

Ijraset Journal For Research in Applied Science and Engineering Technology
LIDAR Technology
Authors: Mr. Pramod K, Akshay M C
DOI Link: https://doi.org/10.22214/ijraset.2022.43007
Certificate: View Certificate
Abstract
Since the 1960s, LiDAR (Light Detection And Ranging) technology has been in use. LiDAR has become a common sensor as technology has advanced. Automation, agriculture, archaeology, Information technology and the quantification of various atmospheric components all use LiDARs. The present manuscripts cover the operation of LiDAR, its various varieties, history, and various applications. One may determine the distance between different objects in space and construct a 3D digital representation of the region in front of LiDAR using LiDAR readings. Lidar mapping is a well-known technique for quickly generating precise georeferenced spatial data about the Earth\'s shape and surface features. Lidar mapping systems and their underlying technology have recently progressed, allowing scientists and mapping professionals to investigate natural and built environments at sizes never before feasible, with greater accuracy, precision, and cost effectively provide the best aspects of the culture of human civilization.
Introduction
I. INTRODUCTION
Lidar has proven itself as a reliable technology for gathering extremely dense and precise elevation data over landscapes, shallow-water areas, and project sites. This active remote sensing system is similar to radar, but instead of radio waves, it uses laser light pulses. Lidar is generally "flown" or collected from planes, allowing it to collect points quickly across broad areas. Lidar is also acquired from stationary and mobile platforms on the ground. These data collection methods are popular among surveyors and engineers because they can produce extremely high accuracies and point densities, allowing for the creation of precise, realistic three-dimensional representations of railroads, roadways, bridges, buildings, breakwaters, and other shoreline structures .There are two types of detection in remote sensing Active and passive.
The Lidar system comes under active system as it directs energy at a target and takes reading from the response .Lidar emit light pulses and detect the resultant data to produce data or output based on requirement. The data is usually collected when there is a clear environment example being a clear sky during night. This is done to produce a clear data devoid of major errors. Lidar devices can instantly measure the Earth's surface at sample rates exceeding 150 kHz (i.e., 150,000 pulses per second). A point cloud is a tightly spaced network of extremely precise georeferenced elevation points that can be used to produce three-dimensional reconstructions of the Earth's surface and features. Many lidar systems work in the near-infrared region of the electromagnetic spectrum, despite the fact that certain sensors function in the green band to penetrate water and detect bottom features. In areas with generally clear water, these bathymetric lidar systems can be used to estimate seafloor heights.
II. LITERATURE SURVEY
Spinhirne et al. created Micro Pulse LiDAR. This technology was a solid-state LiDAR for profiling atmospheric cloud and aerosol scattering that was eye-safe and small. The Micro-planned pulse's applications .LiDAR refers to scientific investigations and environmental monitoring that could allow users to work full-time on their projects .cloud and aerosol height observations taken without human intervention structure. Lim et al. employed the LiDAR for their research .physical geography processing This system was implemented.to get immediate access to forest features like canopyheight calculated from LiDAR data Direct c Above-ground biomass and canopy volume could be modelled using height. Access to forest ecosystems' vertical nature opened up new possibilities for forest monitoring, management, and planning.
Hodgson et al. [3] demonstrated an empirical evaluation and error budget of accuracy in Airborne LiDAR- derived elevation. As part of a village-wide large-scale mapping project for Richland village in South Carolina, an accuracy assessment of a recently acquired LiDAR generated data set was undertaken in this study. An Optech ALTM (Airborne Laser Topography Mapper) 1210 system was also used to collect terrain data.
Takeuchi et al. [4] invented the random modulation CW LiDAR. LiDAR is utilised in this study to profile measure a continuous environmental quantity. This includes temperature, humidity, and wind vectors, in addition to air contaminants, cloud, and fog. The LiDAR echo was used to model the response function to a questioning input signal.
Means et al. [5] used Airborne scanning LiDAR to forecast forest stand characteristics. In this study, they looked into the viability of using LiDAR data to forecast forest stand characteristics in a university-industry collaboration. Because it permits direct assessment of crucial structural parameters like height and canopy closure, LiDAR lends itself well to such applications. The researchers discovered that LiDAR data can accurately forecast the height, basal area, and volume of trees. LiDAR data can be utilised to estimate stand characteristics over broad areas or entire forests, according to this study .
LiDAR was utilized by Fernald et al. [6] to determine the aerosol height distributions. Without any data from supporting studies, the system must be well-calibrated, and the physical makeup of the scatterers must be known, according to the research. Their research demonstrates how these issues can be overcome by complementing LiDAR measurements with one more piece of data, namely the layer's transmittance. Their main goal was to offer a thorough analytic solution to the LiDAR equation for situations in which both molecules and aerosols play a substantial role. The solution is then used to analyse LiDAR data.
Mallet et al. [7] developed a topographic full-waveform LiDAR. They gave an overview of the literature on airborne laser scanning (ALS). The method is an active remote sensing technology that generates range data in the form of 3D point clouds. The focus was on full-waveform LiDAR systems, which are novel sensors. Full-waveform LiDAR data can allow an end-user more control over the physical measurement interpretation process and provide more information about the structure and physical backscattering properties of lit surfaces. Theoretical principles of fullwaveform airborne laser scanning were also described in their work.
Hunt et al. [8] worked on and described the CALIPSO LiDAR performance assessment. Their work served as a foundation for development into the Cloud Aerosol LiDAR with Orthogonal Polarization (CALIOP) method.
Zhang et al. [9] did work on LiDAR Odometry and Mapping in Real-time. Their research offered a real- time odometry and mapping approach based on range data from a 6-DOF 2-axis LiDAR. Because the range measurements are obtained at different times, and inaccuracies in motion estimates can cause misregistration of the resulting point cloud, the challenge was critical to solve. LiDAR data was used by
Andersen et al. [10] to predict forest canopy fuel characteristics. Regression analysis was utilised in this study to create predictive models connecting a range of LiDAR-based indicators to canopy fuel characteristics derived from inventory data gathered at plots set inside stands of various condition within Capitol State Forest in western Washington State. The models' reliability was assessed using a cross- validation approach. LiDAR-based fuel forecasts were utilised to build maps of essential canopy fuel parameters over forest areas in the Pacific Northwest, according to the research. This Literature survey offers the review of literature on Lidar system and various researches performed on this technology.
Modeling LiDAR Returns from Forest Canopies was the focus of Sun et al. [11]. To better comprehend the relationship between canopy structure and LiDAR return waveform, a three-dimensional (3-D) model was created and applied. This vegetation LiDAR waveform model was parameterized using detailed field observations and forest growth model simulations of forest stands.
The vertical distribution of plant material and the accompanying LiDAR waveforms in the model were dictated by the crown shape of trees.
Wulder et al. [12] shown the value of LiDAR in sustainable forest management. The current state of LiDAR forest remote sensing, including challenges with instrumentation, data collecting, data processing, costs, and attribute estimate, was addressed in this paper. The future potential for LiDAR and automated data processing are explored in the context of the information demands of sustainable forest management.
Drake et al. [13] used large-footprint LiDAR to estimate tropical forest structural features.
The study's main goal was to see how well large-footprint LiDAR devices could recover forest structural properties over a range of land cover types, from pasture to secondary and primary tropical forests. The findings confirmed the ability of large-footprint LiDAR instruments to estimate important structural attributes in dense tropical forests, including biomass, and when combined with similar results from temperate forest studies, the Vegetation Canopy LiDAR (VCL) mission framework was strongly validated.
Csanyi et al. [14] worked on improving the accuracy of LiDAR data. Ground targets created with LiDAR. Their research suggested that LiDAR - specific ground targets be used to support applications that demand exceptionally high engineering scale mapping precision, such as transportation corridor mapping. The most favourable LiDAR target design was determined through simulations, and targets were produced based on the simulation results. They discussed the best LiDAR target design, the target identification algorithm, and extensive performance analysis, including an assessment of the potential LiDAR data accuracy improvement utilising LiDAR-specific ground control targets for various target distributions and flying characteristics. Spinhirne et al. [15] carried out research on tiny eye-safe LiDAR systems. They looked into a new LiDAR technology that was small and safe for the eyes. Solid-state lasers and detector advancements allowed for more efficient LiDAR designs that matched the requirements for continuous atmospheric monitoring. Micropulse LiDAR is a technique that uses visible wavelengths and kHz pulse rates, YLF lasers, and micro Joule pulse energies. Beam expansion provides eye protection, which is a critical element.
In 2D LiDAR SLAM, Hess et al. [16] worked on real-time loop closure. Operating with restricted computational resources is required for developing a portable capturing platform. They demonstrated how the backpack mapping platform does real-time mapping and loop closure at a precision of 5cm. A branch- and-bound strategy is utilized to compute scan-to-submap matches as constraints in order to accomplish real-time loop closure.
III. METHODOLOGY
The methodology used in this study are:
A. Data Handling
The basic terminologies required in understanding Lidar are mentioned here.
B. Data Collection
It is the process of collecting and measuring information on targeted variables in an established system, allowing one to answer relevant questions and evaluate results. Sensors mounted on Aircrafts or other types of aerial transports that can be used to map the area needed for mapping the topography that will be needed for data production.
C. Data Types
Lidar data, like other elevation data, can be recorded in a variety of forms. The native data is given as point clouds, which can be processed into DEMs or TINs (surfaces), which can then be used to build contours (lines). Different types of data are mentioned under.
???????1. Points
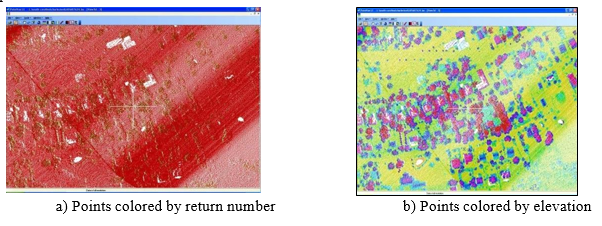
Point data is frequently saved in LAS format, which is "a binary file format that preserves information specific to the LIDAR nature of the data while without being unduly complex" (ASPRS, 2007). Lidar data can include much more information than just x, y, and z values (Figure 3 -5), such as the strength of the returns, point categorization (if done), number of returns, time, and the source (flight line) of each point. Text files containing this information are also available; however, their size (several million entries with many text characters) makes them difficult to deal with .Data preparation is the process of gathering, combining, structuring and organizing data so it can beused in business intelligence (BI), analytics and data visualization applications.
Examples of points as Lidar data
2. Digital Elevation Models (DEM)
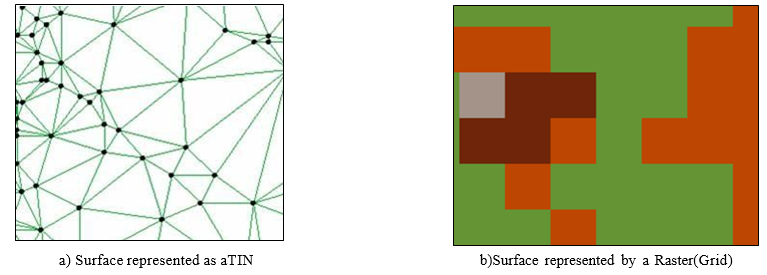
For DEM data, typical raster file formats include GeoTiff (.tif), Esri Grid (.adf), floating point raster (.flt), and ERDAS Imagine (.img). Data is occasionally provided in TIN format (e.g., Esri TIN). Point files are used to construct images in raster cases, which can subsequently be interpolated using a variety of approaches.
DEMs are created using simple (e.g., nearest neighbour) to complex (e.g., kriging) gridding methods that can produce somewhat different surface types. The most common surfaces are those created using the TIN or inverse distance weighted (IDW) approaches. The data and the DEM's intended use decide the optimum interpolation method.
Examples of DEM
3. Contours
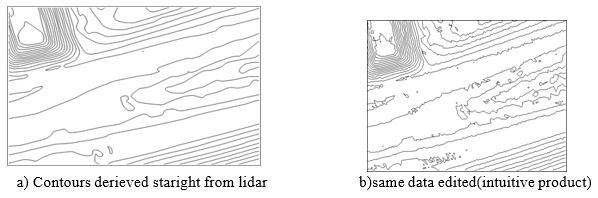
Contours are most usually produced from a pre-constructed DEM or TIN and are commonly available in vector formats (e.g.,.shp,.dxf). Contours are one of the most frequent ways to show elevations, and they may be found on USGS quad maps. Contours obtained directly from lidar data (Figure 3-10A) are accurate but not "clean," and they frequently require interpolation, simplification, smoothing, or manual editing to produce a result that can be comprehended by the human eye. The position of contours can move somewhat during the cleaning and editing process, and certain minor features may even be erased. Because lidar-derived contours are most usually utilised for cartographic reasons, whereas the original lidar DEMs or TINs are employed for analytical purposes, this trade-off between accuracy and interpretability is typically acceptable.
To obtain appealing contours with the accuracy of the base lidar data, highly accurate manually generated breaklines (i.e., vectors marking slope breaks) are necessary; this is often a very expensive operation. To construct three-dimensional breaklines along certain linear features, photogrammetric techniques are widely utilised. A technique known as "lidargrammetry" has lately been used. Lidargrammetry takes the intensity values from the lidar points as the "photo," which is then processed into a three-dimensional representation using point elevations. Breaklines can then be defined using the three-dimensional image.
Examples of contour
Despite the fact that contours are less accurate than the data from which they are derived, they are crucial in establishing the accuracy of lidar data. This is the case because to their widespread use in engineering and other popular representations. Lidar data is used in a variety of projects are gathered to "enable the production of 2 ft contours" or other similar statements referring to the data's vertical precision but not its horizontal resolution. The contour interval that can be sustained for American Society for Photogrammetry and Remote Sensing (ASPRS) Class 1 contours is around 3.0 x RMSE, whereas it's around 3.5 x RMSE for National Standard for Spatial Data Accuracy contours (NSSDA). Both of these requirements were developed as a result of the conversion from old survey methods, which required data used to produce contours to be at least twice as accurate as the contours they defined. So, in the past, data accurate to 1 foot (at the 90% confidence level) could be used to construct 2-foot contours; the ASPRS and NSSDA values simply correspond to the 93 and 95 percent confidence levels, respectively. There are other ASPRS contour classes (such as Class 2 and Class 3) that are less strict than Class 1. The ubiquitous use and creation of contours continues to play a big part in the accuracy criteria for lidar data collectors, regardless of standard.
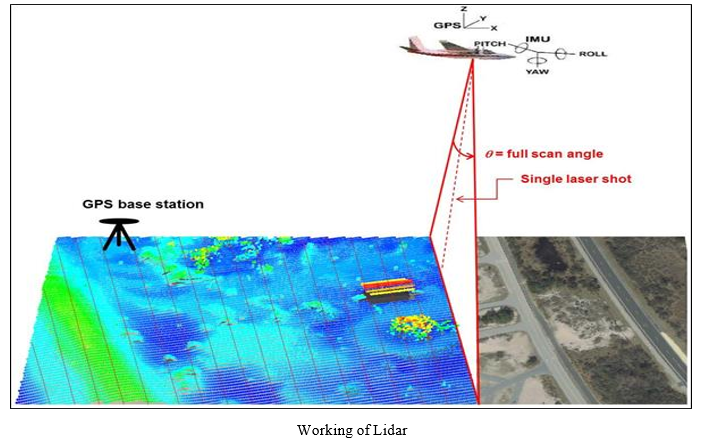
IV. WORKING OF LIDAR SYSTEM
LiDAR is based on the concept of light reflection. A light beam is shone on a surface, and the time it takes for the beam to return to its source is measured. The LiDAR system fires laser light at the target and calculates the wavelength and travel time by measuring the reflected light. It can compute the distance and draw a digital representation of the object using these data. Because light travels at such a high rate, LiDAR can quickly calculate the correct distance. Equation 1 is the formula employed by the analysts to compute thedistance.
D = c (?T/2) (1)
where,
D = The distance of the object c = Speed of light
? = Time required by the light to travel
The LiDAR system illuminates the surface with a series of laser lights. The time it takes for the reflected light to reach the sensor is measured by the system's sensor. This process is repeated until a complicated surface map is created with the help of various data modeling devices .Once the data is modeled the data can be converted as required depending on the availability of required data.
V. REMARKS
???????A. Applications of LIDAR
Lidar technology is implemented in many fields in Modern age ranging from agriculture to space exploration to robotics ,some of the most common uses are following:
- Agriculture: Seed and fertiliser dispersal, as well as scanning crops for weeds, are all done by Lidar robots. It also selects where to spray fertiliser based on the farmland's location. Insect detection can also be done with Lidar. Lidar is seen as a essential tool that can increase the yield of the crops through scientific methods.
- Archaelogy: Lidar technology can be used to investigate the forest canopy as well as determine ground features. It can be used to generate a high-resolution model of an archaeological site in order to reveal topography that was previously impossible to discern. It can be used to better understand the evolution of humankind.
- Autonomous Vehicles: Lidar is utilised to detect and avoid obstructions so that laser beams can effortlessly traverse along the path.Current generation vehicles like Google car and Tesla uses similar technology to determine obstructions.Implementation of Lidar technology will help reduce traffic accidents that plague the country.
- Atmosphere: Lidar may be used to profile clouds, measure winds, study particles, and quantify a variety of atmospheric components, providing data that can be used to determine surface pressure, greenhouse gas emissions, photosynthesis, fires, and humidity, among other things. Researchers will be able to get better data by using Lidar to combat global warming.
- Law Enforcement: LiDAR speed guns are used by police to measure and restrict the speed of passing vehicles. It's also utilized in forensics to aid in crime scene investigation, such as determining the location of things and doing blood tests. Sophistcated modelling techiniques can be implemented to counter illegal operations in world.
- Military: Lidar technology can be used to determine the position of enemy bases ,troop displacement, understand biological and chemical components such as Aerosol ,vehicle placement etc. Lidar can provide tactical Advantages in warfare.
- Mining: Lidar systems are used to calculate ore volumes by scanning regions of ore removal on a regular basis and comparing surface data to prior scans. For robotic mining vehicles, such as the Komatsu Autonomous Haulage System (AHS) utilized in Rio Tinto's Mine of the Future, LiDAR is also employed for obstacle identification and avoidance.
- Robotics: In robotics, LiDAR is utilized for scanning the environment as well as object recognition. It allows for the precise landing of robots and human vehicles. Robots can uses sensors equipped with Lidar to better understand the surrounding and calculate data thus increasing efficiency.
- Tsunami Modeling: Lidar is used to inform systems that notify individuals in their region about the potential of a tsunami. It's also used to figure out how high and deep an underwater coastline is. Experts can anticipate which places will be most harmed by a tsunami using LiDAR data incorporated into a GIS.
- Forestry: Lidar technologies have proven to be beneficial in improving forestry management. Individual tree heights, crown breadth, and crown diameter are calculated using these. Total plot information such as canopy volume, mean, minimum, and maximum heights, and vegetation cover estimations can also be estimated using Lidar.
- Renewable Energy: Basic needs for capturing solar energy, such as optimal panel location, can be identified using Lidar. It's also used to calculate wind speed and direction so that wind farm operators can build and install turbines. It can be effectively used to counter global warming.
Conclusion
Lidar is a light-throwing device that measures the time it takes light to reflect. It has existed for more than fifty years. It was first used to calculate the distance between satellites. Lidar systems are commonly used as the primary obstacle detection sensor in self-driving cars. There are numerous other Lidar uses available, such as aerial Lidar systems for territorial mapping. Rain forecasting, water depth mapping, and ship navigation are just a few of the environmental applications of airborne Lidar’s. Archaeology can also benefit from pulse Lidars.ng Cloud computing and MapReduce together. We discovered that Lidar pulse energy can be very low, and that pulse energy is what determines how far the Lidar can throw and receive the signal. The energy of a pulse can be as high as 1J. The mean square error of a typical Lidar system is a few centimetres. Lidar systems could be as precise as a micrometre. Lidar accuracy should normally exceed 90%, and for essential applications such as autonomous vehicles, it should be greater than 95%. There are Lidar systems on the market that can achieve up to 99.9% accuracy at a cost compromise. The Lidar wavelength can be in the visible light transmission range of 400 to 700 nm, but the preferred Lidar wavelength is 1064 nm in the infrared region. Overall, with low-cost Lidar systems on the market, we predict the trend in Lidar as a sensor to grow tremendously in the near future, with Lidar systems accounting for more than half of all automation. Lidar are less expensive than RADARs, but they must sacrifice precision, hence Lidar technology is the way of the future.
References
[1] J.D. Spinhirne, Micro pulse lidar, IEEE Transactions on Geoscience and Remote Sensing 31(1), 48 (1993) [2] K. Lim, P. Treitz, M. Wulder, B. St-Onge, M. Flood, Li- dar remote sensing of forest structure, Progress in physical geography 27(1), 88 (2003) [3] M.E. Hodgson, P. Bresnahan, Accuracy of airborne lidar- derived elevation, Photogrammetric Engineering & Re- mote Sensing 70(3), 331 (2004) [4] N. Takeuchi, N. Sugimoto, H. Baba, K. Sakurai, Random modulation cw lidar, Applied optics 22(9), 1382 (1983) [5] J.E. Means, S.A. Acker, B.J. Fitt, M. Renslow, L. Emerson, C.J. Hendrix, et al., Predicting forest stand characteristics with airborne scanning lidar, Photogrammetric Engineering and Remote Sensing 66(11), 1367 (2000) [6] F.G. Fernald, B.M. Herman, J.A. Reagan, Determination of aerosol height distributions by lidar, Journal of Applied meteorology 11(3), 482 (1972) [7] C. Mallet, F. Bretar, Full-waveform topographic lidar:State-of-the-art, ISPRS Journal of photogrammetry and remote sensing 64(1), 1 (2009) [8] W.H. Hunt, D.M. Winker, M.A. Vaughan, K.A. Powell, P.L. Lucker, C. Weimer, Calipso lidar description and performance assessment, Journal of Atmospheric and Oceanic Technology 26(7), 1214 (2009) [9] J. Zhang, S. Singh, in Robotics: Science and Systems,vol. 2 (2014), vol. 2 [10] H.E. Andersen, R.J. McGaughey, S.E. Reutebuch, Estimating forest canopy fuel parameters using lidar data, Remote sensing of Environment 94(4), 441 (2005) [11] G. Sun, K.J. Ranson, Modeling lidar returns from forescanopies, IEEE Transactions on geoscience and remote sensing 38(6), 2617 (2000)
Copyright
Copyright © 2022 Mr. Pramod K, Akshay M C. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43007
Publish Date : 2022-05-20
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online