

Ijraset Journal For Research in Applied Science and Engineering Technology
Low Cost Design of 3D Printed Prosthetic Hand with IR Sensor
Authors: Desai Akash Chandrakant, Shaikh Sohil Jahangir, Sharma Abhishek Rajendra, Shaikh Tousik Rafik, Iqbal Mansuri
DOI Link: https://doi.org/10.22214/ijraset.2022.40870
Certificate: View Certificate
Abstract
One of the most common problem that disabled persons with amputation in upper limb they couldn’t buy a commercial prosthetic hand because it very expansive and up to thousands of dollars, Researchers and developer aspire to manufacture an prosthetic hand that performs the same functions and activates of natural hand. This paper includes the design and development of a low-cost prosthetic hand (less than a1000$) that capable of wearing from the persons who has amputation in the hand, this design represent a hand with five finger capable of movement and gripping the object, rotatable wrist and socket connect with amputation body capable to up and down the forearm . The design of this prosthetic hand possess 18 degree of freedom (DOF), 3DOFfor each finger except the thumb has 4DOF, 2DOFfor wrist and 2DOF for socket. The design prosthetic hand work by under actuated system 7 servo motors with tendon to move the fingers material (PLA). The design element and tesht in solid work to avoid overlapping between fingers and then after manufacture the design try it in real life to movement and gripping the object.
Introduction
I. INTRODUCTION
The human hand is an amazingly complex set of mechanisms. It can be said that the hand is the brain’s ultimate tool, and loss of even one of these amazing tools has a profound impact on a person’s life the human hand has a full 22 degrees freedom (1) which are created by 27 unique bones and 30 muscles (2). Studies indicate that than ten million people in the whole world they are suffer from amputated limbs or any parts from the body (3). Almost thirty five percent of amputated limbs are amputate of arm or part arm. Until a few years ago, the evolution of prosthetic hand that bring back the functions and dependability for people who have amputation, the plan as development of any prosthesis depend both on the many – sided quality of the body part being supplanted and rehabilitative necessities of the prosthesis client. Upper limb prostheses are set for those individuals who have either part or whole upper limb absence, which may either be acquired (through amputation ) or inborn the prosthetic hand is the part that can mimic the movement and function of the human hand in daily work. In Riaan furies, explain the design and evolution of a modular mechanical design for a prosthetic hand that can be upgraded from a pure mechanical system to a mechatronic system, depending on the amputee’s needs. The test that have been conducted with the functionality of the prosthetic hand is presented and discussed.
In GK jones and R stop forth, they steady on the mechanical design of the major hand component, and an overview of the programmed control system is described, with possible future addition of amputee feedback, the touch hand II printed in 3D printed prosthetic hand has been developed to improve on the first design iteration. In order to goal of providing transadaial amputees with a low-cost alternative prosthetic hand.
This paper study a kinematic motion and a method to design a low cost prosthetic with full function of movement and analysis each part of figure manufacture of each part in prosthetic hand assemble it and then test to handle the objects .
II. LITERATURE REVIEW
- BERNHARD VODERMAYER, MARKUS NOWAK (2015): SYSTEM ARCHITECTURE- We started frim a testbed where analog EMG single are sampled and converted to digital data to ease the single processing using DAQ card with on- bored AD- converted chips, as illustrated. The digital data is then sent to a computer or an interred microprocessor for processing of the single. This processing stage includes future extraction and classification.
- SKYLER ASHTONDALLEY (2013): The implementation of series elasticity provides non_ kinematic coupling (i.e. enables conformal grasping) between the DIII-V fingers. Of equal importance, the series elastic elements enable control of grasping force despite the presence of the two-way cloches by leveraging the position control loop (enabled by the Hall Effect sensor in the motor units) that is already in place around the motor units. The hybrid position/force control aspect of the hand is designed to function as follows.
- ALBA PEREZ-GRACIA, MARCO P. SCHOEN (2009): A desired trajectory is usually specified in Cartesian space and the trajectory controller is easily performed in the joint space. Hence it is necessary to convert Cartesian trajectory planning to the joint space (25)-(27). Using inverse kinematic the joint angles of the each finger need to be obtained from the know fingertip position (joint space). Then the angular velocities and angular acceleration of each finger can be obtained from the velocities of finger trip by Jacobean.
A. Problem Of Statement
- Energy Expenditure: Prosthetic hands can requires height energy expenditure. Since bending is typically restricted to two joint that cannot move independently the grip is not adaptive. That is the fingers do not wrap around the object as fingers in the human hand do.
- Weight: Users frequently express a preference for lighter prosthetic hand. The interface between the prosthetic socket and residual limb is soft tissue.eveb with a solid fit, the attachment may feel insecure because three is a false joint minimizing prostheses weight can reduce this common problem.
- Cable System: The body-powered hands report replacement of cable as their most frequent maintenance problem and one that cannot be solved at home because specialized tools are required
- Finger Movement: Most current prosthetic hand only bend at the metacarpophalangeal joint in each of the first two fingers. The remaining two fingers are passive finger flexion therefore, does not accurately mimic the movement of the human hand. Pat designs using multiple phal aged and join within each finger to improve finger movement have proven disappointing
- Function: A recent survey of persons using such prostheses revealed a preference for a new prosthesis that is better able to hold both small and large object
B. Aim Of Objectives
In earlier time, human being lost their human body part i.e. hands, legs etc. they did replacement of part by means any wooden or metal prosthetic part. But that had many constraints and limitation. It was only a state part of the body .as that was made by wooden or metal material tht would increase the weight of structure. Because of that it was hard to carry body part. Another limitation. For same was it would create resistance to the regular human body motion. At some instance it only be a non-useful human part. Only purpose of that would be for prosthetic criteria. But as time passed evolution occurred in that field human didn’t want prosthetic hand for just an aesthetic purpose they want fully functional prosthetic hand as replacing of it. As described above. Earlier the main origin of thief invention is to just provide the prosthetic hand. After that many development I this field occurred and now a day. We had a fully functional prosthetic hand that can do most of every normal function of human hand. As improvement and development in technology in mechanical electrical, electronic and communication etc. we had technical gadgets like sensor that would help use to provide accurate and desired motion to the prosthetic hand. But as well all know that every coin has has two side improving technology on economic criteria of the prosthetic hand. As part of literature survey, we found that the fully functional sensor prosthetic to hand cost us approximately 2 lack to lack that clearly not desirable for every people.
Due to above reasons we aligned our project in direction to provide a cost effective functional human prosthetic hand. To provided cost effective prosthetic hand. Firstly we need to manufacture it cost effectively. So we dig deep about different manufacturing process and finally we found appropriate manufacturing process for our invention so we came up with additive manufacturing process. By this manner we were fulfill aim of invention of providing cost effective functional prosthetic hand.
III. DESIGN METHODOLOGY
While designing the prosthetic hand we must satisfy some parameter of it. As we are going to develop human prosthetic hand, so aesthetic of prosthetic hand is one the most essential parameter of designing. Simultaneously with the aesthetic of the prosthetic hand safety is also important criterrria of designing. Failure of structure must be avoided. Prosthetic hand must satisfy the user expectation, so considering all the measure of the designing we develop the software model of our human prosthetic hand. The software modal of our human prosthetic hand is as shoun in below figure
A. Design the Basic Prototype
Computer assisted design Solid work is a computer design software package made for modelling solid mechanical components and aaemblies solid work is a popular tool in the engineering industry and has been used extensively in designing and analyzing mechanical compost.
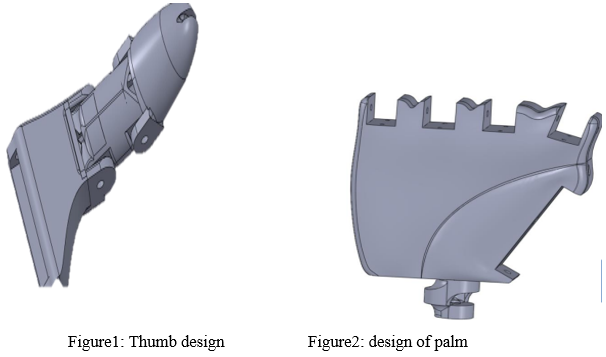
- Thumb: The thumb has also been designed in a similar fashion most commercial and research prosthetic hands aim to to provide at leases two degrees of freedom in the thumb. This thumb how ere only provides a single degree of freedom-it can open /close a single way. Guide holes have been incorporated into design of the finger and thumb to optimize tendon orientation and prevent the tendon lines from getting caught on a sharp edge.
- Palms: Each finger connects to palm by polypropylene pins. The bottom of the palm incorporates part of the wrist rotation mechanism discussed on the following page
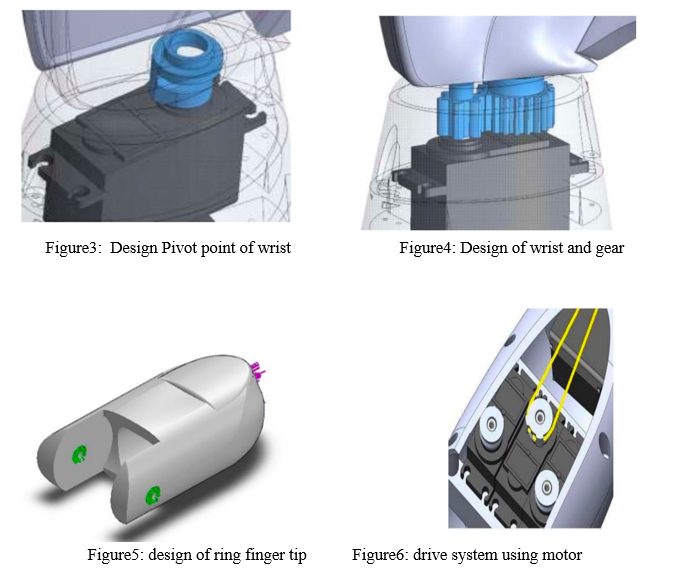
- Wrist: Initially a gear driven system was implemented to control wrist rotation. A small gear was 3D printed and pressed onto a servo shaft which would then drive a large gear connected to the palm section. Solid work physical dynamics tools were used to test how well the gears meshed together before Amy component were printed. Unfortunately the gears did not rotate in a smooth manner. This is because 3D printer produce when printing in ABS plastic. The teeth or the gear warped ever so slightly which resulted in poor meshing and rotation of the gears. The design could have been adjusted for this warping by increasing the mechanical tolerance to allow for bigger gaps between gear teeth. The problem with gear system arose from the standard servo motor can only rotate to a maximum of +90 degree. The driving gear mounted on the servo was 2.5 times smaller than the driven gear on the hand. This meant that meant that by using a standard servo to drive the small gear only =36 degree of rotation about the wrist would have been achievable this was going to be addressed by using a continuous rotation servo- which can rotate indefinitely. Continuous rotation servo have no angular position feedback in order to rotate the hand to a specific position a mechanical block would have to be designed or less accurate open control methods would have needed to be bused. To avoid these problems it was decided to drop the gear system and instead press fit the palm section directly onto the shaft of the servo in the forearm as shown fig 3. a passage through the pivot point of this joint allows the tendons to pass from the fingers through to the forearm. This allows for +90 degrees of rotation about the wrist and eliminates the problem of angular position control. The challenge with this design is providing enough strength. A large opening around the base cylinder. A passage through the pivot point of this joint allows the tendon to pass from the fingers through to the forearm. This allow for +90 degrees of rotation about the wrist and elimination the problem of angular position control. The challenge with this design is providing enough strength. A large opening around the base cylinder had to be left for the tendon to pass through as the wrist rotates through 1800 , this big opening concentrate stead around the small cross sectional are near the base of the Palma. The images on the previous page show a wrist model which snapped during testing as it was too weak. The latest model operates on the exact same principle but includes far more material around the base to increase the composts strength and prevent fractures occurring at this a small horizontal ridge around the outside of the small cylinder help transfer lateral load, to the outer forum shell. The tendons bottle neck as they pass through the small wrist opening to the motors in the forearm wrist rotation of 1800 causes the tendon to twist and overlap which in undesirable rotate around as is would cause the tendons to twist around and become entangled.
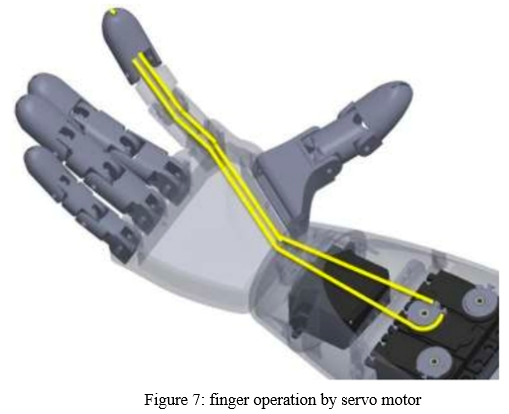
- Drive System: The tendon wrap custom 3D printed servo horn creating a closed loop show fig 6 as the servo motor rotates one way it pulls on the tendon and closes the finger to open the finger the motor is rotated in the opposite direction.
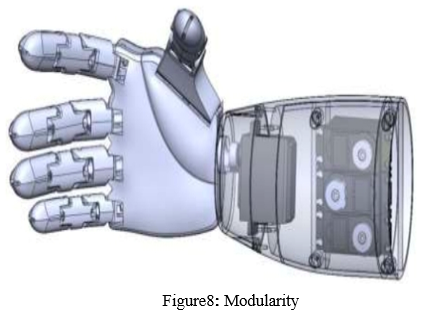
The image below shows the artificial tendon drive for the index finger all other tendon have been omitted for clarity the thumb index and middle finger are connected to individual servo motors because the interior space of the arms limited the ring hand pinky fingers have both been tied to the same servo, meaning they open and close in tandem.
IV. MODULARITY
Amputation can occur anywhere along the arm and is every case.an ideal design facilitates connection to a stump located anywhere along the arm the hand and wrist section could now be fitted to a person amputated along their forearm.
This hand / wrist module can now also be connected to an elbow section which provides a solution for an above elbow amputation. Method of mechanically fitting this prosthetic hand to an amputee have only briefly been touched on is this thesis and will be discussed father in the future work section. In order to design a socket connection a mold or CAD rendering of an amputees stump would be required thermoforming plastic could be used to around the stump and some form of a harness or straps would most likely be required to produce a stable connection.
Conclusion
The prosthetic hand designed approximate the function abilities of human hand very well. A number of movement are produced and number of variety object can be grasped in a natural way. The five fingers have 16 degree of freedom drive by five actuator which enables the movements each finger independently which offers more manipulation abilities. The kinematic motion analysis of the finger showed that: the finger is not overlapping between them except the thumb in order to get the best gripping of object wit out slipping.
References
[1] Wilson B. History of amputation surgery and prosthetics. In: Bowker JH, Michael JW, editors. Atlas of limb prosthetics: surgical prosthetic, and rehabilitation principal. St. Lousi: Mosby Year Book; 1992p.3-15. [2] Melendez d, Leblane M.Survey of arm amputees not wearing prostheses: implication for research and service. J assoc Child Proshthet Orthot Clan 1988; 23; 62-9. [3] Leblanc M.Use of prosthetic prehensors. Orostget orthotic int 1988:12; 152-4. [4] Leblanc M Becgtol CO. Endoskeletal upper extremity prosthesis. University of califonia at Los Angeles Prosthetics- Orthotics Progream Feasibility Study; 1968 [5] Donovan WH. The next generstion myoelectric prosthesis. Houston TX The institute For Rehabilitation and Research; 1994. [6] Gwynne G. Mechanical component. In santschoi WR, editor, Manual of upper extremity prosthetic los Angeles; University of California at Los Angeles; 1958. P. 33-68 [7] Leblanc M, yeh C, Doshi R. Development of an endoskeletal hand with skin and no glove proceeding of the 23rd annual AAOP meeting &Scientific Symposium 1997Mar 12-15 San Francisco; 1997. [8] Fryer CM, Michael J. Upper Limb prosthetic; boby- powered componenet. In: Bowker JH, Michael JE, editors. Atlas of limb prosthetic: surgical, prosthetic, and rehanbilitation principle.ST Louis: Mosby year Book; 1992.p. 107-31.
Copyright
Copyright © 2022 Desai Akash Chandrakant, Shaikh Sohil Jahangir, Sharma Abhishek Rajendra, Shaikh Tousik Rafik, Iqbal Mansuri . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40870
Publish Date : 2022-03-19
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online