

Ijraset Journal For Research in Applied Science and Engineering Technology
MEMS Accelerometer Based Hand Gesture-Controlled Robot
Authors: Aditi Deo, Aishwarya Wankhede, Rutuja Asawa, Supriya Lohar
DOI Link: https://doi.org/10.22214/ijraset.2022.46158
Certificate: View Certificate
Abstract
Gesture detection has gotten a lot of attention from a lot of different research communities, including human-computer interaction and image processing. User interface technology has become increasingly significant as the number of human-machine interactions in our daily lives has increased. Gestures as intuitive expressions will substantially simplify the interaction process and allow humans to command computers and machines more intuitively. Robots can now be controlled by a remote control, a mobile phone, or a direct wired connection. When considering cost and required hardware, all of this adds to the complexity, particularly for low-level applications. MEMS accelerometer-based gesture-controlled robot attempts to create a gesture-controlled robot that can be commanded wirelessly. User is able to control motions of the robot by wearing the controller glove and performing predefined gestures.
Introduction
I. INTRODUCTION (11PT)
A huge portion of the world's population is unable to communicate verbally, putting them in a tough predicament when attempting to communicate with others.
In recent years, hand gesture-controlled systems have become one of the most anticipated fields of research. Its broad range of potential applications makes it a valuable feature in a variety of sectors, including robotics, surgery, and more recently, the Covid-19 epidemic. It also has the potential to be used to develop contactless therapies and testing. It is capable of obtaining precision that a human hand is incapable of. In the realm of human-computer interaction, hand gesture recognition is one of the newest technologies. Controlling the robot via a remote or a switch, on the other hand, is quite difficult. As a result, a new project, an accelerometer-based hand gesture control robot, is being developed. The main purpose of this project is to use an accelerometer to control the robot's movement with hand gestures. Typically, a robot is an electromechanical machine that can execute tasks on its own. Some robots need to be guided in some way, which can be done via a remote control or a computer interface Robots can be self-contained, semi-autonomous, or controlled remotely. Robots have progressed so far and are now capable of imitating humans that they appear to have their own minds.
This project is primarily focused on the following application areas:
- Automated devices
- Making life easier for the disabled
- Use in the medical field
- For defenses purposes, and so forth.
The project's goal is to create a human-machine interface for controlling robots. In our project, we will create a wearable hand glove with sensors that will capture the movement of the hand and convert the raw mechanical data into electrical data. This information will be further processed and transformed into a format that the accelerometer on the glove can interpret. This accelerometer will serve as a data transmitter for wireless communication.
The data will be processed and transferred to the Microcontroller once it is received by the receiver module, which will be connected to the Microcontroller. Microcontroller will deduce the commands and accordingly it will actuate the motor drivers to control the Motors for various tasks on the robot.
II. OBJECTIVES
- To make this gadget simple and inexpensive to manufacture and utilise for a variety of purposes.
- The goal of this project is to create a car that can be controlled wirelessly by gestures.
- The user can also control the motions of the car by wearing a controller glove and making specified gestures.
III. SPECIFICATIONS OF SYSTEM, HARDWARE REQUIREMENT , FLOWCHART
This project application can be easily implemented under various situations. New features could be added when required. Reusability is possible as and when required in this project. There is flexibility in all the modules.
A. Hardware Requirement
- Microcontroller (ATmega328)
I/O-23 programmable lines
Operating voltage: 1.8-5.5V
Temperature range: -40°C to 85°C
2. Accelerometer(adxl345)
3-axis accelerometer(13-bit)
Supply voltage range: 2.0 V to 3.6 V
Small and thin: 3 mm × 5 mm × 1 mm LGA package
3. Motor driver(L293D)
Motor voltage Vcc2 (Vs): 4.5V to 36V
Maximum Peak motor current: 1.2A
Maximum Continuous Motor Current: 600mA
Supply Voltage to Vcc1(vss): 4.5V to 7V
4. RF Module
Transmitter power supply=3 to 12v
Receiver =5v
B. FLOWCHART
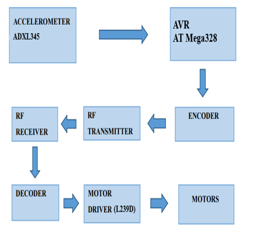
- The gesture-controlled robot is controlled by an accelerometer, which records hand movements and transfers the information to a microcontroller.
- After that, the data is passed into an encoder, which prepares it for RF transmission.
- The RF module in this case is. The information is received by the RF receiver and then sent on to the decoder on the receiving end.
- The encoder data is fed into the motor driver IC, which controls the motors in various configurations to move the bot in various directions.
IV. METHDOLOGY
To make the task easy and simple, and to avoid complexity and errors, it was divided into two parts. The first element is the transmitting section, which contains components such as an accelerometer, an encoder IC, and an RF Transmitter Module. The receiving end, on the other hand, is made up of the following basic components: an RF Receiver Module, a Decoder IC, a Microcontroller, a Motor Driver IC, and DC Motors. Only hand motions in the X and Y directions are recorded by the accelerometer, which outputs constant analogue voltage values. These voltages are supplied to the microcontroller, which analyses the data and converts it to a digital format suitable for transmission via the serial transmitter.
For communication, an RF pair is employed, which is connected to the microcontroller. The robot is controlled by a motor driver that is coupled to a microprocessor. To operate the robot, we used two DC motors, one of which is connected to the motor driver's output pin.
The motor driver for driving motors is also powered by a 9-volt battery.
V. RESULTS
As we insert the transmitter in our hand, the Gesture controlled robot moves according to our hand movement. When we place our hand in front of the robot, it begins to move forward and continues to do so until the next order is issued. When we move our hand backwards, the robot changes its state and begins moving backwards until another order is issued. When we tilt it to the left, Until the following command, the robot will turn left. When we put our right hand on the right side of the robot, it turns right. We also keep our hand in a steady position to halt the robot.
Conclusion
The major goal of the project was to create a robot-car that would run via wireless RF connection and hand gestures derived from an accelerometer (adxl1345). As a microcontroller, an Atmega328 was employed. The car makes the appropriate movements for the pre-programmed and calibrated hand gestures. With the help of the accelerometer, data from hand movements is supplied into the Encoder HT 12E via the microcontroller. After that, Tx 434 is used to convey the values. The values in the receiver section are received by Rx 434, which are decoded by a Decoder HT 12D and supplied to the motor driver L293D. As a result, the data collected from the motor driver is used to control the motors. Only when the accelerometer is moved in a specified direction according to the calibrated values of the accelerometer does the car move.
References
[1] https://www.researchgate.net/publication/254058120_MEMS_Accelerometer_Based_Nonspecific-User_Hand_Gesture_Recognition [2] Alphonsa Johny1 , Anusree Chandran2 , Heera Mary Thomas, National Conference on Recent Advances in Electrical & Electronics Engineering (NCREEE 2015) [3] Jiye Qian ,Bin Fang, Weibin Yang, Xiao luan, Hai Nan ; “ACCURATE TILT SENSING WITH LINEAR MODEL” ; SENSOR JOURNAL IEEE ,Volume :11, issue10, 2011. [4] Dogan Ibrahim, “ADVANCED PIC MICROCONTROLLER PROJECTS IN C: FROM USB TO ZIGBEE WITH THE PIC 18F SERIES.” [5] Muhammad Ali Mazidi, Janice Gillispie & Rolin D McKinlay; “THE 8051 MICROCONTROLLER & EMBEDDED SYSTEMS USING
Copyright
Copyright © 2022 Aditi Deo, Aishwarya Wankhede, Rutuja Asawa, Supriya Lohar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET46158
Publish Date : 2022-08-03
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online