-comprehensive-guide-to- convolutional-neural-networks-the-eli5-way-3bd2b1164a53. [4] ”Robust Lane Detection for Complicated Road Environment Based on Normal Map” Transactions on IEEE 2021 CHANG YUAN1, HUI CHEN1,JU LIU1,,(Senior Member, IEEE),DI ZHU1,YANYAN XU2,3 TENSYMP 978-1-6654-0026-8 [5] “Recent progress in road and lane detection: “ A survey. Mach. Vis. Appl. 2014, 25, 727–745.[CrossRef] Hillel, A.B., Lerner, R., Levi, D., Raz, G. [6] “A Comprehensive Guide to Convolutional Neural Networks?—?the ELI5 Way.” Medium, 16 Nov. 2022, Saha, Sumit. towards datascience.com/a-comprehensive-guide-to- convolutional-neural-networks-the-eli5-way-3bd2b1164a53. [7] Convolutional Layer - an Overview | ScienceDirect Topics.” Convolutional Layer - an Overview | ScienceDirect Topics, www.sciencedirect.com/topics/engineering/convolutional- layer#:~:text=A%20convolutional%20layer%20is%20the,and%2 0creates%20an%20activation%20map. Accessed 28 Nov. 2022. [8] “A Gentle Introduction to Pooling Layers for ConvolutionalNeural Networks ” MachineLearningMastery.com, 21Apr.2019Brownlee, Jasonmachinelearningmastery.com/pooling-layers-for- convolutional-neural-networks. [9] “Pooling Layer?—?Beginner to Intermediate.” Medium, 19 Feb.2022,Rana,Kartikeya. ai.plainenglish.io/pooling-layer- beginner-to-intermediate-fa0dbdce80eb. [10] “What Is Rectified Linear Unit (ReLU)? | Introduction to ReLUActivationFunction.”, 29Aug.2020, Team, GreatLearning. www.mygreatlearning.com/blog/relu- activation-function.with Curve Fitting.” PatternRecognit. 2016, 59, 225–233. [CrossRef] Niu, J,; Lu, J., Xu, M., Lv, P, Zhao, X.” [11] ” Efficient Road Lane Marking Detection with Deep Learning.” In Proceedings of the IEEE International Conference on Digital Signal Processing, Shanghai, China, 19–21 November 2018 pp. 1–5. [CrossRef] Chen, P, Lo, S., Hang, H., Chan, S., Lin, J; [12] “A Deep Dive Into Lane Detection With Hough Transform.” Medium, 5 May 2020, Ferdinand, Nushaine. towardsdatascience.com/a-deep-dive-into-lane-detection-with- hough-transform-8f90fdd1322f. [13] “Pyramid Scene Parsing Network.” In Proceedings of the IEEE Conference on ComputerVision and Pattern Recognition, Honolulu, HI, USA, 26 July 2017;pp. 6230–6239. [CrossRef] Zhao, H., Shi, J, Qi, X.;Wang, X., Jia, J. [14] “Factorized convolutional neural networks.” In Proceedings of the IEEE International Conference on Computer Vision Workshops, Venice, Italy, 29 October 2017;. pp. 545–553. Wang, M, Liu, B., Foroosh, H. [15] “Performance Analysis of Lane Detection Algorithm using Partial Hough Transform” IEEE Xplore.2020 P.Maya, Dr.C.Tharini [16] “Spatial as deep: Spatial cnn for traffic scene understanding.” arXiv 2017 arXiv:1712.06080. Pan, X., Shi, J., Luo, P,Wang, X., Tang, X. ,T. Lane detection in complex scenes based on end-to-end neural networks. arXiv 2020, , arXiv:2010.13422. Liu,W, Yan, F., Tang, K. Zhang, J. Deng. [17] “Vision-based robust road lane detection in urban environments.” In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014;4920–4925. . Beyeler, M., Mirus, F., Verl, A. pp. [18] ” Lane Departure Warning System for Advanced Drivers Assistance.” In Proceedings of the Second International Conference on Intelligent Computing and Control Systems, Madurai, India, 14–15 June 2018;. 1775–1778. Kamble, A., Potadar, S pp [19] ” Advances in vision-based lane detection:” Algorithms,integration, assessment, and perspectives on ACP- based parallel vision. IEEE/CAA J. Autom. Sin. 2018, 5, 645– 661. [CrossRef] Xing, Y., Lv, C., Chen, L.,Wang, H., Wang, H., Cao, D., Velenis, E.,Wang, F.Y [20] “Key Points Estimation and Point Instance Segmentation Approach for Lane Detection.”arXiv 2020, arXiv:2002.06604 Ko, Y., Jun, J., Ko, D., Jeon, M.. [21] Robust Lane Detection Using Two-stage Feature Extraction
Copyright
Copyright © 2023 Subhash Ramteke, Shrawani Kumthekar, Neha Phawade, Sagar Chandgude, Sonali Parabh. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET49005
Publish Date : 2023-02-05
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online