

Ijraset Journal For Research in Applied Science and Engineering Technology
Line Follower and Bluetooth Controlled Robot
Authors: Jajula Abhinay, Ayyala Revanth Reddy, Kankanala Koiushik Reddy, Nimushakavi SN Murti Sarma Smieee
DOI Link: https://doi.org/10.22214/ijraset.2023.50187
Certificate: View Certificate
Abstract
Our proposal is a vehicle that can follow a straight path. It can follow a line until it reaches the end of the line and then pause until the return instruction is issued. This can be used to convey items from a car to a destination (at the end of the line) within a house or small work space. Another advantage of the project is that it can be controlled via Bluetooth. A car is a differential wheeled vehicle, which is a mobile vehicle with two independently powered wheels on either side of the vehicle body. To operate the automobile through bluetooth, a mobile application for the joystick was downloaded. We may choose whether the car should act as a line follower or Bluetooth via the application.
Introduction
I. INTRODUCTION
The mobile equipment known as the "Line follower robot" can find and follow lines that have been placed on the floor. The path is usually predetermined and may either be seen, like a black line on a white surface with a highly contrasted hue, or it can be invisible, like a magnetic field. Because of this, the Infrared Ray (IR) sensors on this type of robot should be able to detect the line. Following that, dedicated transition buses provide the data to the CPU. As a result, the CPU will choose the appropriate orders before sending them to the driver, who will then direct the line follower robot down the course. Miniature model cars, vans, buses, lorries, or buggies that can be remotely controlled using a specialised transmitter or remote are known as radio-controlled automobiles (or RC cars for short). A bluetooth-controlled car is similar to an RC car, except steering and direction control are handled by a smart phone via bluetooth connectivity.
II. AIM OF THE PROJECT
The goal of this project is to create a line-following automobile that can also function as a bluetooth controller car.
III. HARDWARE COMPONENTS USED
- ESP32 DOIT DEVKIT
- L298N motor driver
- XL6009 DC_DC buck boost converter
- IR sensor MODULE
- BO motor
- Caster wheel
A. ESP32 DOIT DEVKIT
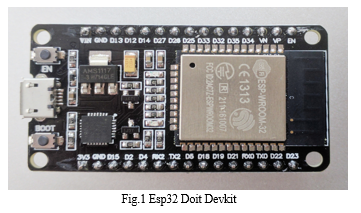
The ESP32-WROOM-32 is a powerful, universal Wi-Fi + Bluetooth + Bluetooth LE MCU module that can handle a broad range of functions, including voice encoding, music streaming, and MP3 decoding, as well as low-power sensor networks. The ESP32-D0WDQ6 chip* is the heart of this module. Scalable and adaptable design features are included into the integrated chip.
The CPU clock frequency may be changed from 80 MHz to 240 MHz, and there are two independent CPU cores. The chip also contains a low-power coprocessor that may be utilised in place of the CPU to conserve energy when carrying out activities that don't need a lot of processing power, including peripheral monitoring.
A wide variety of peripherals are included into the ESP32, including capacitive touch sensors, Hall sensors, an SD card interface, Ethernet, high-speed SPI, UART, I2S, and I2C. Note: * Please refer to the paper ESP32 Datasheet for further information on the component numbers of the ESP32 family of chips.
A wide range of applications can be targeted thanks to the integration of Bluetooth®, Bluetooth LE, and Wi-Fi; Wi-Fi enables a direct connection to the Internet via a Wi-Fi router and a large physical range, while Bluetooth enables the user to easily connect to the phone or broadcast low energy beacons for its detection. The ESP32 chip is excellent for battery-powered and wearable electronics applications since its sleep current is less than 5 A. In order to achieve the greatest physical range, the module offers a data rate of up to 150 Mbps and 20 dBm output power at the antenna.
As a result, the module provides the finest performance for electronic integration, range, power consumption, and connection as well as parameters that set the industry standard. The free RTOS with LwIP operating system was selected for the ESP32, and TLS 1.2 with hardware acceleration is also integrated.
In order to allow consumers to update their goods even after they are released with the least amount of expense and effort, secure (encrypted) over the air (OTA) upgrade is also offered.
B. L298N Motor Driver
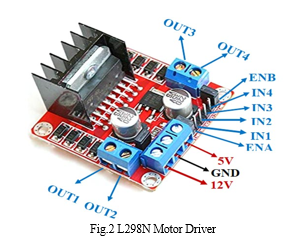
- L298N 2A is the driver model.
- Double H Bridge L298N Driver Chip
- Maximum Motor Supply Voltage: 46V
- Maximum Motor Supply Current: 2A
- 5V Logic Voltage
- Driver Voltage: 5 to 35 volts
- Driver Current: 2 A
- 0–36 mA of logical current
- 25 W Maximum Power
- A motor's current sense
- Heatsink for improved efficiency
- A LED power-on indicator
C. XL6009 DC_DC buck Boost Converter

The XL6009 Step Up Down module is one of the most often utilised modules when a set output voltage is required, regardless of whether the input voltage is above or below that output value.
This Buck Boost Converter is automated. In turn, this allows the module's output voltage to be locked at a given value while allowing input to be greater or lower than the output voltage. The output voltage is modified using the integrated variable resistor.
- Buck Boost Converter Automatic
- 4A output current
- 400 kHz is the switching frequency.
- 3.8 to 32 volts of input voltage
- 1.25 to 35 volts of output voltage
- Efficiency of Conversion: 94%
- A non-isolating buck boost converter
D. IR Module
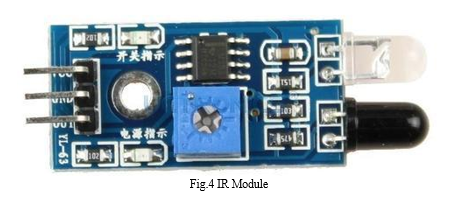
A pair of infrared transmitter tubes and a receiver tube are part of the IR Sensor module, which has excellent ambient light adaptation capabilities. When the infrared emitting tubes encounter an obstacle detection direction (a reflecting surface), the infrared is reflected back to the receiver tube receiving, and after a...
Range for Measuring Distance (CM): 2 30
48 x 14 x 8 mm are the dimensions.
E. BO Motor

Lightweight DC geared motor called a "Bo motor" (battery operated) that produces good torque and rpm at lower voltages. You may get bo motors with different rated speeds here.
IV. HARDWARE COMPONENTS AND APPS USED
A. Arduino IDE
The Arduino Integrated Development Environment, generally known as the Arduino Software (IDE), is also available. It includes a text editor for writing code, a message box, a text terminal, a toolbar with buttons for frequently used activities, and a variety of menus. It connects to the Arduino hardware to upload programmes and communicate with them. I also provide support for additional devices, such esp32.
B. Dabble APP

By turning your smartphone into a virtual I/O device with Dabble App, you can interact with hardware through Bluetooth, control it, and access other features like proximity and accelerometer sensors. For different DIY projects or Internet of Things (IoT) applications, you may use Dabble as a Bluetooth Controller App for Arduino Uno-Mega-Nano, ESP32, and evive. In the Arduino IDE, you may write the programme.
console module,
This module offers three distinct ways to set up the gamepad controllers:
- Digital Mode: This mode has 10 buttons, including Up, Down, Right, Left, Triangle, Circle, Cross, Square, Select, and Start. It is the standard mode.
- Joystick Mode: In this mode, the Joystick, which delivers data in polar coordinates, takes the place of the Up, Down, Right, and Left buttons. The angle ranges in 15° increments from 0° to 360° while the radius varies from 0° to 7°.
- Accelerometer Mode: This mode resembles joystick mode in several ways. To move the button, you must tilt your smartphone rather than slide it across the screen.
V. BLOCK DIAGRAM
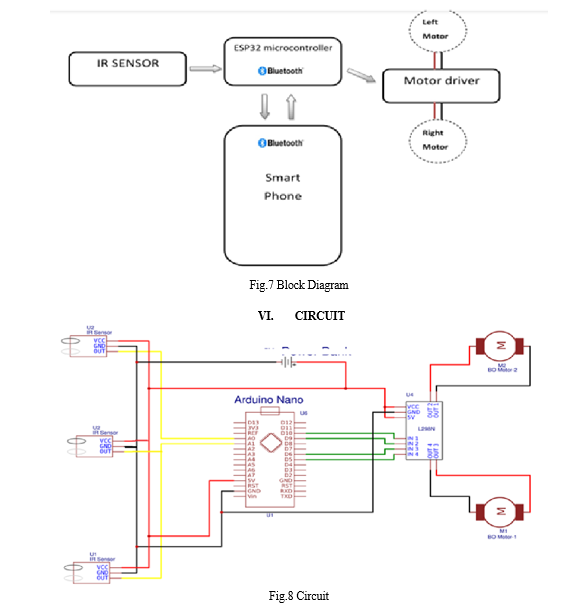
VII. WORKING
When " Δ " is pushed, the car follows lines.
Vehicle operates as a Bluetooth-controlled automobile when "?" is pushed.
Line follower: In our project, three IR sensors are symmetrically situated on the front of the car and provide high output when they are on a black line and low output when they are on a white line. There are five different ways an IR sensor might be placed on a black line when a line follower is present:
- Go straight, Whit Black White / 010
- tight right White Black Black /001
- White White Black / 110 tight left
- Turn right at White White Black / 001.
- Turn left after Black White White at 100.
In the first scenario, the car is straight.
Secondly: tight right
Case three: tight left
Fourth case: make a right
Fifth case: turn left
Vehicle is at rest in all other scenarios.
An alert is sent saying "destination arrived! No:#" when the destination is reached (when all IR sensors are black, which is considered the destination).
Use the cross key on your gamepad to go back and come back.
In the gamepad of the mobile application, press "X." The vehicle will turn around and signal that the turn at the destination <Destination NO:#>has been performed. To return, use the circle key on the gamepad. Following the line, the car starts to return after hitting the "O" key.
A microcontroller will receive the joystick's angle when the automobile is Bluetooth-controlled. When the joystick is moved, the received angle is taken as input and the matching output is set. This input goes to the L298N motor driver's enable1, enable2, a1, a2, and b1 transistors.
VIII. RESULT
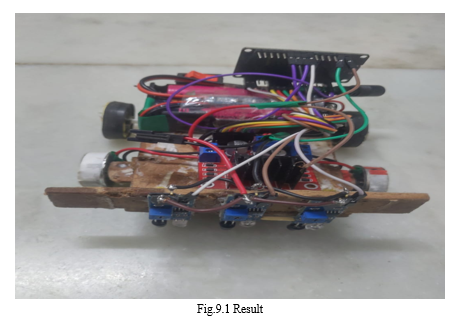
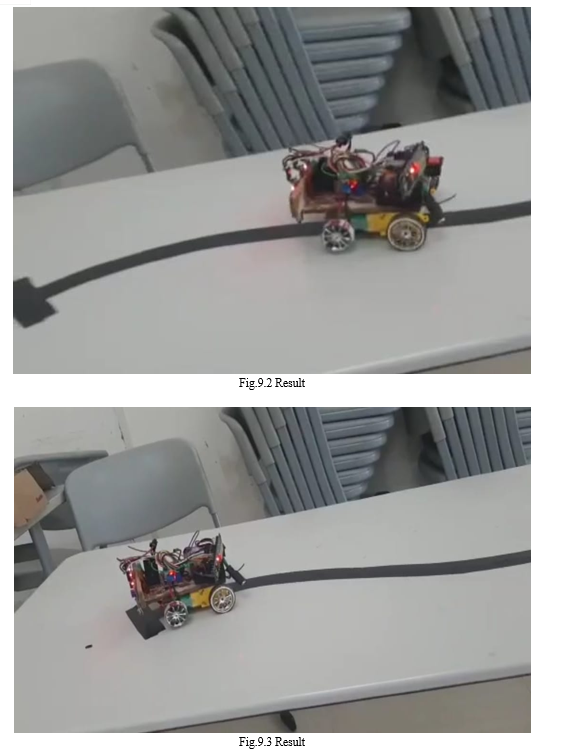
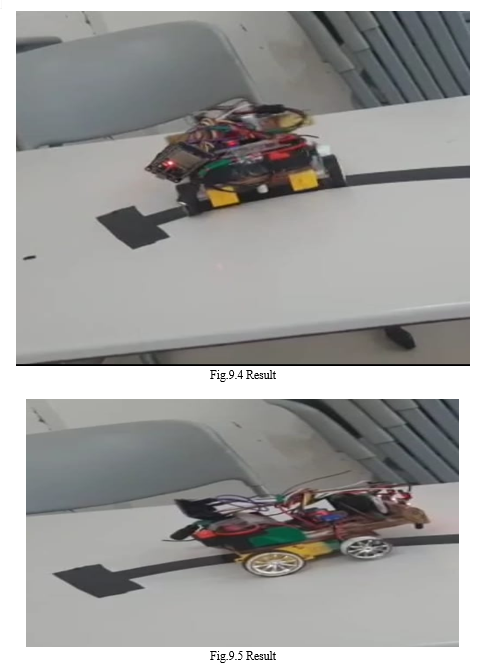
IX. RESULT EXPLANATION
When line follower mode is selected, the vehicle can follow a straight line. When it arrives at its destination, a message will appear asking you to hit the "X" key to go back. After hitting "X," it turns as it pleases and then comes to a stop. A new notice now urges you to press "O" to go back. The line to return back is followed after hitting the "O" key. When the "Square key" is depressed, the project functions as a bluetooth-controlled automobile.
X. ADVANTAGES
- Most of the time, these robot movements are automated.
- The robot's system is similar to "instal once, forget it."
- It is reasonably priced.
- These robots are easy to construct.
- They are also appropriate for lengthy distances.
XI. DISADVANTAGES
- Since the IR photons should reflect from the specific direction, there must always be a path that is either white or black.
- Lessens interactions with people.
- The cost of designing an application is high.
- Sluggish motion and instability on lines of varying thickness or at acute angles.
Conclusion
The use of machines is rising these days, therefore our line follower robot has a few benefits including the ability to be controlled and utilised automatically, which leads us to believe that it can fulfil certain daily demands and has further potential. One of the most fundamental robots is a sensor-based black line follower, which follows a black line on a white backdrop. This robot may be used for a variety of home and commercial purposes, including carrying objects, cleaning floors, providing delivery services, and transportation.
References
[1] http://www.engineersgarage.com/tachometer-microcontroller-circuit-project. [2] https://www.arduino.cc/en/Guide/Introduction. [3] Komonya, S. Tachi, K. Tanie, \"A Method for Autonomous Locomotion of .Mobile [4] Robots,\'\'in Journal of Robotics Society of Japan, vol. 2, pp.222-231, 1984. [5] https://deepbluembedded.com/esp32-pwm-tutorial-examples-analogwrite-arduino/
Copyright
Copyright © 2023 Jajula Abhinay, Ayyala Revanth Reddy, Kankanala Koiushik Reddy, Nimushakavi SN Murti Sarma Smieee . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET50187
Publish Date : 2023-04-08
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online