

Ijraset Journal For Research in Applied Science and Engineering Technology
Mecanum Wheel: An Emerging Trend for Land-based Vehicle
Authors: Mrs. V. S. Gaikwad, Gagan Pawar, Omkar Kudale, Yathathar Jadhav, Aman Khandale, Prajakta More
DOI Link: https://doi.org/10.22214/ijraset.2022.43432
Certificate: View Certificate
Abstract
Rover is an unmanned vehicle which travels and collect data in difficult-to-reach places where a human being cannot work. The Proposed framework of this project is to use a rover as a platform for sensing devices and application-specific devices and to overcome the issue of humans, rescue and research team and their delays through innovation.
Introduction
I. INTRODUCTION
Rover is an unmanned vehicle that travels and collects data in remote locations where humans are unable to work. The project's proposed framework is to employ a rover as a platform for sensing devices and applicationspecific devices, and to leverage innovation to solve the problem of humans, rescue, and research team delays.
The Mecanum wheel, which allows the rover to travel in any direction, is the main component of the rover. A vehicle can be moved in any direction by combining individual wheel rotations on Mecanum wheels. The mecanum wheel, however, is prone to vertical and horizontal movements due to the rollers' sequential contact with the ground. A robotic arm with four degrees of freedom has been constructed (DOF). It is controlled by an Arduino Mega 2560 R3 microprocessor, which collects input signals from the user via potentiometers. The arm is made up of four rotating joints and an end effector, with the rotary motion provided by a servomotor. The Arduino has been programmed to rotate each servo motor in accordance to the rotation of the potentiometer shaft. The major purpose of the Mecanum wheel-based Rover is to offer cost-effective, efficient, rapid, and safe information to research or rescue teams.
II. CIRCUIT DIAGRAM
This project's circuit schematic is shown below.
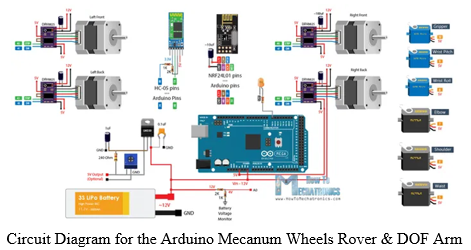
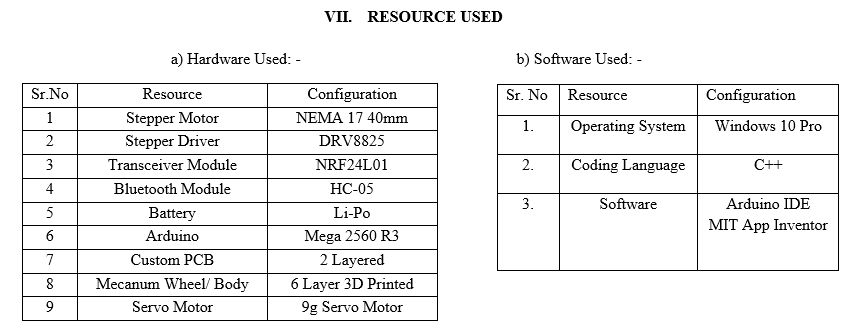
Four NEMA 17 stepper motors are controlled by four DRV8825 stepper drivers, alternatively the A4988 stepper drivers could be used instead. We have used a 12V power supply to power the steppers and the entire rover, and I have used a 3S Li-Po battery that gives roughly 12V. The NRF24L01 module is used for radio communication, and the HC-05 Bluetooth module is used for Bluetooth connection. A simple voltage divider is used to monitor the battery voltage, as well as an LED connection to indicate when the battery voltage varies below 11V. A robotic arm has been constructed which is four degrees of freedom (DOF). It is controlled by an Arduino Mega 2560 R3 microcontroller, which uses a set of potentiometers to collect input signals from the user. The arm consists of four rotating joints and an end effector, with a servomotor providing rotary motion. The Arduino has been programmed to supply rotation to each servo motor in proportion to the potentiometer shaft's rotation.
We also included a 5V voltage regulator capable of delivering roughly 3A of current.
III. PROPOSED METHODOLOGY
The Proposed framework is to use a rover as a platform for sensing devices and application-specific devices in Forklift, Electric Cars, Factor Robots, Amazon Delivery Robots.
The main goal is to provide the concerned authorities with a guide to aid them in analyzing information via research using the rover and developing a rescue strategy that is cost effective, efficient, quick, and safe for the search and rescue team.
IV. MECANUM WHEELS
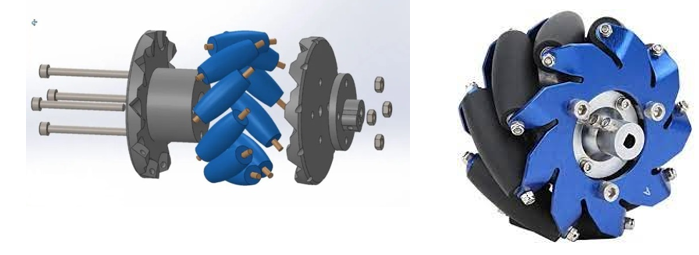
A. What is Mecanum Wheels?
A Mecanum wheel is a wheel with rollers attached to its circumference. Each roller rotates about an axis that forms an angle of 45 degrees with the plane of the disk. Such a design provides additional kinematic advantages for the Mecanum wheels in comparison with the conventional wheels.
Bengt Erland Ilon (1923-2008), who invented the concept of mecanum wheels
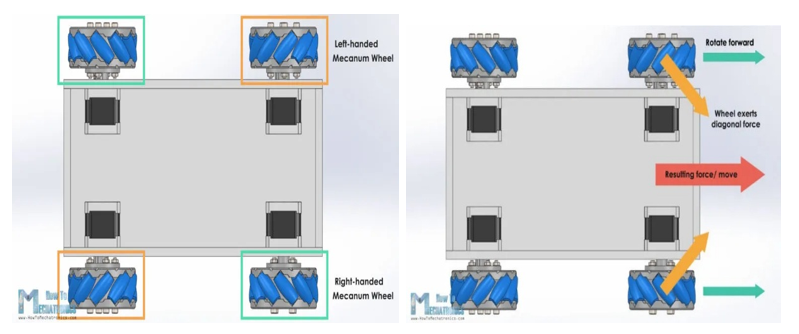
B. Working
A Mecanum wheel is one that has rollers around the circumference. These rollers are placed diagonally or at a 45-degree angle to the wheel's axis of rotation. When travelling forward or backward, the wheel exerts force in a diagonal direction. As a result, we may use these diagonal forces by rotating the wheels in a specific sequence, allowing the robot to travel in any direction.
It's also worth mentioning that there are two varieties of Mecanum wheels: left-handed and right-handed Mecanum wheels. The only variation is the direction of the rollers, which must be inserted in certain areas in the robot. The top roller of each wheel's rotation axis should point to the robot's centre.
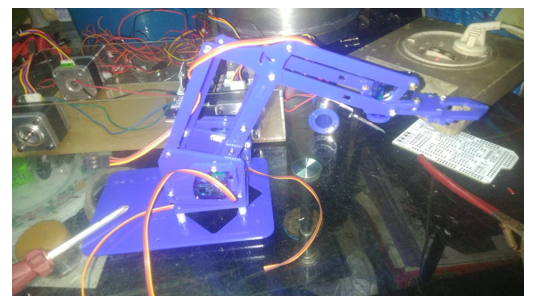
C. DOF Arm
The 4-DOF robot arm has four joints to imitate a human upper arm namely joint 1, 2, 3 and 4 that rotate around x, y, and z axes, respectively. The joints move four arm links to get the required posture of the wrist that will be assembled with the hand in future application. The investigation of the components and mechanism was implemented to make sure that they matched in terms of the dimensions and capability to lift the load. 9G Servo motor with the calculated torque has been selected as the actuators of the four joints. Overall, the constructed robot arm proved that the proposed design is able to achieve the design requirements and practically moved in several postures in real time.
V. PROBLEM STATEMENT
The main reason for the construction of Rover, an unmanned vehicle that travels in hard-to-reach locations where a human cannot work. We also used Mecanum wheels, which can move in any direction, including horizontal, forward, backward etc.
A (DOF) arm is used to pick and place or collect data, allowing humans to save the maximum time.
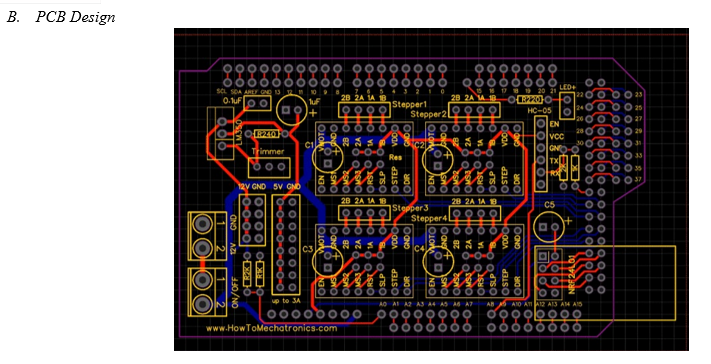
VI. PCB DESIGN & ARDUINO
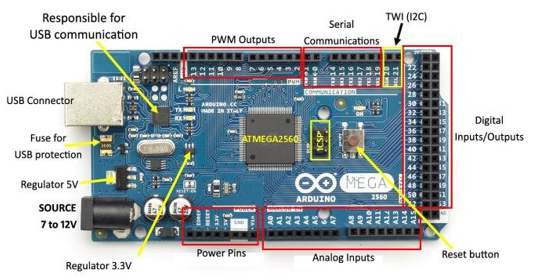
A. Arduino
The ATmega2560 is the basis for the Arduino Mega 2560 microcontroller board. It contains 54 digital input/output pins, 16 analogue inputs, 4 UARTs (hardware serial ports), a 16 MHz crystal oscillator, a USB connection, a power connector, an ICSP header, and a reset button.
It comes with everything you'll need to get started with the microcontroller; simply plug it into a computer with a USB connection or power it with an AC-to-DC converter or battery. Most shields created for the Uno and previous boards Accordance with part or Mini computers are compatible with the Mega 2560 board.
VIII. FEATURES:
“AI Based Rover using Arduino” have following features:
- Step-by-Step directions.
- Users and devices are unlimited.
- Planning / Saving Current routes
- Mobile app can be used for Controlling otherwise RC controller can be used
- Data gathering highly hindered by short operating time.
IX. FUTURE SCOPE
The topic of electronics and robotics provides a wide range of chances for furthering present research. A wide range of sensors and equipment, like as thermal cameras, heat sensors, and pressure sensors, are available on the market and may be put on the platform to help improve the rover's existing capabilities. It can be used in factories for forklifts, in electric cars ambulance and in such conditions where a human being cannot work.
Conclusion
The major goal is to offer the concerned authorities with a tool to assist them in gathering data through observation utilizing the rover and developing a rescue strategy that is cost effective, efficient, rapid, and safe for the rescue crew.
References
[1] S. Waldherr, R. Romero, and S. Thrun, “A gesture based interface for human-robot interaction”, in Autonomous Robots, vol. 9,no.2, pp.151-173, 2000. [2] M. Popa, “Hand gesture recognition based on accelerometer sensors”, in Networked Computing and Advanced Information Management (NCM),pp.-115-twelve0, 2011. [3] P. Colla, J. Ducloux,P. Petrashin,W. Lancioni,L. Toledo, “Accelerometer-based hand gesture recognition system for interaction in digital TV”, in Instrumentation and Measurement Technology Conference (I2MTC) Proceedings,pp.-1537-1542, 2014 [4] K. E. Clothier and Y. Shang, “A Geometric Approach for Robotic Arm Kinematics with Hardware Design, Electrical Design, and Implementation,” J. Robot., 2010. [5] Mr. John J. Craig, “Introduction to Robotics: Mechanics and Control” [6] Yunan Zhang, Tao Huang. ‘”Research on a Tracked Omnidirectional and Cross-Country Vehicle”. Mechanism and Machine Theory 87 (2015) 18-44. [7] [Killough, S.M., and Pin, F.G., 1994], “A New Family of Omnidirectional and Holonomic wheeled platforms for mobile robots”, IEEE Transactions on Robotics and Automation, Vol.10, No.4, pp. 480-489 [8] “Design and Control of an Omni-directional Mobile Robot”, Ioan Doroftei, Victor Grosu & Veaceslav Spinu
Copyright
Copyright © 2022 Mrs. V. S. Gaikwad, Gagan Pawar, Omkar Kudale, Yathathar Jadhav, Aman Khandale, Prajakta More. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43432
Publish Date : 2022-05-27
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online