

Ijraset Journal For Research in Applied Science and Engineering Technology
Mamdani and Sugeno Fuzzy Logic Approach of PID Controller
Authors: Aaisha Rehman, Abhijeet Kumar Singh, Ayushi Singh, Er. Pratibha Dubey
DOI Link: https://doi.org/10.22214/ijraset.2022.43542
Certificate: View Certificate
Abstract
The design of a PID-type (Proportional-Integral-Derivative) controller based on a Fuzzy algorithm for deployment in a transportation cruising system is described in this work. To avoid collisions, a cruising system based on the Fuzzy rules has been developed. On the road, there are crashes between vehicles. Fuzzy Logic is a new type of logic which serves as a point of reference for driving the vehicle. It either increases or reduces the speed depending upon the speed of front, rear and ego vehicle. The speed of control is determined by the preceding vehicle\'s distance when it becomes too close and alerts the driver when required. There are two theories on fuzzy logic the first given by Mamdani and the other was given by Sugeno.
Introduction
I. INTRODUCTION
A. Mamdani VS Sugeno
- Mamdani Approach: The Mamdani Fuzzy Inference Theory is a theory of fuzzy logic developed by Ebhasim Mamdani. It was first created to operate a steam engine and boiler combination using a set of linguistic control rules gathered from skilled human operators. The result of each rule in the Mamdani inference system is a fuzzy logic set. Mamdani FIS possess less flexibility in the system design. Through defuzzification of rules resultant of crisp result is obtained. Mamdani systems are well-suited to expert system applications where the rules are created from human expert knowledge, such as medical diagnostics, because their rule bases are more intuitive and easier to grasp.
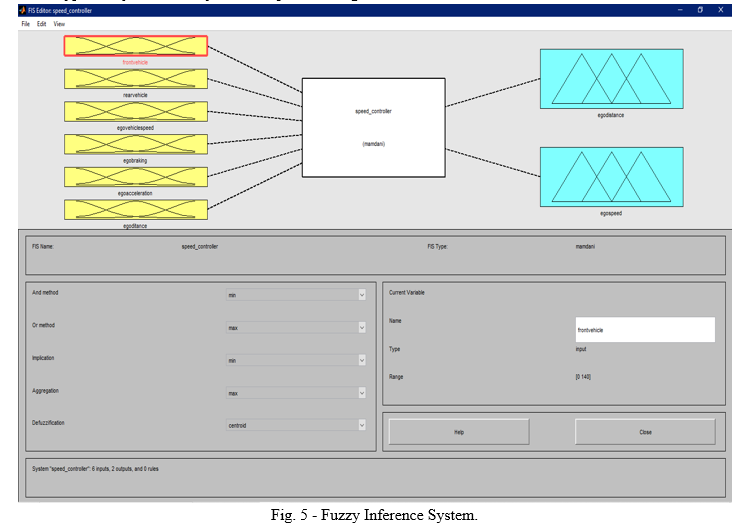
The inference method of a Mamdani system is defined in Fuzzy Inference Process and precised in the following figure –
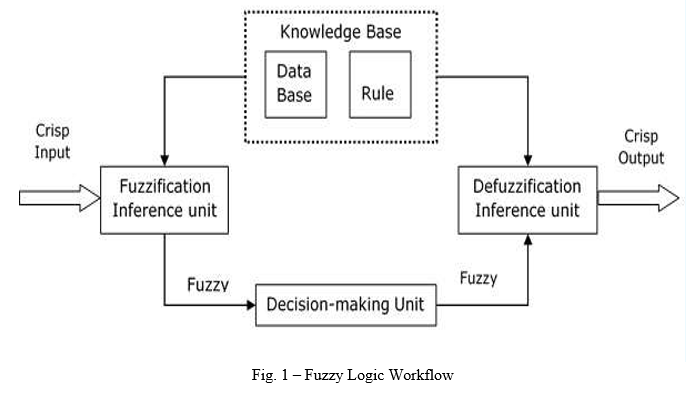
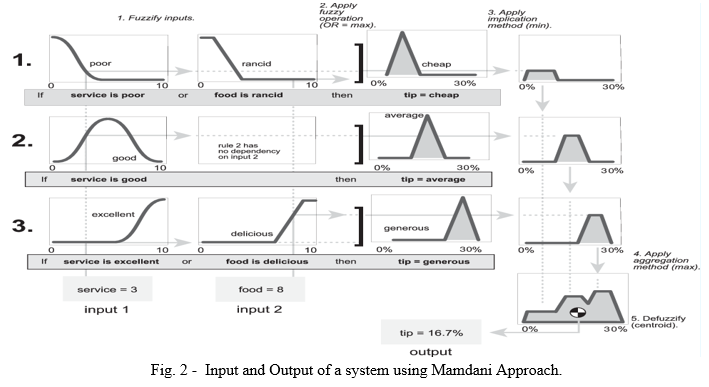
Each rule's output is a fuzzy set produced from the FIS's output membership function and implication technique. Using the FIS's aggregation mechanism, these output fuzzy sets are grouped into a single fuzzy set. The combined output fuzzy set is then defuzzified using one of the methods outlined in Defuzzification Methods to compute a final crisp output value.
2. Sugeno Approach: Sugeno fuzzy inference, also known as Takagi-Sugeno-Kang fuzzy inference, is a type of fuzzy inference that utilises singleton output membership functions that are either constant or a linear function of the input values. Sugeno defuzzification is more computationally efficient than Mamdani defuzzification because it employs a weighted average or weighted sum of a few data points instead of computing a centroid of a two-dimensional area.
The Sugeno approach was for generating fuzzy rules from a given input-output. A typical fuzzy rule in a first-order Sugeno model has the form:
IF s is A and t is B THEN r = f(s, t).
It is bit complex to understand because it gives the output in the form of function but Sugeno approach has more flexibility in the system design. Higher-order Sugeno fuzzy models are also possible, but while planning, those host significant complication. In this no defuzzification of fuzzy rules is done. Using weighted average of the rules of resultant, crisp result is obtained.
The resulting Sugeno system has constant output membership functions that correspond to the centroids of the Mamdani output membership functions.
Each rule in a Sugeno system operates as shown in the following diagram, which shows a two-input system with input values x and y.
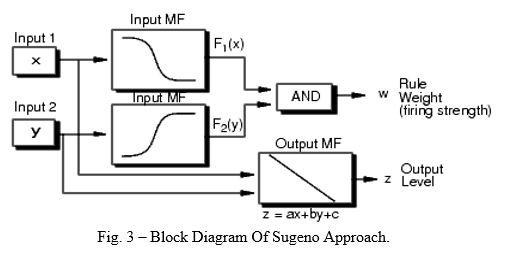
Each rule generates two values:
- zi — Rule output level, which is either a constant value or a linear function of the input values:
zi=aix+biy+ci
Here, x and y are the values of input 1 and input 2, respectively, and ai, bi, and ci are constant coefficients. For a zero-order Sugeno system, zi is a constant (a = b = 0).
- wi — Rule firing strength derived from the rule antecedent
wi=AndMethod(F1(x),F2(y))
Here, F1(...) and F2(...) are the membership functions for inputs 1 and 2, respectively.
Consider each rule as determining the location of a moving singleton when considering first-order Sugeno systems (a and b are nonzero). That is, depending on the input values, the singleton output spikes can move around in a linear fashion within the output space. The magnitude of the singleton spike is then determined by the rule firing strength.
The system's ultimate output is a weighted average of all rule outputs:
Final Output = N∑i=1wizi / N∑i=1wi
Where N is the number of rules.
The following figure shows the fuzzy inference process for a Sugeno system.
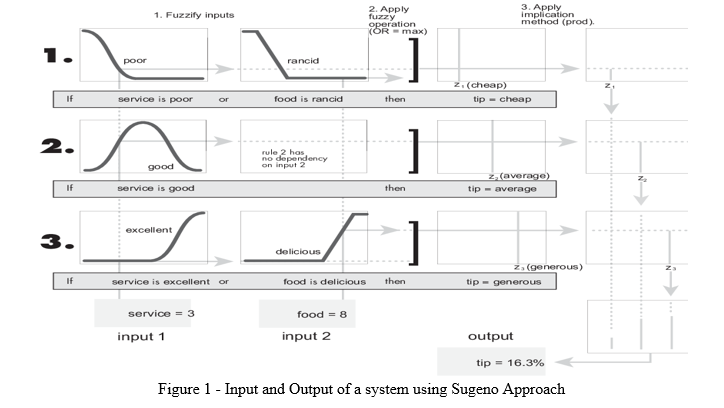
The Sugeno technique is appropriate for acting as an interpolating supervisor of numerous linear controllers that are to be applied, respectively, to distinct operating states of a dynamic nonlinear system because each rule is linearly dependent on the input variables. The performance of an aeroplane, for example, might vary considerably depending on altitude and Mach number. Although linear controllers are simple to programme and adapt to any flight circumstance, they must be updated frequently and seamlessly to keep up with the flight vehicle's changing state. Sugeno fuzzy inference systems are well-suited to the task of smoothly interpolating linear gains over input space; they are a natural and efficient gain scheduler. A Sugeno system, on the other hand, is well suited for modelling nonlinear systems by interpolating between multiple linear models.
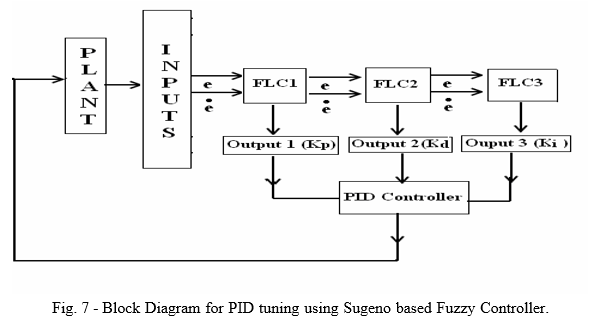
II. PID CONTROLLER USING MAMDANI FUZZY INFERENCE SYSTEM
The non-linearity characteristic behaviour of fuzzy systems is universally known. As a result, the non-linear characteristic of a traditional PID controller can be improved. The fuzzy logic algorithm considerably improved the situation. Furthermore, The Fuzzy PID controller has been the subject of research, concentrating on the typically two-input PIDs. According to Mamdani there are two types two input PID- PI (Proportional-Integral) and PD (Proportional-Derivative). This is due to the fact that the three inputsPID controllers are a difficult undertaking to implement since there are so many parameters to be taken into account when constructing the fuzzy rule foundation.
The control principles for the Integral mode are difficult to identify.As a result, the controller's three inputs are all defined as error (e), change in error (Derivative), and rate of change of error (as acceleration error).
Aside from that, there has never been a proper tuning method accessible. Tuning by trial and error method is used in order to optimise the controller.
In addition, the number of rule bases grows at an exponential rate with the addition of the membership functions.
Suppose if the number of input is m and the number of membership functions for each input is n then the total count of IF-Else rules sums to mn.
The transportation cruising system is the intended application of the Fuzzy based PID controller in this study. The proposed cruising mechanism is designed to avoid collisions between vehicles. Thesystem detects the distance of the preceding vehicle and slows down if it gets too close or, if necessary, notifies the driver. Furthermore, it restricts the acceleration of the vehicle as a function of distance car that came before it.
The fuzzy based PID cruising controller developed in this study is less expensive and may be used in low-cost cars. This would help to decrease future traffic accidents and protect the safety of road users.
The PID-type Fuzzy Controller's output serves as a reference for a car's speed, allowing it to rise or decrease. If the set-point is 20 units of distance, for example, the car will slow down if the preceding vehicle's distance is less than 20 units of distance. If the distance is greater than 20 units, the vehicle is permitted to accelerate.
The rate of acceleration and deceleration, on the other hand, is determined by the vehicle's distance. The rate of deceleration and the amount of acceleration that can be done is determined by the vehicle's distance from each other. When the two automobiles are too close together that is the distance between them is less than 10 units, the controller will use a medium force to deaccelerate the vehicle and at the same time, warn and alert the driver to use the brakes.
Instead of slamming the brakes on the car this is done to safeguard the safety of the passengers as due to the unexpected momentum, the passenger may be injured.
Improvements to the PID controller system can have a significant impact on the industrial control process. As a result, in this project, the PID-type Fuzzy controller system is explored, designed.
III. PID CONTROLLER USING SUGENO FUZZY INFERENCE SYSTEM
FLC attempts to think like a human and processes natural language. One of the most appealing control strategies is FLC, it makes use of the process's qualitative information to create a controller. Systems that are complex and ill-defined and lack accurate mathematical models, as well as systems that are uncertain, higher-order systems, as well as time-delay systems, can be regulated using FLCs.
Zadeh (1973) proposed a paradigm for dealing with these systems, in which the fuzzy control approach was specified using IF-THEN expressions. Since the beginning of fuzzy control, two types of language descriptions of fuzzy controllers have been developed: the Mamdani type (Mamdani 1974) and the Takagi–Sugeno (TS) type (Takagi and Sugeno 1985).
The ability to analyse, create, and implement fuzzy logic controllers requires a strong understanding of mathematical models. Membership functions, triangle norms, triangular co-norms, rule base, and defuzzification approach are all aspects that influence mathematical models. Different combinations of these parameters result in different models, indicating that there is no single fixed model for fuzzy controllers. The mathematical model aids in the establishment of stability conditions for feedback systems with fuzzy controller models in the loop, the determination of optimal controller parameter values, and the investigation of the controller's computational and memory requirements.
Conclusion
On a concluding note, let us look at the differences between the Mamdani System and the Sugeno Model that we have observed throughout the paper. 1) Output Membership Function: The output membership function is the fundamental distinction between them. The membership functions of Sugeno\'s output are either linear or constant. 2) Aggregation and Defuzzification Procedures: The difference between them is due to the outcome of fuzzy rules, and their aggregation and defuzzification procedures differ as a result. 3) Mathematical Rules: The Sugeno model has more mathematical rules than the Mamdani model 4) Adjustable Parameters: The Sugeno controller has more parameters that can be changed than the Mamdani controller
References
[1] Visioli, Antonio. \"Tuning of PID controllers with fuzzy logic.\" IEE Proceedings-Control Theory and Applications 148.1 (2001): 1-8. [2] Young Ho Kim and Frank L. Lewis, \"Reinforcement Adaptive Learning Neural-Net-Based Friction Compensation for High Speed and Precision\", IEEE Transc. On Control Systems Techn, vol. 8, no. 1, pp. 118-126, January 2000. [3] Yesil, Engin, M. Guzelkaya, and Ibrahim Eksin. \"Fuzzy PID controllers: An overview.\" The Third Triennial ETAI International Conference on Applied Automatic Systems, Skopje, Macedonia. ETAI Society of Macedonia, 2003. [4] Natsheh, Essam, and Khalid A. Buragga. \"Comparison between conventional and fuzzy logic PID controllers for controlling DC motors.\" International Journal of Computer Science Issues (IJCSI) 7.5 (2010): 128. [5] Gaurav, Amrit Kaur, and A. Kaur. \"Comparison between conventional PID and fuzzy logic controller for liquid flow control: Performance evaluation of fuzzy logic and PID controller by using MATLAB/Simulink.\" International Journal of Innovative Technology and Exploring Engineering (IJITEE) 1.1 (2012): 84-88. [6] Ying, Hao. \"Theory and application of a novel fuzzy PID controller using a simplified Takagi–Sugeno rule scheme.\" Information Sciences 123.3-4 (2000): 281-293. [7] Ding, Yongsheng, Hao Ying, and Shihuang Shao. \"Typical Takagi–Sugeno PI and PD fuzzy controllers: analytical structures and stability analysis.\" Information Sciences 151 (2003): 245-262. [8] Min, Chan-oh, Dae-woo Lee, Kyeum-rae Cho, Sung-jin Jo, Jang-sik Yang, and Won-boo Lee. \"Control of approach and landing phase for reentry vehicle using fuzzy logic.\" Aerospace science and technology 15, no. 4 (2011): 269-282. [9] Guney, Kerim, and Nurcan Sarikaya. \"Comparison of Mamdani and Sugeno fuzzy inference system models for resonant frequency calculation of rectangular microstrip antennas.\" Progress In Electromagnetics Research B 12 (2009): 81-104. [10] Rajurkar, Shreedharkumar, and Nishchal Kumar Verma. \"Developing deep fuzzy network with Takagi Sugeno fuzzy inference system.\" 2017 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). IEEE, 2017. [11] Mehran, Kamyar. \"Takagi-sugeno fuzzy modeling for process control.\" Industrial Automation, Robotics and Artificial Intelligence (EEE8005) 262 (2008): 1-31. [12] Bergsten, Pontus, Rainer Palm, and Dimiter Driankov. \"Observers for Takagi-Sugeno fuzzy systems.\" IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics) 32.1 (2002): 114-121.
Copyright
Copyright © 2022 Aaisha Rehman, Abhijeet Kumar Singh, Ayushi Singh, Er. Pratibha Dubey. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43542
Publish Date : 2022-05-29
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online