

Ijraset Journal For Research in Applied Science and Engineering Technology
Mobile Gas Leakage Detection System
Authors: Anagha R, Abhishek Rao, Varshini B S, Sonal K S, Dr. Parameshwara S
DOI Link: https://doi.org/10.22214/ijraset.2022.45221
Certificate: View Certificate
Abstract
The most prominent industrial disasters are caused due to gas leakage. One of the preventive methods to stop accident associated with the gas leakage is to install mobile gas leakage detection system at vulnerable places. The aim of this paper is to present such a design that can automatically detect the gas leakage and send alerts to the nearby workers in vulnerable premises. Gas sensor has been used which has high sensitivity for propane (C3H8) and butane (C4H10). Gas leakage system consists of Arduino microcontroller with inbuilt Wi-fi module (ESP8266), ultrasonic sensor for crack detection, MQ2 sensor for gas leakage detection and Blynk app to receive the alerts. This paper provides the design approach on both software and hardware.
Introduction
I. INTRODUCTION
The purpose of this qualitative study is in two parts: (a) to build a mobile gas leakage detection system that will traverse throughout the length of a pipe and detect any cracks, corrosion, or gas leakage (b) to send alerts for evacuation to the residents in case of toxic gas leakage. The nationwide lockdown caused a lot of industrial accidents after its reopening. These accidents were mainly due to machinery malfunction, decay in infrastructure, and poor maintenance. One of the more prominent disasters was gas leakage.
Some examples are the Vishakhapatnam Gas Leak tragedy, where Styrene, a neurotoxin, leaked into the atmosphere due to the stagnancy of 6 weeks. In the Raigarh case, poisonous gas accumulated in the recycling chamber of a paper mill during the six weeks of lockdown causing the hospitalization of maintenance workers. The boiler blast in Neyveli Lignite Corporation India happened when the unit accumulated extra pressure which the employees were unable to bring under control. It ignited a cache of oil kept nearby and caused a flash fire that resulted in eight workers being hospitalized. The Pune incident happened when a chemical manufacturing unit located in Kurkumbh MIDC on Pune-Solapur Road near Pune had burst into flames. The fire started from drums containing acetone and ethanol stored at the plant. No casualty was reported in the incident as the plant was closed.
In all these cases, leakages couldn’t be detected in their earlier stages. By the time they were able to do so, there was mass damage, both to the machinery as well as human lives.
Industries can’t afford to replace entire sections of pipes; therefore, it is important to have a system detect gas leakages or surface cracks of pipes, or even potential cracks in places of high corrosion. Thus, it was thought that a robot which would traverse on a pipe and detect these defected areas would be a better solution.
II. LITERATURE REVIEW
A literature review was conducted to help understand the concepts used in the project better. They were as follows.
- Autonomous control and implementation of coconut tree climbing and harvesting robot– This paper focuses on the designing a low-cost coconut tree climbing and harvesting robot. The mechanical frame is designed in draft sight software and is implemented using aluminum segments and threaded rods. Referred from the International Conference on Computational Modeling and Security (CMS 2016)
- Crack Detection robot in underground gas pipelines using FPGA – This paper focuses on the use of ultrasonic sensors and Diligent Nexys-4 FPGA board for detecting cracks in underground pipes.
- Gas Sensor Using Arduino UNO & MQ2 Sensor – This paper discusses the use of an Arduino based MQ2 sensor which will detect gas leakage especially LPG and natural gases. Buzzer alarm will be turned on as an alert mechanism to inform the locals that there is a leakage of gas somewhere
- Railways Track Crack Detection System using Arduino - This project involves detection of cracks using IR-sensor and the ultrasonic sensor of a faulty rail track and the transmission of the report via an SMS to the nearest control tower if a faulty track is identified. This is very similar application, but different use case for the project being discussed in this paper.
- IoT Based System for Monitoring and Control of Gas Leaking – Finally we have in this paper, an IoT based system for monitoring and controlling Liquefied Petroleum Gas (LPG). NodeMCU is used as the controller of this system where it processes the data of gas concentration and flame occurrence. Here the usage of Blynk Application is discussed, from which inspiration for this paper has been taken.
III. METHODOLOGY
A. Hardware aspects
The mechanical design of the robot is a major factor in making it agile and flexible. The robot must be able to expand and contract to tackle the varying diameters of pipes. It must also contain enough power in its motors to lift the entire robot up a vertical pipe. The wheels must have enough friction to prevent slipping of the robot, even against vertical pipes. Also, the robot should be able to balance the weight of the components and be easy to manufacture. It should run on an independent, portable power supply, so it is not cumbersome, and limited by length of the wire. The chassis must also be compact so that it can travel in areas where there are many pipes clustered together.
B. Monitoring
The robot monitors several factors like percentage of toxic gases, presence of cracks in the pipelines and the temperature of the given area. We have planned to interface the relevant sensors with our microcontroller to fulfil these operations.
C. Crack Detection
Detection of cracks in the pipeline can be done in the following ways:
- Using Ultrasonic Sensors: Since Ultrasonic sensors use the principle of sending High frequency sound waves to measure an object’s distance based on the reflected pulse, the same operation can be used to detect cracks. However, it doesn’t provide very accurate results.
- Using Camera Module: By interfacing the camera module with the Microcontroller and using Image processing algorithms like Gaussian Edge Detection, we will be able to get an accurate image of the pipe where there are many pipes clustered together.
IV. IMPLEMENTATION
A. Surveys
Visits to different factories in and around Mysore were conducted to better understand the size of pipes used and types of gasses that they transported. Most factories were found to have Sulfur Oxides and Polymers harmful for human health used for various processes in the factories. It was found that all the pipes in the factory were to be checked every few years, to process corrosion levels and inspect cracks. This proved to be a challenge for many factories as they had to reach normally difficult-to-access or inaccessible areas, to inspect some pipes.
Next, the pipes themselves were closely inspected. Each pipe could turn into various angles, split of into two, or vary in diameter along the length of the pipe. Each pipe was connected to another pipe via a clamp, and the pipes had various types of valves that ran through their lengths. Finally, it was found that each type of gas had different levels of allowable ppm leakage.
B. Mechanical Design
Initially the mechanical design of the chassis was created in a square shape.
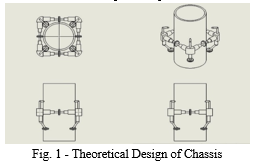
This preliminary shape was created keep in mind that each side of the square chassis were broken into three main parts. The corners, which would contain space for the sensors, and on the bottom would have immovable wheels which would act as additional friction for the robot, to prevent slipping. Next the middle section would contain motors, which would be attached to a spring mechanism, which would be stretched, which would pull the motors towards the corners, compressing the frame. The mechanism is like that of a rubber band around the pipe, try to compress as much as possible, to stick onto the pipe, without slipping. Finally, the wheels.
There were multiple problems with this design. Firstly, the wheels at the bottom of the chassis which were designed with the sole purpose of adding friction meant the motors must be supplied with enough voltage for them to drag the wheels and overcome their friction. Moreover, as the diameter would increase, the wheels would not all be able to rest on the circumference of the pipe as the arc of the circle changes with the diameter.
Next, if the motors were to be kept in the center, then the balancing if weights on each side would be difficult, and the servicing and changing of motors would be difficult too. Moreover, it would be better if the expansion, contraction mechanism and the motors were separated. Springs lose tensile strength quite quickly, and it was found that the robot would need continuous servicing for the spring mechanism, as it would start slipping after regular use within a short period of time. Therefore, another mechanism would have to be thought of.
Lastly, the sensors must be placed as closely as possible to the pipe to get accurate results. Keeping sensors at the corners of the square meant that they were being kept at the furthest point.
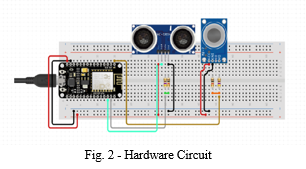
Therefore, the current design of the robot has four roller wheels on the sides that assist its motion along the length of the pipe and there are grip wheels which help in increasing the friction of the chassis with the pipe. Each wheel is attached to an independent motor. The chassis is made up of solid iron. Even though the chassis is quite heavy, the 12V DC geared motors can move the chassis at reasonable speeds. To cope with the fact that the robot will need to expand and collapse over various valves and overlaps of the pipes, a circular chassis, cut into two semicircular halves, with each half attached via a screw and bolt for creating an expandable structure. A circular chassis was chosen as it would help stabilize the robot, preventing it tilting to one side when traversing through the pipe, as well as making it easier for the motors to be attached. As the sensors were needed to be placed close to the pipe, a ledge was made from the circumference of the chassis towards the center, and a 90-degree platform was created so that it was parallel, close to the pipe. This was used to attach the sensors. These eliminated most of the issues found in the previous designs.
V. HARDWARE AND SOFTWARE DESIGN
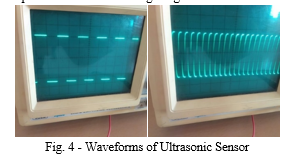
The Function of the robot is to detect Cracks and Gas Leakages and send alerts during an anomaly. We have used Nodemcu along with Ultrasonic and MQ7 sensor to achieve this purpose. Nodemcu is a microcontroller unit that uses the Wi-Fi Protocol to connect to the internet. It is preferred over Arduino because of better processing speed and better memory.
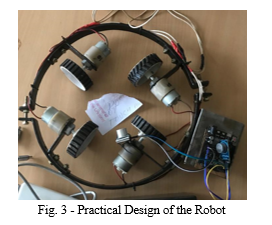
- Crack Detection: The Detection of Cracks is done using the Ultrasonic sensor. The Sensor sends High Frequency Sound waves and based on the Reflected Pulse, the distance of an object can be accurately measured. The trigger an echo pulse was measured using an oscilloscope and they are represented in the following Diagram.
The Ultrasonic Sensor was chosen instead of Camera Module because it does not require a constant Light Supply and since it is cost efficient, the robot can be manufactured at an Industrial Scale. Another advantage of using an ultrasonic sensor is that it does not require a lot of computational power since it does not employ Machine Learning Algorithms.
2. Gas Detection: As the Robot moves along the Pipeline, it must be able to detect gas Leakages. This is done using the MQ7 Sensor, which detects Hydrogen. Since several Harmful gases like Propane are compounds of Hydrogen, this sensor was used. Based on the preferred Gas to be detected, the sensor can be swapped with a different model in the same series.
3. Sending Alerts: The Robot sends alert using the Blynk application. Blynk provides a mechanism through which we can communicate between the Smartphone and Hardware. Blynk is an “Internet of Things” (IoT) platform that allows you to build your own apps to control certain devices over the internet.
VI. RESULTS AND DISCUSSION
The designed robot can detect cracks along the length of the pipe and detects the presence of gases leaking from the cracks on the pipe. Alert messages are sent through Wi-Fi module in-built in the Arduino board to electronic devices for both the cases. The bot is adjustable to properly fit around the diameter of the pipe on which we need to monitor gas leakage and cracks. It is composed in such a way that there is no chance of the model to fall or cause issue to the pipe.
The key points we noted while coming up with the project are:
- Circular chassis for the shape of the robot was fixed as it is convenient to place the motors, micro controller and sensors on this platform which additionally provides mechanical stability for the movement of the robot. The fact that Arduino is simple to use, cost efficient to implement, easily available and since it met all our technical requirements made us consider it over other micro controllers.
2. This model does not support the necessary centripetal and frictional force to traverse through the curvy edges but is effective for straight paths.
3. Since ultrasonic sensors lack the ability to detect extremely tiny cracks, to compensate this drawback we use the gas sensor which can identify the high-pressure gas leaking from the small openings.
4. Another challenge was to find appropriate materials that can withstand the environment of the industries in-terms of temperature, humidity, sound, and vibrations.
5. This is a feasible basic approach for our use case of gas detection, further there is scope for an improvised model to overcome the limitations observed.
Conclusion
This robot can be used in all industries where there is gas being transported by pipes. Moreover, it can be used as a surveillance system, or help in maintenance. The application of this robot can later be expanded and combined with several other robots to create an entire disaster-management system, which helps in prevention, and solution of disasters. It can also be used to estimate life expectancy of each pipe section. Thus, we have proposed a low cost, accurate system that can detect and alert officials during the time of disasters. There are many future applications for this project. For now, this robot can only be used on straight pipes, and needs to be physically disconnected and connected whenever it encounters a T-junction. Therefore, the robot can be modified to cross T-Junction pipes. Another scope of this project is that the robot can be attached with a paint gun, where it sprays paint on the pipes to prevent corrosion and ultimately cracks. The robot can also be linked with the main gas-regulation system which when encountering a crack of significant width, with more than a threshold amount of gas leaking from the pipe, can automatically shut down the system to prevent further harm. Finally, it can be integrated with more robots of the same to cover multiple branches of the industry.
References
[1] Sahu Internet of Things (GSM) Based Gas Leakage Monitoring and Alerting System with MQ-2 Sensor, International Journal of Engineering Development and Research, 2017. [2] Dimitrina Kindova-Petrova, Vibration-Based Methods for Detecting A Crack In A Simply Supported Beam Journal of Theoretical And Applied Mechanics, Sofia, Vol. 44, No. 4, Pp. 69-82, 2014. [3] M. Salman, S. Mathavan, K. Kamal, M. Rahman, Pavement crack detection using the gabor filter, Proceedings of 16th International IEEE Annual Conference on Intelligent Transportation Systems, 2013. [4] Baldev Raj, V. Rajendran, P. Palanichamy, Science and Technology of Ultrasonic Book, 2004. [5] Tanaya Das, Dhruba Jyoti Sut, Vishal Gupta, Laskyajit Gohain, A Mobile Robot for Hazardous Gas Sensing, IEEE 2020 International Conference on Computational Performance Evaluation (ComPE), 2nd July, 2020.
Copyright
Copyright © 2022 Anagha R, Abhishek Rao, Varshini B S, Sonal K S, Dr. Parameshwara S. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45221
Publish Date : 2022-07-01
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online