

Ijraset Journal For Research in Applied Science and Engineering Technology
Mitigation of Power System Transients in a Multi- Machine System Using STATCOM
Authors: Vinoda Patil, Prof. Nandakumar
DOI Link: https://doi.org/10.22214/ijraset.2022.43034
Certificate: View Certificate
Abstract
The tremendous expansion of linked power systems as a result of rising electrical energy consumption has created a slew of problems. FACTS (Flexible Alternating Current Transmission System) controllers become crucial in these situations. This paper investigates the transient stability enhancement of IEEE 9 bus system using STATCOM. The damping power oscillations and power swings and setting time is observed with and without STATCOM.
Introduction
I. INTRODUCTION
Static synchronous compensators is one of the most significant tool for energy flow regulation & power quality, allowing a function to be used without sacrificing performance expectations. Transformers, motors, computers, printers, communication equipment, and many forms of domestic machinery are examples of equipment. These mentioned equipment’s had a negative impact on power quality [1]. Even though the voltage magnitude of the bus voltages are necessary maintain within the prescribed limits, reactive power cannot be transported when there is a big load in the network [2]. Voltage instability might cause the network to go down completely or partially. STATCOM does have the benefit of being able to efficiently regulate & inserted current into the bus [3]. STATCOM is also used for voltage sag/swell compensation, suppressing harmonics of line currents and improving load power factor, and reactive power modification in transmission lines and in the load, where STATCOM also mitigates bus voltage level [4, 5]. Adjusting the inserted voltage magnitude and phase angle using "Voltage Source Converter" for managing the powers "active and reactive" of Static synchronous compensators [6] is suggested for STATCOM that stores energy. In the literature, many different approaches to implementing voltage profile augmentation have been proposed. In [7], the voltage profile is improved by employing a PI controller. [8] shows where STATCOM should be placed to improve voltage profile. Use of SVC to enhance the voltage profile is discussed in [9.]. The necessity to change each working point, a poor reaction time, and a lack of smoothness are all downsides of using a PI controller. The use of static VAR compensator has passive characteristics that influence system tune and cause oscillation in response. The application of d-q theory to estimate reactive power and bus voltage for STATCOM compensation.
II. COMPENSATION AND REGULATION OF VOLTAGE
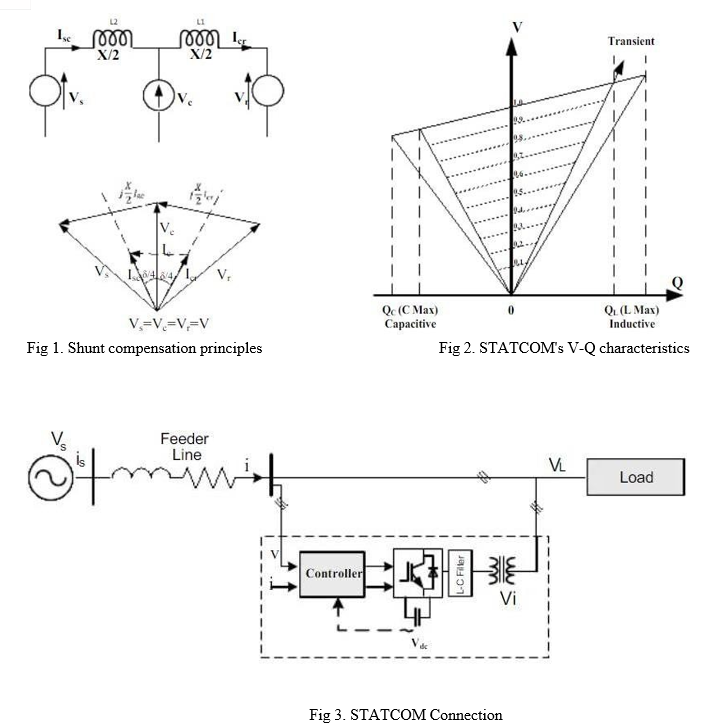
Figure 1 presents the shunt device connections for bus voltage control. The model includes a power transmission line, a supply voltage, & load, with the injection in the middle. The line current angle is related to the load side, implying that the active component of current (IC) is injected to enhance line current and then load voltage, according to the phasor diagram. By injecting or absorbing current (IC) into or out of the network, the current source device accommodates the load reactive component. As a result, voltage regulation was enhanced, and the source current's reactive component was decreased. For effective operation, the inductive load requires enough reactive current, thus It should be fed from the source, which will boost the line current from the region. as shown in figure 2. If reactive power is fed close to the supply current & the load area can be lowered, which improves voltage at the load side[10]. The regulation can be improved using one of three methods: a bank of capacitors, a VSI (voltage source inverter), or a CSI (current source inverter) [11]. In the event of a severe abnormal condition in which the bus voltage deviates from the compensator's typical range, the STATCOM provides voltage to support the system [12]. The primary benefit of using a voltage source converter VSC is that reactive power can be created independently of line current (thus eliminating the need for capacitors) [13]. As shown in Figure 3[15], the STATCOM is connected before the load in the distribution system.
III. BASIC STRUCTURE OF PI-BASED STATCOM
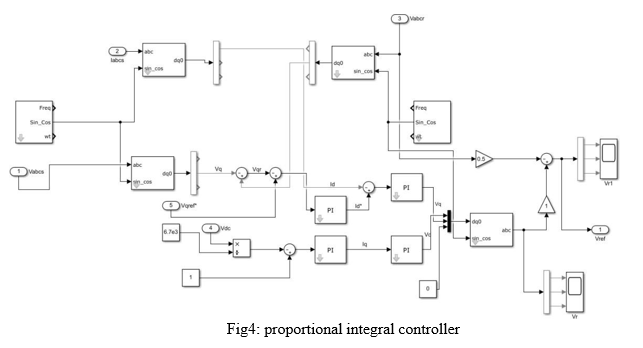
PI controller input is from bus 8 and output is bus 9, these are also named as Vabcs, Iabcs, and Vabcr, Iabcr capacitor value is also given to the input is label as Vdc and Vqref* for a constant value. The transmission line parameters flow incessantly from the sending end to the receiving end under stable working conditions. The Measurements block keeps track of the transmission parameters and reports them to the proportional integral controller on a regular basis In this controller block, the measurement block's T-L parameters are compared to the nominal rated values. If the difference between these values is zero, the setting block will not generate a pulse signal and the Converter section will not receive one. The proportional integral controller will raise an error if the data sent by the measurement block differs from the nominal rating values included in this process. The setting block sends a signal to the proportional integral controller block on a regular basis during this problem circumstance. This is given to converters, one of which is a shunt compensation converter. Until and unless the Measurement block parameters and the specified nominal rated values in the Measurement block are changed. This is supplied to the converters, one of which is a shunt compensation converter. The proportional integral controller allows pulses from the settings block until and unless the Measurement block parameters and the predefined nominal rating values in the control block agree. The proportional integral controller stops the pulse from the settings block to the shunt converters compensation after these values are matched.
IV. TRANSIENT STABILITY ENHANCEMENT WITH FACTS
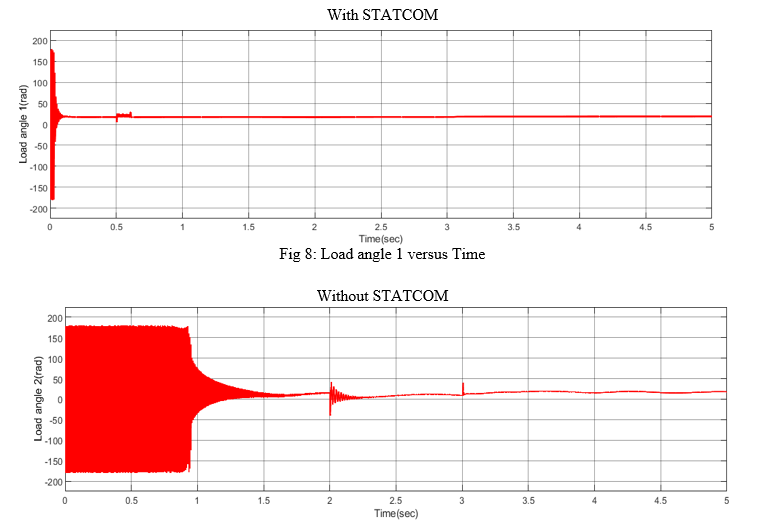
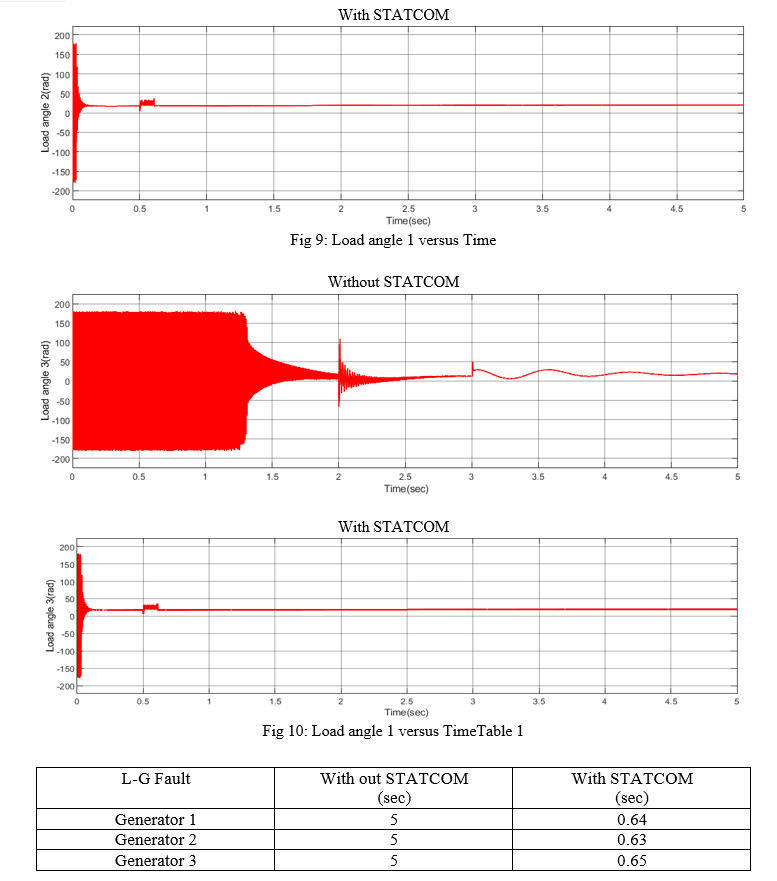
Figures 5 to 15 show the rotor behavior in MATLAB/SIMULINK for three synchronous generators: 1, 2, and 3 Figures 8 to 10 demonstrate how the Rotor angles increase and go out of synchronism with and without the FACTS devices. When the dynamic model with FACTS is simulated, the responses start to decrease. In general, the three FACTS minimize the rotor angle acceleration for the three generators. The rotor angle of generator 1 lowers the most for many of the devices, followed by the angle of generator 3, and the least decreasing rotor angle is that of generator 2. The damping characteristics of the FACTS devices connected cause the decline. With STATCOM, the drop is more pronounced.
V. INTERPRETATION AND OUTCOME
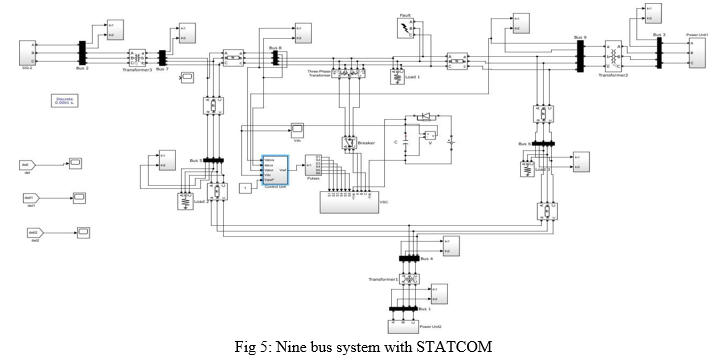
The Single-line Ground, & Three-Line-Ground faults are evaluated in the multi-machine power shown in Figure 5. The performance of the system with and without gratification is also examined. Figures 4 to 15 depict the system's performance when faults occurred between buses 8 and 9 at 0.5 seconds and were rectified at 0.6 seconds. The system was tested in two scenarios: first, for an uncompensated system, and subsequently for a system that used STATCOM. The technology was tested in two scenarios: uncompensated and compensated by STATCOM. To evaluate and assess the effectiveness of the proposed controller, two types of faults are applied to the supplied system in this study.
A. Case: 1 Single-Line Fault
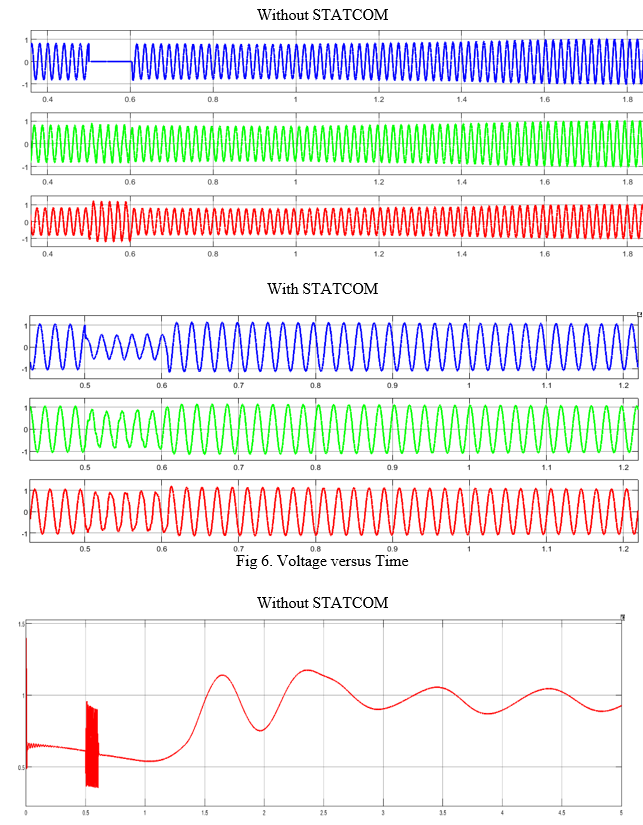
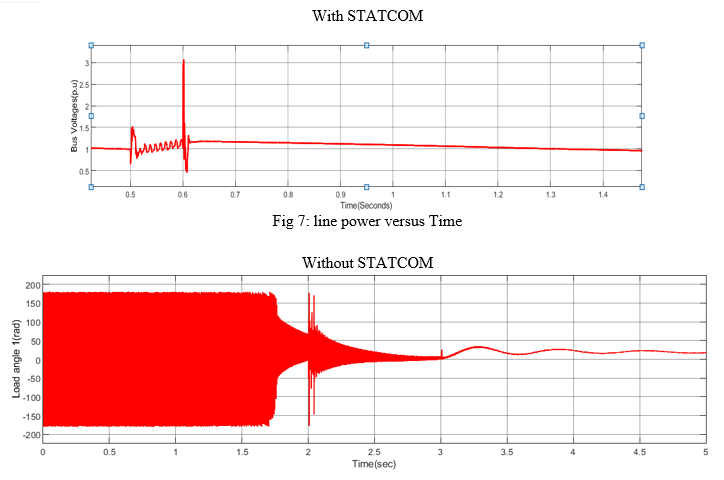
Figure 6 depicts the time response of line voltage for both the structure with & without STATCOM. LG issue affects more than one line; it also affects two other lines. After adjustment, the device voltage improves to 0.8 volts, and the voltage of the other two lines improves as well. In the lack of compensation, the findings plainly show that the system is not well damped (5sec). When the STATCOM controller is utilized, oscillations are damped out after 0.62sec, indicating that the oscillations are mitigated after the disturbance is cleared. The time response of load angle is depicted in Figures 10, 11, and 12. Fig convincingly shows that when no compensation is incorporated in the system, the system is unstable and oscillation occurs continually at first, even after STATCOM is installed power oscillation damping is less by observing waveform & Table 1 below. Peak overshoot is also decreased when the system is equipped with a STATCOM module.
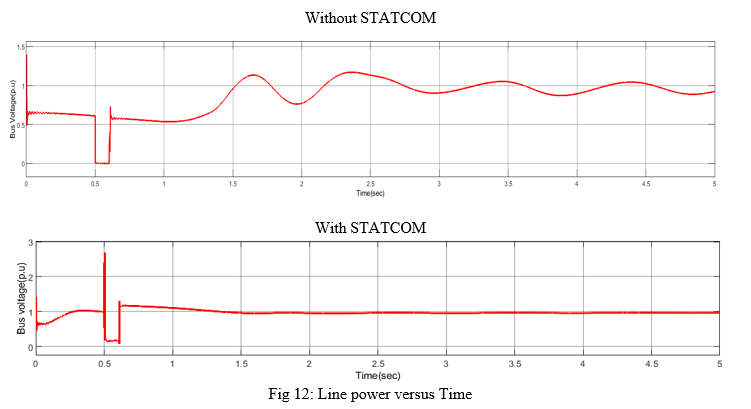
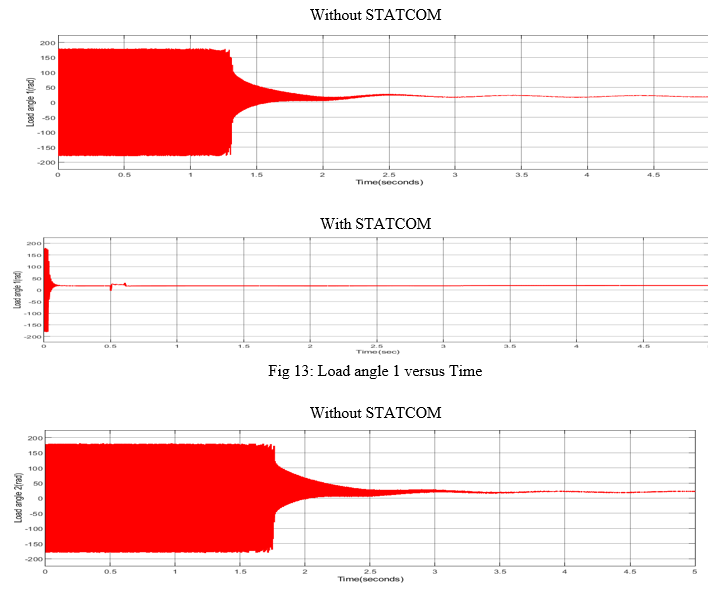
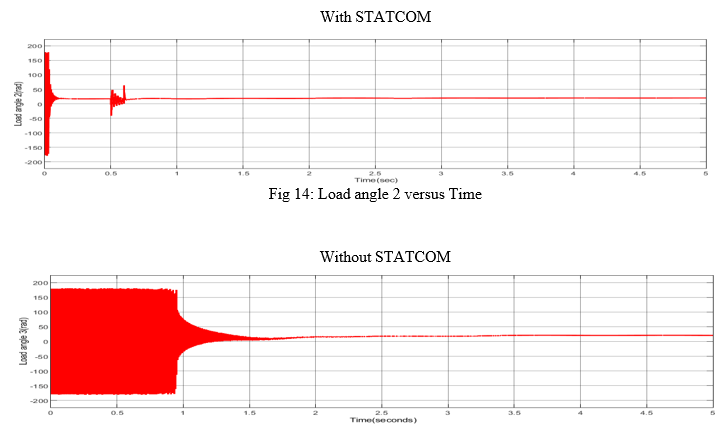
B. Case:2 Three-Line to Ground Fault
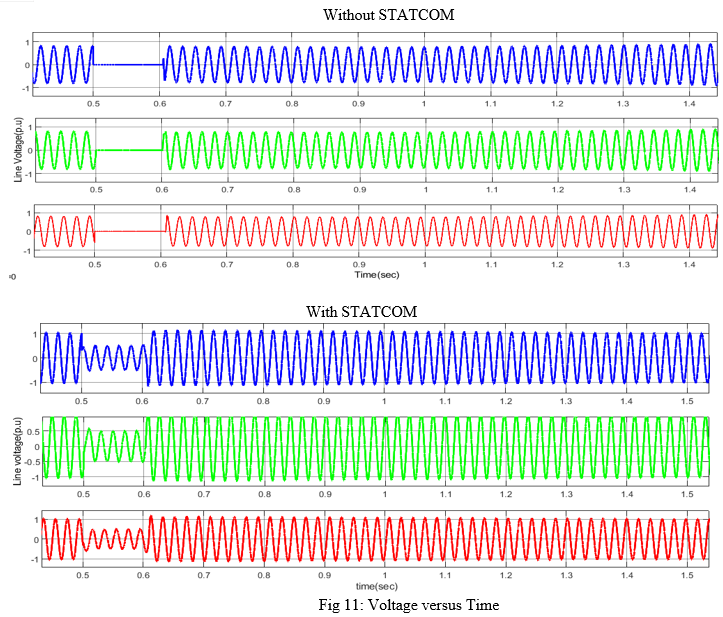
The LLLG fault for line voltage vs. time is shown in Figure 11. After the compensation device voltage level is improved by 0.5volts in the LLL-G fault situation, all three line voltages are zero for a time period of 0.5 to 0.6sec. The bus voltage vs. time without STATCOM power osculation dampening is 5 seconds, as shown in Fig 12. The power osculation damping is reduced by up to 1 second when the compensation device is installed. Fig 13,14,15 shows that load angle w.r.t time G1 is far away from the fault so the number of power osculation damping is less & G2, G3 is near to fault number of power oscillation damping is more compared to G1. It is well damped out when the compensation device is fitted in between bus no.0.8 and bus no.9, as indicated in table 2 below.
Conclusion
This study investigated the impact of a STATCOM on the settling time of power oscillations and the transient peaks of line voltage, bus voltages, and rotor angle after disturbances. The recommended controller is investigated or tested for two forms of disturbances when applied to a multi-machine system: L-G and LLL-G fault. A 3-phase fault is more effective than an L-G fault, and a 3-phase fault is more severe than other faults, it has been observed. It may also be demonstrated that after the occurrence of a defect, all parameters\' settling times and transient peaks are reduced. Hence, this proposed controller is used to improves the stability of the system under different fault conditions.
References
[1] Joel.R. Sutter,Jomo Kenyatta University of Agriculture and Technology,P.O Box 62000-00200, Nairobi, KenyaTransient Stability Enhancement with Application of FACTS Devices. [2] Mohammed Y. SulimanVoltage profile enhancement in distribution network using STATCOM. [3] UNDEEP SIDDULA IMPROVEMENT OF POWER QUALITY USING FUZZY BASED UNIFIED POWER FLOW CONTROLLER. [4] Salman Hamee Mitigation of Power System Transients in a Multi-Machine System using Unified Power Flow Controller. [5] E. Acha, C. Fuerte, H. Ambriz and C. Angeles-Camacho, \"FACTS Modeling and Simulation in Power Networks\", John Wiley & Sons Ltd, pp 21-23, 2004. [6] P. Kumar, “Enhancement of power quality by an application FACTS device,” International Journal of Power Electronics and Drive Systems (IJPEDS), vol.6, no. 1, pp. 10-17, 2015. [7] A. Oukennou, et al., “Coordinated Placement and Setting of FACTS in Electrical Networks based on eqKalai-smorodinsky Bargaining Solution and Voltage Deviation Index,” International Journal of Electrical andomputer Engineering (IJECE), vol. 6, no. 6, pp 4079-4088, 2018. [8] R. Mathur and R. Varma, \"Thyristor-based FACTS Controllers for Electrical Transmission Systems,\" Wiley-IEEE Press Power engineering, Piscataway, NJ, Mar, pp 34-36, 2002. [9] Hingorani and L. Gyugyi, \"Understanding FACTS, Concepts and technology of flexible AC transmission systems,\" IEEE Press, pp 172-174, 2000. [10] B. Yang, G. Zeng,Y. Zhong and Z. Su, \"Cascade STATCOM step wave optimization based on PSO,\" IEEE International Power Electronics and Application Conference and Exposition, pp1445-1450, shanghai, china, 2014. [11] S. H. Qazi and M. W. Mustafa, \"Improving Voltage Profile of Islanded Microgrid using PI Controller,\" International Journal of Electrical and Computer Engineering (IJECE), vol. 8, no. 3, pp 1383-1388, 2018 [12] S. Hocine and L. Djamel, \"Optimal number and location of UPFC devices to enhance voltage profile and minimizing losses in electrical power systems\", International Journal of Electrical and Computer Engineering (IJECE), vol.9, no.5, pp 3981-3992, 2019. [13] B. Singh and G. Agrawal, \"Enhancement of voltage profile by incorporation of SVC in power system networks by using optimal load flow method in MATLAB/Simulink environments\", Energy Reports, Elseier, vol 4, pp 528-535, 2018. [14] Anulal A.M, A. Mohan and Lathika B.S, \"Reactive power compensation of wind-diesel hybrid system using STATCOM with Fuzzy tuned and ANFIS tuned PID controllers\", International Conference on Control Communication & Computing India (ICCC), pp. 325-330, Trivandrum, 2015. [15] C. Amos “POWER SYSTEM STABILITY AND QUALITY IMPROVEMENT USING FACTS DEVICES” Arid Zone Journal of Engineering, Technology and Environment, March, 2018; Vol. 14(1):125-133
Copyright
Copyright © 2022 Vinoda Patil, Prof. Nandakumar . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43034
Publish Date : 2022-05-21
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online