

Ijraset Journal For Research in Applied Science and Engineering Technology
Leaf Disease Detection and Spray Pesticide Robot using Image Processing
Authors: Dr. Shankaragowda B B, Shaik Abrar Ahamed
DOI Link: https://doi.org/10.22214/ijraset.2022.45486
Certificate: View Certificate
Abstract
India is a land of agriculture and mainly known for growing variety of crops. Around half of the population in India depend on agriculture. Diseases to the crops may affect the livelihood of the farmers. In order to overcome this major problem, a robot that detects the leaf disease using image processing and Machine learning is deployed. This robot also monitors the field condition such as quality of crops and sprays the required amount pesticides for achieving the good yield in agriculture. The robot is designed using an advanced processor known as yolov5 which is integrated with machine learning model. The machine learning model with Image processing is trained with feature extraction, Segmentation and classification of disease using image processing.
Introduction
I. INTRODUCTION
Today there is a high demand for internet application development, so IoT emerges as a major technology as it produce various internet applications.
Internet of things is the internet connectivity to devices and consists of electronics and other forms of hardware and the interaction with them is taken over internet. IoT is an autonomous control feature by which any device can be control without human interaction. Things in IoT refers to the combination of hardware, software data and services.
IoT system compromises of four different components
- Sensors/Devices: Sensors is a device that detects and collects data to respond for some input from environment. The input can be any of the form like heat, light, pressure, temperature. The output is in the signal form which can be readable by humans at sensor location or it can be transmitted electronically over network.
- Connectivity: The data obtained is sent to cloud and sensors can be connected to cloud using cellular satellite, wi-fi, Bluetooth or directly through internet.
- Data Processing: Programming plays out some sort of handling like once information jumps on cloud, for example, checking the temperature perusing is inside the worthy range.
- User Interface: The data got will be made valuable to the clients by alarming them through email, content, notice. A client can have interface to beware of framework.
A. Problem Statement
Farmers suffering large financial losses because of usage of incorrect irrigation mechanisms, insect pests and attack of plant diseases, usage of uncalculated number of pesticides and insecticides. Wireless crop monitoring reduces labor costs while also allowing for precise tracking of changes that occur in real time at the field. Farmers must take numerous precautions when spraying pesticides, including wearing proper clothing, gloves, and masks, among others. In such situations, the use of robotics is a very imminent technological solution that increases productivity and efficiency. On the earth 42% of population is dependent on an occupation of agriculture, they have to do a lot of work and more load on them. Spraying pesticides is one of these jobs that is risky and challenging because the chemicals used in these pesticide liquids are hazardous. It may cause breathing difficulties as well as other physical issues. As a result, we created an agricultural robot that assists farmers in pesticide liquids while reducing workload.
B. Objective
To design automated pesticide spraying machine. To apply the same pesticide machine for different types of crops in farms. To make economically efficient machines which are affordable to average farmers.
C. Proposed System
This agricultural robot decreases farmer’s widespread attempts and additionally improves the art work's tempo and precision. This robot has been created to enhance application precision and yield. As a microcontroller, arduino is used. Simplest arduino controls the stay video movement, spraying impact and robotic motion.
A movable spraying gadget (ASD) was structured and worked as a trial instrument so as to execute the One Target-One Shoot (OTOS) spraying strategy. The gadget is mounted on a versatile mechanical sprayer and supplies pressurized pesticide.
The operational idea of the ASD is as per the following:
- Identify the weeds and disease through the camera.
- Identify the pest.
- If you find the weed then spry.
- If you find the leaf disease then spry.
Alter the weed and leaf disease measurement to approach the end hover across of the objective; and Open the sprayer electric valve for a particular predefined term Pesticide spraying system alongside the present mechanical technology innovation is the fundamental motivation behind this undertaking which would help the rancher in his everyday spraying action. This task is fundamentally a robot.
II. LITERATURE SURVEY
1. Gesture managed wi-fi Agricultural Weeding robotic.
Authors: S. Gokul , S.Ajith Sundaresh, M. Gopinath, R. Dhiksith
To expand AI primarily based robots powered with high precision herbicide spraying disposing of manpower. the rural weeding robot become constructed and tested underneath normal external discipline like situations for demonstration. The running of the arm is repetitive and so the rover movements and removes the weed in the discipline. The tool designed is designed to do away with the weeds from the ploughed land routinely in an clean manner i.e., no manpower required.
2. Faraway area Plant sickness Detection the usage of photo Processing
Authors: Sabah Bashir, Navdeep Sharma
Authors present ailment detection in Malus domestic through an effective method like ok-mean clustering, texture and color evaluation. to classify and apprehend specific agriculture it uses the texture and shade feature the ones typically appear in regular and affected areas. In coming days, for the motive of class ok-manner clustering, Bayes classifier and important factor classifier also can be used.
3. Improving hobby recognition Accuracy in Ambient-Assisted living structures by computerized characteristic Engineering
Authors: Eftim Zdravevski
Segmenting records streams with sliding windows. set of rules for characteristic extraction, selection and category. hobby popularity based totally on sensory statistics in AAL systems is an critical venture. It may be used for estimation of ranges of bodily hobby, it could result in detecting modifications of day by day patterns which can indicate an rising medical circumstance.
4. Computerized pc imaginative and prescient primarily based Weed elimination Bot
Authors: Gaurav Sethia, Harish Kumar S Guragol, Swati Sandhya, Rashmi N, Shruthi J
Photograph Acquisition and Pre-processing, picture Segmentation, function Extraction, photo type. The device gives desirable outcomes but has a number of scope for development. The design may be further optimized to in shape the desires of farmers and offer most vicinity insurance on the equal time. The control mechanism for the delta arm may be made greater precise and hence improving its precision.
III. SYSTEM DESIGN
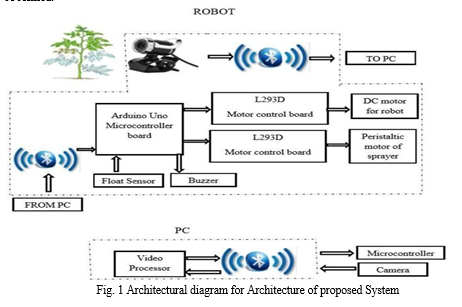
A. System Architecture
The robot model Web camera scans the crops up to a height of 3 feet. This live feed from the acquired plant is sent to the Video processor via Wi-Fi, which processes the video using the Video processing algorithm in Arduino . Arduino is used for live video processing. The algorithm analyzes automatically the amount of pests on the plant, particularly the leafy region, using video processing technique. In order to enhance its characteristics, the video undergoes pre-processing and segmentation by suppressing unwanted distortions and removing noise, it is also split into various components to identify the acquired picture. Morphological operations are performed to process the video based on forms that help the robot spray various pesticides depending on the pest type. Noise removal takes place in two erosion and dilation steps. Erosion is performed to remove the unwanted pixels detected as pests. To recover the pixels of pests in the video, dilation is performed. The algorithm code indicates the time to spray pesticide based on the number of plagues. Processor data above is supplied to the Arduino Microcontroller board with an ATmega328p chip via Bluetooth. The instructions for controlling robot motion are supplied via the L293D Motor Control Board, which is used as a driver circuit for the Robot DC Motor and Peristaltic Motor. DC Motor is used for wheel motion and Peristaltic Motor is used for pesticide spraying. To detect pesticide levels, a Float sensor is linked to the Arduino Uno Microcontroller board. If the amount of pesticide in the spraying bottle is above the threshold level, the spraying of pesticides is performed on the basis of the number of pests and if it is below the threshold value. The robot is then stopped for the pesticides to be refilled.
B. Flowchart
Our proposed paintings, as proven in above determine fig 2, the camera is used to detect the impediment and captured pix supplied to machine to become aware of the sickness of the plant. by means of the use of picture processing we are able to predict the sicknesses. Sprinkle motor is used to sprinkle the pesticide at the affected plants.
The proposed techniques include the subsequent steps as proven in above flowchart in fig 2.
- Input Picture: First, we deliver the captured picture as a input to the machine. This enter photo is the photograph of diseased leaf. This photograph can be of .jpeg format.
- Data Pre-processing: Pre-processing of the photograph is completed which reduces the noisy statistics from it. statistics pre-processing are involve cleansing, selection, normalization, transformation and characteristic extraction. The product is a very last education set.
- Image Segmentation: Picture segmentation is not anything however a technique of partitioning the virtual or analog image into the multiple segments or more than one elements i.e. pixels units, additionally known as an photograph item. the principle intention of segmentation is to simplify the image and make it something extra meaningful and less complicated to analyse.
- Characteristic Extraction: In this step, feature extraction is finished. it's miles the type of dimensionality discount which is work successfully and represents the thrilling components of an photograph and convert it into a function vector. This technique is useful whilst an photograph or a image length is big or not compatible and decreased characteristic illustration is needed to swiftly whole the responsibilities which includes image retrieval and matching. this option extraction can also extract the features from the segments of an photo.
- Feature Choice With The Aid Of Optimization: This option choice optimization selects the optimized features by optimization method the usage of deep learning technique. characteristic selection strategies are regularly used inside the domain names wherein there are numerous features and comparatively few samples or information points
- Evaluation Of Precision Remember And Accuracy: After the step of feature selection, we must interpret the overall performance measures analysis such as precision, take into account and accuracy.
a. Precision: Precision is a ratio of effectively expected positive observations to a complete expected advantageous observations or information points. consider: recollect is the fraction of the full amount of applicable times that were absolutely retrieved.
b. Accuracy: Accuracy is the metric for evaluating classification models. it's miles the fraction of predictions our version were given right.
7. Detection of affected Leaf: In this step we got the end result and output because the call of sickness.
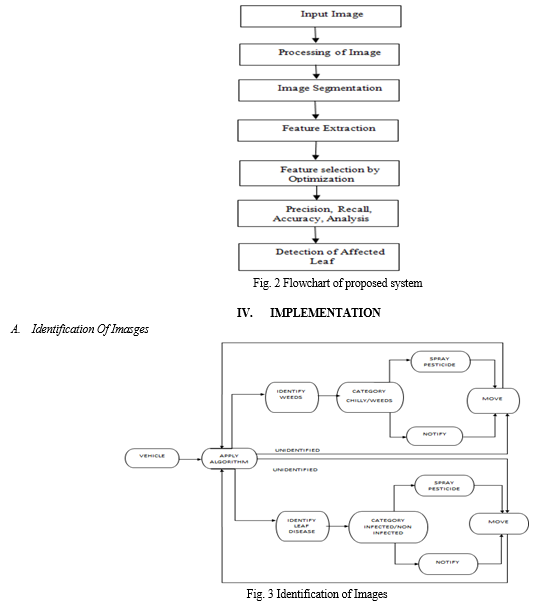
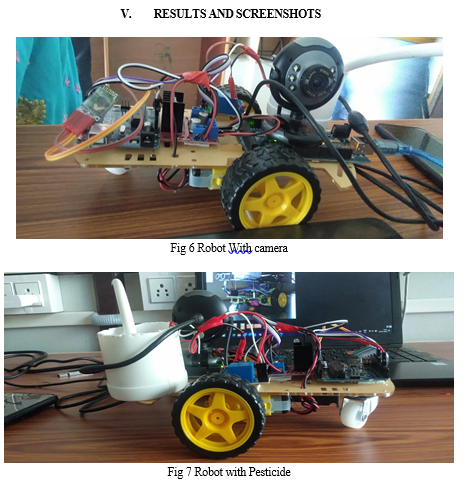
In this work first it has a robot which moveable across the field which can be automatically handle with app/application called blue. In this application we can operate manually forward, backward, moving right side and also moving left side. In this project we use camera for the image identification. Image will capturing through the camera and identifies the what type of the image. If image it’s a weed image the apply the algorithm called volov5. Volov5 is nothing but images which test and trim our work we will applying the mechanism if you find the any weed image then you spry the pasties and if you don’t found you move forward. In some case if you having a chilly plant in plant they check the life which causes dieses then find dieses then spray the pest reels moving forward this process. Pest also having the some different type of pest case one having some weed identify then spraying the pest anther way its different having pesticides and come to check and given the alternative pest and spring.
B. Live Streaming
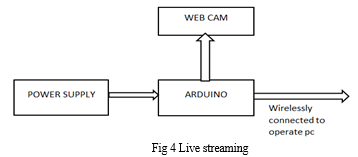
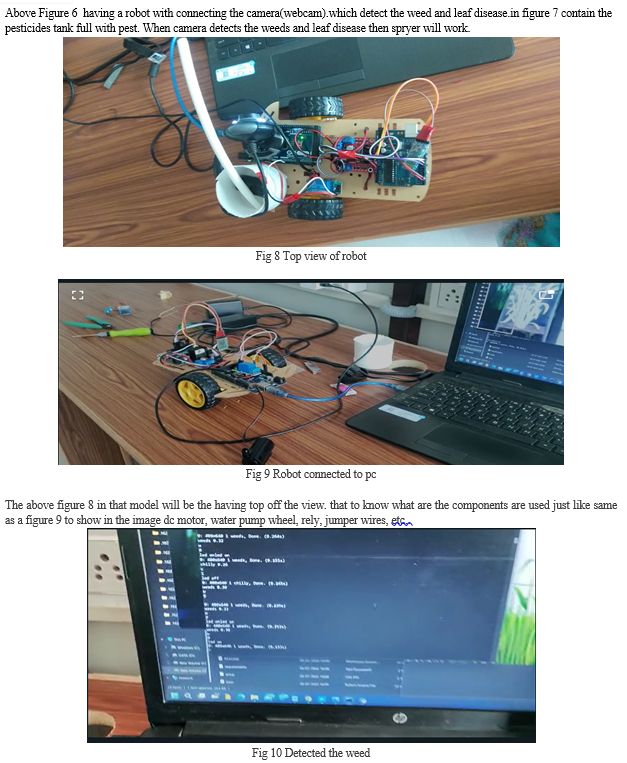
This agricultural robot decreases farmer’s widespread attempts and additionally improves the art work's tempo and precision. This robot has been created to enhance application precision and yield. As a microcontroller, Arduino is used. Simplest Arduino controls the stay video movement, spraying impact and robotic motion. Ones your project will complete you having some another pesticides after that you can upload the photo will anther you upload the video this time you should that video procuring atomically in system after that they moving with another step. Webcam is directly connected to the pc and Arduino the images send to Arduino in that processing after its send to pc or computer which wirelessly connected. In pc its find weed are leaf decease then you come to another step which spraying the pest.
C. Agriculture Robot Mechanism
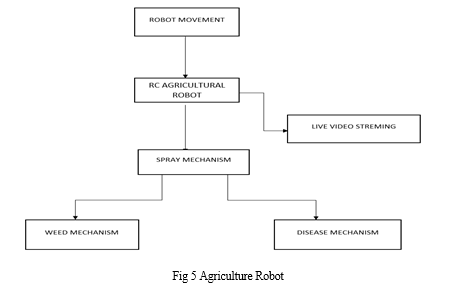
For the operation of the robot and the spray unit, the operator uses the Android software. The Arduino is hooked up to an regular USB net cam, which is installed at the robot to flow into stay video to the operator-related laptop. We use Arduino programmed with Python's programming code to identify and classify the disease in vegetation.
- Robotic Movement: DC vehicles are used for the robotics’ motion which is probably ruled electronically with the resource of Arduino UNO with the assist of L293D. The HC-05 Bluetooth module gets indicators from the input and sends them to the controller, which in turn spins the engine. via obtaining the sign, DC cars are switched ON and rancid thru permitting Arduino to have a specific pin. An true sufficient speed is supplied with the aid of 300rpm DC motors.
- Video Streaming: With the resource of the USB webcam and Arduino we movement the video to the operator laptop. Video streaming can be achieved in lots of approaches, i.e. through installing streamer software on each the Arduino and the operator computer or via way of putting in VLC player on each the transmitter side and the receiver aspect [2]. We choose to apply VLC player to stream the video with https:// followed with the aid of raspberry pi's IP deal with, so it seems simple for operators to take snapshots from the streaming video to locate in addition disease.
- Pesticide Scattering Medium: Bluetooth module connects to the virtual key of Arduino UNO, which receives the signal set up at the driver's cell phone from the Android app. The floating detector and submersible pump had been installation within the fungicide tank. The submersible pump is attached to at least one give up of the bitsy periphery pipe and the occasion stop is associated with the sprayer snoot. The driver can use the Android app to spray specific fungicide if the set of tips says the factory is tortured by a many diseases.
Conclusion
Controlling thru mobile application controlled Bluetooth robot is improved via developing independent robot. Over spraying the fertilizers can be stepped forward by way of classification techniques and spray in line with the manner required. None of the Indian farmers are utilizing era so there\'s a want of device that can stumble on weed in early stages. The blue application is particularly educated in agriculture fields most effective so presenting to pick out natively grown weeds inside the Indian agriculture lands the use of photograph processing and different trendy technologies. The prescribed contraption and spraying method enable to play out the spraying undertaking profitably and financially. The central duty of this endeavour is in structure up a novel spraying contraption that ensures full incorporation of the recognized article with least shower. Pesticide application is decreased by spraying every goal independently. This is cultivated by planning the spraying device toward the point of convergence of the goal and setting the thing detachment of the spraying as demonstrated by the shape and size of the goal. A sharp mechanical structures for spraying pesticides in cultivation field for controlling the robot by the use of a remote choice rather than manual completion of yields shower tests, reduces the prompt prologue to pesticides and the human body, moreover decrease pesticide harm to people, and improve age adequacy. There can be diverse landscape and statures of yields for the spraying activity tests that demonstrates that a viable, portable robot, and gives the better splash impact at the workplace, for example, its low costs, simplicity of dealing with and simple support and different qualities of people with an expansive market in rural creation.
References
[1] Gesture Controlled Wireless Agricultural Weeding Robot. S. Gokul , S.Ajith Sundaresh, M. Gopinath, R. Dhiksith To develop AI based robots powered with high precision herbicide spraying eliminating manpower. [2] Remote Area Plant Disease Detection Using Image Processing. Sabah Bashir, Navdeep Sharma Authors present disease detection in Malus domestic through an effective method like K-mean clustering, texture and color analysis. To classify and recognize different agriculture it uses the texture and color feature those generally appear in normal and affected areas. [3] Improving Activity Recognition Accuracy in Ambient-Assisted Living Systems by Automated Feature Engineering Eftim Zdravevski Segmenting data streams with sliding windows. Algorithm for feature extraction, selection and classification. [4] Automated Computer Vision based Weed Removal Bot Gaurav Sethia, Harish Kumar S Guragol, Swati Sandhya, Rashmi N, Shruthi J Image Acquisition and Pre-processing, Image Segmentation, Feature Extraction, Image Classification.
Copyright
Copyright © 2022 Dr. Shankaragowda B B, Shaik Abrar Ahamed. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45486
Publish Date : 2022-07-09
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online