

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Manufacturing of Non- Contact Type Trolley using IOT
Authors: Pankaj R. Beldar, Mugdha Bhadak, Neha Dixit, Milind Bahiram
DOI Link: https://doi.org/10.22214/ijraset.2022.40468
Certificate: View Certificate
Abstract
Automation is a need of time. Automation makes task easier and reliable. Robot is a reprogrammable, multifunctional gadget which is basically intended to work like human being.The Internet of Things (IoT) and robotics communities have so far been driven by different yet highly complementary objectives, the first focused on supporting information services for pervasive sensing, tracking and monitoring; the latter on producing action, interaction and autonomous behaviour. In this paper, we will mainly focus on the issues of patients as well as safety and security, specifically the effect of medical device regulation and data protection laws on robots in healthcare. First, we will examine the demand for robots in healthcare and assess the benefits that robots can provide. Second, we will look at the types of robots currently being used in healthcare, anticipate future innovation, and identify the key characteristics of these robots that will present regulatory issues. To overcome the issues like direct contact with patients in Covid-19 wards, we will develop a robot i.e., corona warrior robot which will be used to provide medicines to patients and sanitize the person when any person comes in front of the robot
Introduction
I. INTRODUCTION
Technology has become a crucial part of human life. Human beings depend on different technologies for their day to day activities. Automation is basically the delegation of the human work to the automated equipment's. Industry 4.0 demands high degree of automation. The main objective of implementing the technology is to increase the quality of human life and decrease the physical as well as mental strain. An interdisciplinary approach of dealing with the mechanical applications with proactive use of mechanical mechanisms, electronics engineering and computer science algorithms has been used in this project. A robot is an electromechanical machine that is controlled by computer program to perform various operations. Industrial robots have designed to reduce human effort and time to improve productivity and to reduce manufacturing cost. Today human-machine interaction is moving away from mouse and pen and becoming much more pervasive and much more compatible with the physical world. Android app can control the robot motion from a long distance using Wifi communication to interface controller and android. The main purpose of this project is to develop a remote user interface to control a Robot via a wireless technology. There is a need to communicate with the robot remotely in order to control the robot movements and pass critical data both ways. Wireless tracking of human body parameters has attracted significant interest in recent years due to its wide ranging applications such as rehabilitation, virtual reality, sports science, medical science, surveillance, in recent times, wireless sensors and sensor networks have become a great interest to research, scientific and technological community. This robot is used to provide medicines and sprinkle sanitizer when person is come in front of robot by using ultrasonic sensor. Camera is providing on robot to monitor all the movements of robot. We can monitor tand operate the robot by using android app. Artificial intelligence technique is used in this system. Proximity sensor is used to sensor the obstacle and stop robot automatically.
II. SOFTWARE REQUIREMENT
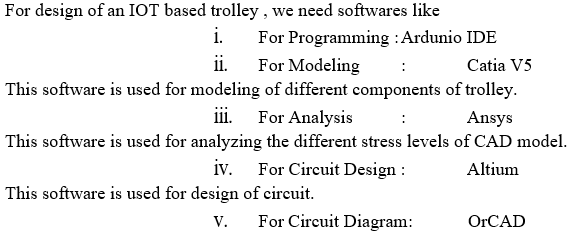
This software is used for drawing block diagram of circuit.
Use of above mentioned software for Dimensional accuracy, Mechanical stability, Simulation of trolley manufacturing purposes. The trolley controlled by a microcontroller module unit. It can stop, turn right, turn left, forward and backward. It can follow wherever they go, during they were in range. The designed robot can be easily controlled by sending the commands to the micro controller from anywhere from the world. These commands can be observed by using Attention commands and acceptable action is taken. To overcome the issues like direct contact with patients in Covid-19 wards, we will develop a robot i.e., corona warrior robot which will be used to provide medicines to patients and sanitize the person when any person comes in front of the robot.
III. DESIGN
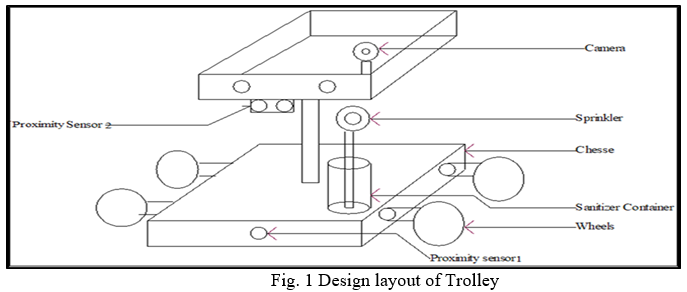
Firstly, we develop the Chassis in rectangle shape using the MS material. Thickness of material is 1 mm. As shown in the figure, it is clearly indicated the wheel position of shaft, the sensor position as well as the tray we providing. The tray placed on the top of the Robot will be used for putting the food, medicine and drinking water in it. The shape of tray is also rectangle. We will provide a stand using the square pipe which also supports to the tray. The material of pipe is also MS. For motor wheel, diameter of the wheel is 10 centimeter and the material of wheel is PVC and Outer body’s material is rubber for gripping the surface. We use a 10 kg torque motor for or carrying the heavy load. The Motor RPM is 60 revolutions per minute and it requires 200 mA current and it operates on 12 volt DC voltage. Also we developed stand for camera. The camera is an IP camera. It will be operated on internet protocol and camera also has unique IP address. Output of the camera will be shown on Android mobile as well as laptop. For circuitry, the place of Chassis basically be on bottom side also we provide two eyes to the robot with the help of LED. Fig. 1 shows the layout of trolley.
A. Concept Generation
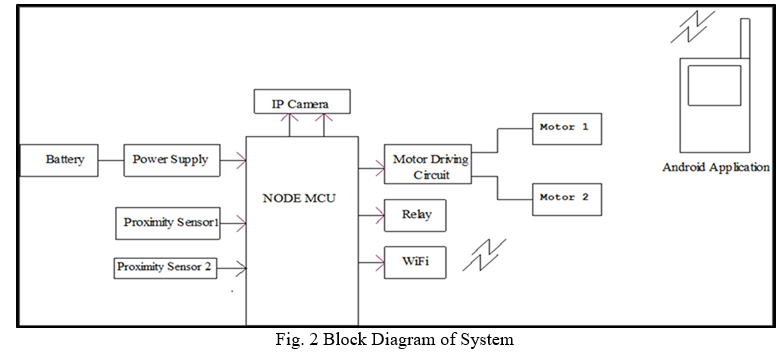
Fig. 2 shows the block diagram of the system. In this project we will provide power supply using 12 Volt battery 1.4 Amp. Output of the battery is connected to power supply block. In this power supply block, we will generate two different voltages one is a 12 volt for DC motor and one is a 5 volt for sensors and NODE MCU microcontroller. For detecting the obstacle we are using proximity sensor. Output of proximity sensor is connected to the NODE MCU. NODE MCU will continuously monitor the output of proximity sensor. If the obstacle is detected at that time output Voltage is 5 Volt and 5 Volt is received by the NODE MCU microcontroller. Output of the NODE MCU microcontroller is connected to the L298 motor driver IC module. After receiving 5V at the input of the motor driver IC, Robot will automatically stop. To control the system using Internet, we are going to develop an Android application. This application receives command from the Wi-Fi module. NODE MCU has in-built Wi-Fi module which will receive the command from the application over the internet so that's why this project is called as an IoT based project. The one additional features of second proximity sensor is sanitizing the person when the output of proximity sensor goes to high then immediately sanitizer motor will turn ON because output of sensor is directly connected to the 5 volt relay.
B. Power Supply Design
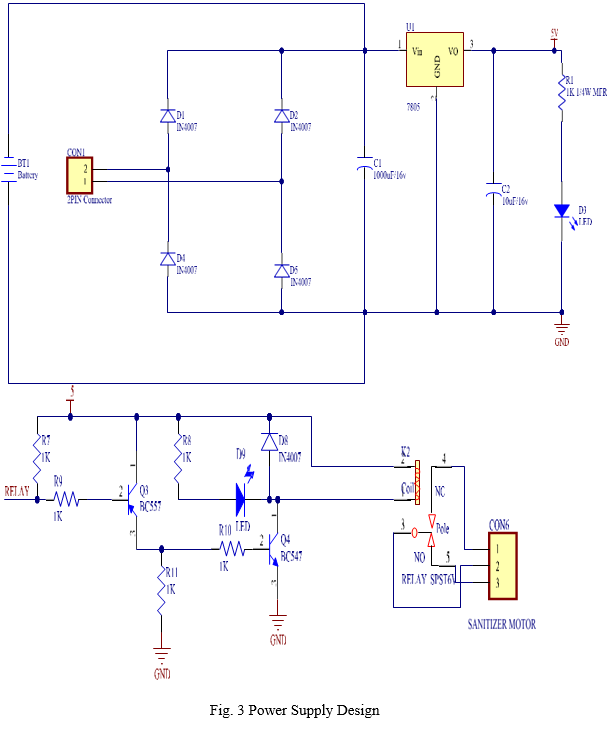
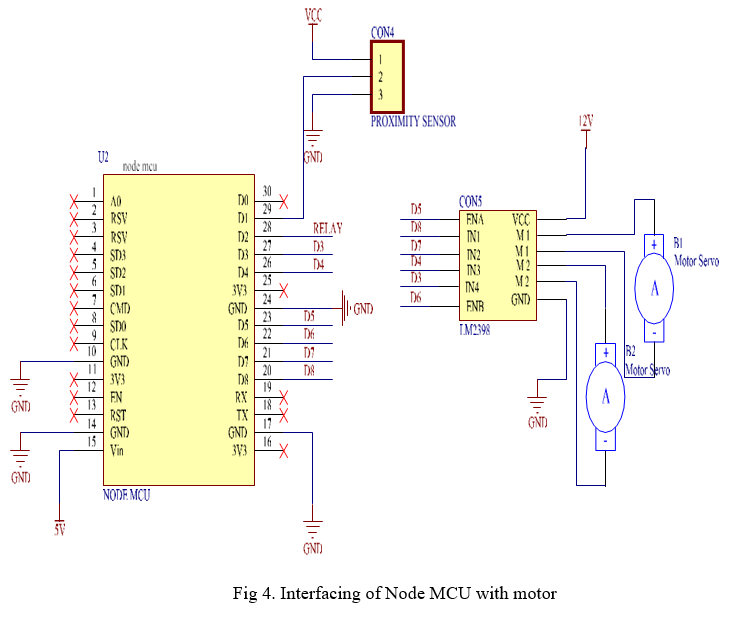
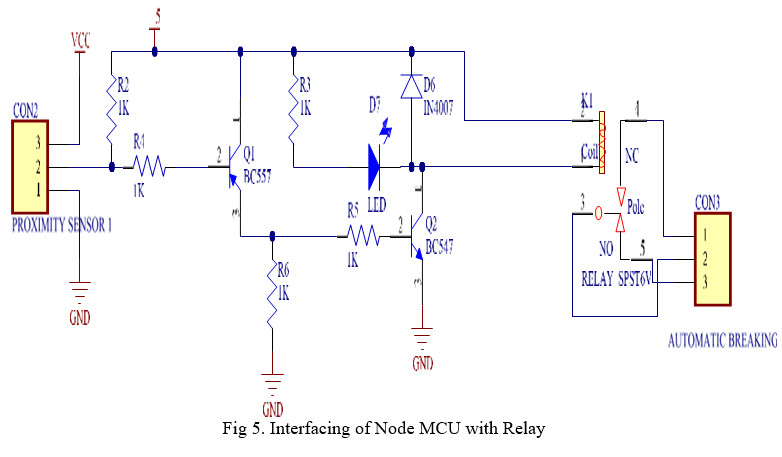
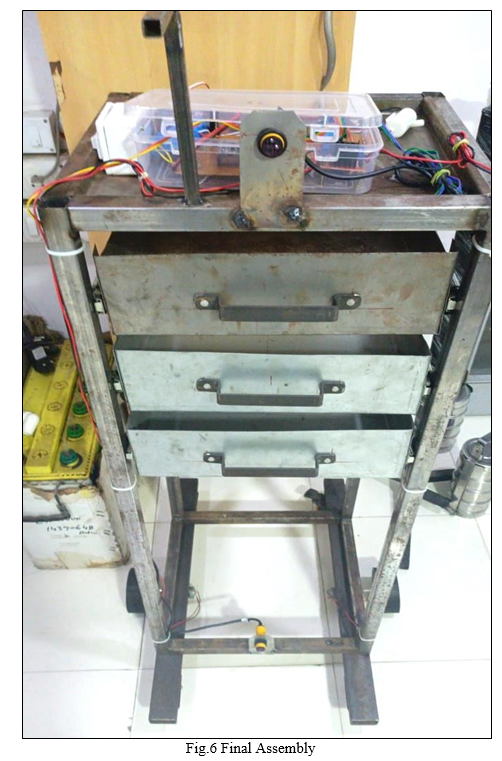
Fig.4 shows the interfacing of node MCU with motor and fig. 5 shows the interfacing of node MCU with relay. In final assembly all connections as shown in image .It includes two proximity sensor one for obstacle and second for automatic sanitization .The electronic circuit connections and mechanical parts are also shown in image .The breaking wheels ,trolleys ,and all mechanical part is merge with electronic circuit which includes Node MCU microcontroller ,relay ,battery ,power supply, motor.
C. Testing
Testing is nothing but the physical checking of the all components and all possible condition to avoid problem in the circuit functioning. Testing is done with so many checking instruments as per the circuit requirement and conditions.
D. Trouble Shooting
After the PCB is prepared the conductivity test is carried out. First pin- to-pin conductivity is checked. The necessary IC interconnections are also checked. The resistance value of all the resistor are checked and then completed with the value denoted by color-coding is done. The capacitors are also checked to see whether they are working or short or open. The diodes are tossed for priority. The diodes are cracked for their forward resistance and reverse resistance. After carrying out all the possible testing, the jumper wires are also tested for conductivity.
IV. RESULTS
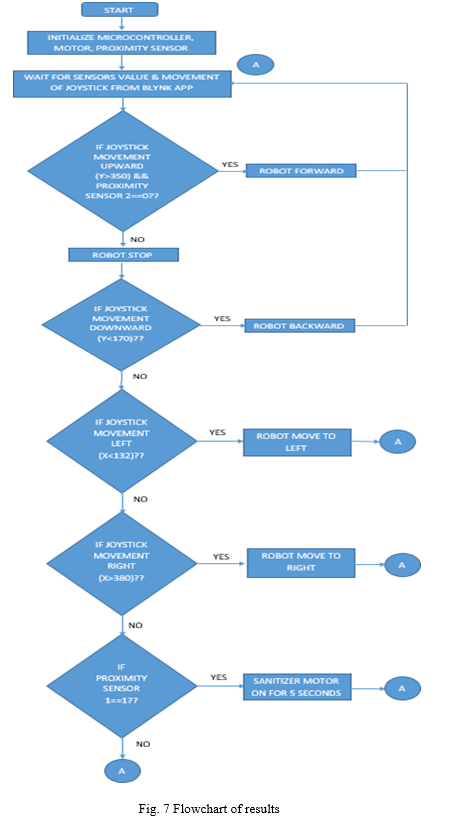
We can check the results in the form of movement of joystick from the blink App used for IOT. Fig. 7 shows the results in the form of the flowchart.
V. ACKNOWLEDGMENT
I am thankful to Miss. Rutuja Bhaskar, Miss. Snehal Suryawanshi, Miss. Prajakta sonawane, Miss. Meshram Rashami. They have helped me for design and Manufacturing of the trolley.
Conclusion
We have designed and fabricated a robotic trolley for carrying and providing essentials in hospitals. With the help this trolley one can operate from one place to another or from one user to another. This is done with the help of a sensor and a motor. We have carried much confidence in doing this project successfully. We have learn about analysis of a problem, how to solve it, design of the trolley, design of parts, fabrication of parts, material purchase, assembling of parts and successful testing robotic trolley.
References
[1] Wolfgang Gruber, Wolfgang Bäck and Wolfgang Amrhein, Design and Implementation of a Wheel Hub Motor for an Electric Scooter, 978-1-61284-247-9/11/$26.00 ©2011 IEEE [2] João Diogo da Cal Ramos, Front and Rear Swing Arm Design of an Electric Racing,Instituto Superior Técnico, Universidade de Lisboa, Portugal November 2016 [3] Wojciech Pawlak, Kacper Leszczy?ski, mechanical design and fem analysis of electric motorcycle’s swing arm, on 25 June 2019.
Copyright
Copyright © 2022 Pankaj R. Beldar, Mugdha Bhadak, Neha Dixit, Milind Bahiram. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40468
Publish Date : 2022-02-23
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online