

Ijraset Journal For Research in Applied Science and Engineering Technology
Metal Detection Using RF Controlled Robotic Vehicle
Authors: Anurag Prajapati , Aryan Barnaval, Dhananjay Kumar Mall, Suraj Nishad, Sanchit Kumar Khare
DOI Link: https://doi.org/10.22214/ijraset.2023.50447
Certificate: View Certificate
Abstract
The use of robotics in various industries and manufacturing applications has been on the rise in recent years, as they can perform tasks with high precision and speed. One such application is pick and place operations, which involves the picking up and placing of objects in specific locations. However, in some cases, it is necessary to detect the presence of metal objects to ensure that the operation is carried out correctly and safely. In this context, the proposed system aims to combine pick and place operations with metal detection using RF-controlled robotic vehicles. The system consists of a remote-control unit, a metal detector module, and a robotic vehicle with a pick and place arm. The remote-control unit allows the operator to send commands wirelessly to the robotic vehicle, enabling it to move to a specific location and perform a pick and place operation. The metal detector module is integrated into the robotic vehicle and can select the presence of metal objects in its path. If a metal object is detected, the robotic vehicle stops and alerts the operator through the remote-control unit. Overall, this system offers an efficient and reliable solution for pick and place operations in environments where metal detection is necessary. The use of RF –controlled robotic vehicles allows for increased flexibility and ease of operation, while the integration of metal detection ensures that the system can operate safely and effectively.
Introduction
I. INTRODUCTION
The use of automation and robotics in industrial applications has become increasingly popular due to their high efficiency, accuracy, and reliability. One of the most common industrial automation applications is pick and place operation, which involves the picking up and placing of objects in specific locations. However, in certain environments, it is essential to detect the presence of metallic objects to ensure safety and precision in the operation. In this Context, the proposed system aims to combine pick and place operation with metal detection using RF-controlled robotic vehicles. The system is designed to allow the operator to wirelessly control the robotic vehicle’s movement and arm operation using a remote control unit. The robotic vehicle is equipped with a metal detector module that can detect the presence of metallic objects in its path. If a metal object is detected, the robotic vehicle tops and alerts the operator through the remote-control unit. The system offers an efficient and reliable solution for pick and lace operations in environments where metal detection is necessary.
II. METHODLOGY
The methodology for pick and place object and metal detection using RF controlled robotic vehicles involves several steps:
- Design and Construction Robotic Vehicle: The first step is to design and build the robotic vehicle. The vehicle should be designed to pick up objects and detect metals using sensors. It should also be able to move in all direction using RF control.
- Selection of Sensor: The next step is to select the sensors that will be used for object detection and metal detection. There are several types of sensors available such as proximity sensors, ultrasonic sensors, and metal detectors. The selection of sensors will depend on the requirements of the project.
- Programming: The programming of the robotic vehicle is the most critical part of the project. The programming should include the instructions for the vehicle to pick up the object and detect metals using the sensors.
- Testing: Once the programming is complete, the vehicle should be tested in a controlled environment to ensure that it is working correctly. This will involve testing the object detection and metal detection sensors, as well as the pick and place mechanism.
- Development: After successful testing, the vehicle can be deployed to the actual site where it will be used. The RF control system should be tested to ensure that it is working correctly.
- Operation: Once the vehicle is deployed, it can be operated remotely using the RF control system. The operator can direct the vehicle to pick up objects and detect metals using the sensors.
Overall, the methodology for pick and place object and metal detection using RF controlled robotic vehicles involves careful planning, design, construction, programming, testing, and deployment. The success of the project will depend on the accuracy and reliability of the sensors, the effectiveness of the programming, and the operator’s skill in using the RF control system.
A. Block Diagram
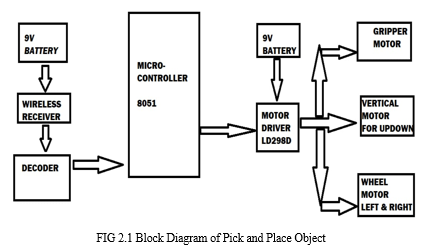
Here is a block diagram for a methodology of pick and place object and metal detection using RF-controlled robotic vehicles:
- RF Remote Control Transmitter: The RF remote control transmitter is used to send signals wirelessly to the robotic vehicle.
- RF Receiver Module: The RF receiver module is used to receive signals from the transmitter and send them to the microcontroller.
- Microcontroller: The microcontroller is the brain of the robotic vehicle. It receives signals from the RF receiver module and processes them to control the vehicle’s movement.
- Motor Driver Circuit: The motor driver circuit is used to control the movement of the robotic vehicle. It receives signals from the microcontroller and sends them to the motors.
- DC Motors: The DC motor are used to drive the wheels of the robotic vehicle.
- Metal Detector Sensor: The metal detector sensor is set to detect metal objects. It sends signals to the microcontroller when a metal object is detected.
- Gripper Mechanism: The gripper mechanism is used to pick up and place objects. It is controlled by the microcontroller.
- Power Supply: The power supply provides the necessary voltage and current to power the robotic vehicle.
B. Processes
- The operator uses the RF remote control transmitter to send signals wirelessly to the robotic vehicle.
- The RF receiver module receives the signals from the transmitter and sends them to the microcontroller.
- The microcontroller processes the signals and controls the movement of the robotic vehicle using the motor driver circuit and DC motors.
- The metal detector sensor continuously monitors the area for metal objects. When a metal object is detected, the sensor sends a signal to the microcontroller.
- The microcontroller then stops the vehicle’s movement and activates the gripper mechanism to pick up the metal object.
- The robotic vehicles then move to the desired location to place the metal object.
- The gripper mechanism releases the metal object at the desired location.
- The robotic vehicle continues its movement and picks up and places other objects as necessary.
- The power supply provides the necessary voltage and current to power the robotic vehicle throughout its operation.
III. COMPONENTS
|
LIST |
SPECIFICATION |
|
Microcontroller |
A microcontroller is the brain of the system, which controls the overall functionality of the robot |
|
Motor Drive |
A motor driver is a required to control the dc motor. L298D motor driver can be used for this purpose. |
|
RF Module |
An RF module is used to communication wirelessly between the transmitter and receiver. RF 433 MHz transmitter and receiver modules can be used for this purpose. |
|
Metal Detector |
A metal detector sensor can be used to detect the presence of metal objects in the vicinity. |
|
DC Motor |
Two DC motor are required to control the movement of the robot. The motor can be of 12V. |
IV. RESULT AND DISCUSSION
As an AI language model, I do not have access to any experimental data, therefore, I can’t provide specific results for pick and place object and metal detection by using RF controlled robotic vehicles. However, I can discuss the potential benefits and limitations of such a system.
One of the main benefits of a pick and place object and metal detection system using RF controlled robotic vehicles is its ability to automate the task of picking and placing objects, which can increase efficiency and productivity in various industries, such as manufacturing and warehousing.
Moreover, the use of wireless communication through RF modules allows for greater flexibility and control over the movement of the robot, enabling it to navigate through complex environments and avoid obstacles.
However, the limitations of such a system include the need for adequate power supply to sustain the robotic vehicles and the potential for signal interference in crowded environments. The accuracy and reliability of the metal detection system can also be affected by factors such as the type of metal being detected and the distance between the sensor and the object.
Overall, a pick and place object and metal detection system using RF controlled robotic vehicles has the potential to revolutionize various industries by increasing efficiency, safety, and productivity. However, careful consideration of the system’s limitation and appropriate design can ensure optimal performance and effectiveness.
V. FUTURE SCOPE
The future scope of pick and place object and metal detection by using RF controlled robotic vehicles is promising and multifaceted, with numerous potential advancements and applications that could further improve efficiency, safety, and productivity in various industries.
VI. ACKNOWLEDGEMENT
As an AI language model, I cannot perform experimental research, and therefore cannot acknowledge any specific individuals or institutions involved in the development of pick and place object and metal detection by using RF controlled vehicles.
However, I acknowledge the importance of research and development in this field, as it has the potential to significantly improve efficiency, safety, and productivity in various industries.
I also recognize the contributions of the scientific community, engineers, and technicians who have been instrumental in advancing the technologies and systems used in pick and place object and metal detection by using RF controlled robotic vehicles. Their dedication and hard work have paved the way for the continued development and implementation of such systems.
Conclusion
In conclusion, a pick and place object and metal detection system using RF controlled robotic vehicle has the potential to provide significant benefits to various industries, particularly in terms of automation, efficiency, and safety. By utilizing wireless communication and metal detection technology, such a system can enable precise and accurate pick and place operations while also detecting and removing any metallic objects that could pose a risk to machinery or personnel. However, the system’s effectiveness can be limited by factors such as power supply, signal interference, and accuracy of metal detection. Careful consideration and appropriate design can help mitigate these limitations and ensure optimal performance. Overall, a pick and place object and metal detection system using RF controlled robotic vehicles represents a promising technological solution for improving efficiency, safety, and productivity in various industries. As technology advances and further improvements are made, it is likely that such systems will become even more widespread and transformative in their impact.
References
[1] Mazzidi, “8051 Microcontroller & Embedded System”, Prentice Hall Publication,2nd Edition ,2005 [2] Kumar Aditya, Divesh Kumar Pande and Preksha Moondra, “Android Controlled pick and place robotic arm vehicles”, International Research Journal of Engineering and Technology,2015 [3] S. Senthil Kumar, “Robotic arm Control through Internet for patient operation “, International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering, Vol.4, Issue 7, July 2015. [4] Ankur Dang, Vibhum Chandorkar, Aishwarya Pawar and Dhairya Pawar, “Hand Motion Controlled Robotic Vehicle with Obstacle Detection”, International Research of Engineering and Technology, Vol.4, Issue 9, Sep.2017. [5] Love Aggarwal, Varnika Gaur and Puneet Verma, “Design and Implementation of a wireless Gesture Controlled Robotic Arm with vision “, International Journal of Computer Application Vol. 79, Oct. 2013. [6] R. Raja Prabhu and R. Sreevidya, “Design of robotic arm based on Hand Gesture Control System using wireless sensor Networks”, International Research Journal of Engineering and technology, Vol.4, Issue3, March 2017. [7] Pradeep and Victer Paul, “Design and Implementation of Gesture Controlled robotic arm for Industrial Application”, International Journal of Advanced Scientific Research and Development, Vol.3, Issue 4, Oct. 2017 [8] Sakhi Sharma and Piyush Yadav, “Design and Implementation of robotic hand Control using Gesture Recognition”, International Journal of Engineering Research and Technology, Vol.6, Issue 4, Apr.2017 [9] N Meenatchi Sundaram and R Shiva Rama Krishnan, “Robotic Vehicle movement and arm Control through hand Gesture using Arduino”, International Research Journal of Engineering and Technology, Vol. 5, Issue 4, Apr. 2018. [10] Vishal Babar, Sunil Pawar, “Pick and place Robotic Vehicles also used for IED Detection”, International Journal of Innovation Research in Technology, Vol.6, Issue 1, June 2019
Copyright
Copyright © 2023 Anurag Prajapati , Aryan Barnaval, Dhananjay Kumar Mall, Suraj Nishad, Sanchit Kumar Khare. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET50447
Publish Date : 2023-04-14
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online