

Ijraset Journal For Research in Applied Science and Engineering Technology
Modification of IoT Enabled Fertibotix Machine
Authors: Ms. Saniya Lade, Ms. Prachi Lade, Ms. Divya Chandiwale, Mr. Ankit Barodkar, Mr. Dinesh Ghate, Mr. Grishal Gaydhane, Prof. S. S. Ghosh
DOI Link: https://doi.org/10.22214/ijraset.2022.45619
Certificate: View Certificate
Abstract
Soil is of great importance to agriculture, especially the moisture and nutrients in the soil are the essential ingredients for growing plants and crops. Therefore, benefits and importance of a soil moisture and nutrient monitoring system in modern agriculture and gardening is undeniable. It can also be an interesting feature of an intelligent home or smart agriculture system using the internet of things (IoT) technology. This paper presents an IoT application in Arduino platform aiming to monitor the change in soil moisture and Nitrogen (N), Phosphorus (P), Potassium (K) (NPK) value for an indoor plant using moisture sensors and optical transducers. Other functionalities and important features of this prototype include online data display infographic as user feedback, level-based nutrient classification for enabling proper type of fertilizer selection, hardware and e-mail notification of moisture and nutrients\' easily accessible and user-friendly smartphone app.
Introduction
I. INTRODUCTION
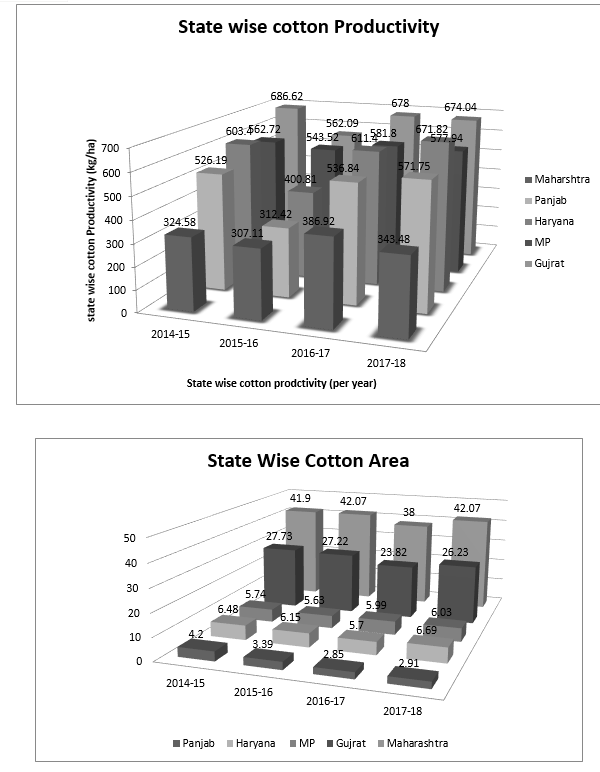
In this study we investigated the effects of N fertilization on cotton growth and yield, and on arthropod populations and the activity of arthropod natural enemies in cotton. Specifically, we tested the following hypotheses N fertilization will correlate positively with cotton plant growth. Increased N fertilization will increase pest populations because plants with more N will be more nutritious for and attractive to herbivores. Out of them solid fertilization is one of the most important and day-to-day job of the farmers. With the help of automation the work becomes easy and errorless. Robots small sized wheels performs well, the lightweight of the robots do not compact the soil.
The idea of applying robotics technology in agriculture is very new. In agriculture, the opportunities for robot-enhanced productivity are immense – and the robots are appearing on farms in various guises and in increasing numbers. We can expect the robots performing agricultural operations autonomously. Due to lack of technical knowledge most of the processes are still traditional. Even though mechanization is introduced into agriculture, its use is quite low. The main factor responsible for this problem is that the high cost of farm machineries. Most of the farmers have small share of land in their possession and cannot afford to own these machineries also the hourly rent for these machines is not feasible. Thus need of low cost agriculture machines arise. The machine should be value for money. The following machine should have multiple uses in agriculture. It should be handy and easy to operate.
II. PROBLEM STATEMENT
We aim to modify existing machine which is used to placed the fertilizer under soil for cotton crop using IoT enabled operation for better performance compared to existing one.
Drip irrigation is less wasteful than sprinklers. It isn't always only extra green for fertilizer usage, but can also be for maximizing nutrient uptake in vegetation like cotton. Drip irrigation the usage of fertigation can also increase yield and first-rate of it and plants, especially in subsurface drip structures instead of above floor drip tape. Sprinkler structures leaf and fruit fine. Continuous application Fertilizer is provided at a constant fee. Three- stage application-Irrigation starts with out fertilizers. Fertilizers are implemented later inside the method. Proportional application-Injection fee is proportional to water discharge rate. Quantitative software- Nutrient answer is carried out in a calculated amount to every irrigation block. Other techniques of application encompass the lateral flow, solid set structures. Concentration of the answer may additionally lower as the fertilizer dissolves, this depends on gadget choice. If poorly decided on may additionally lead to bad nutrient.[1]
III. BLOCK DIAGRAM
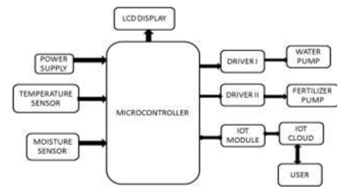
It consist of a tank with segment. If the user is enter the type of plant by using mobile that system will mix the needed fertilizer with water and sprayed to the plant through the sprayer machine. In this block diagram, PIC16F877A Microcontroller is a open source programmable device which is programmed in MP Lab compiler .5v Power supply is given to microcontroller. It consist of two sensors temperature and moisture sensor which is placed in the soil to sense the temperature and moisture ratio. Both the sensor are interfaced with microcontroller temperature and moisture data will be collected continuously in the IoT module and the data will be stored in the IoT cloud. If there is any change in the predetermined data it will be indicated in the mobile phone and the required amount of fertilizer ratio will be displayed in the Liquid Crystal Display Correlation: It gives the measure of pixel how itis correlated to the neighbour of the whole image. The value is 1 or -1 for perfect positive or negative image.
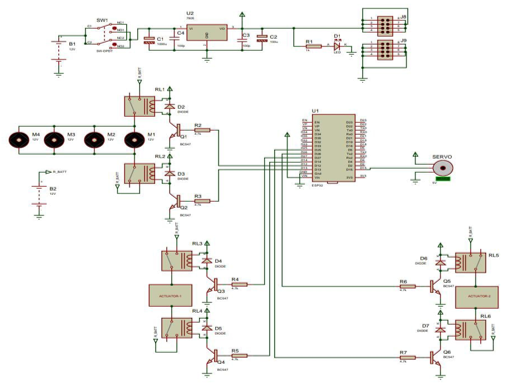
IV. CIRCUIT DIAGRAM
V. RESEARCH METHODOLOGY
A. Material Selection
For study the working mechanism of fertilizer robot under multilayer fertilization technique an experimental investigation performed.
B. Mechanical Material
Material selection is a step in the process of designing of any physical objects in the content of product. The main goal of material selection is to minimize cost while meeting performance goals.
- Mild Steel – For the fabrication of chassis we select mild steel square rod as it lighter in weight which is 20*20mm.
- Acrylic SHEET – Acrylic sheet is used for making a Hopper.
- Pedestal Bearing – It is to providing support for a rotating shaft.
- Flexible Pipes – For deliver the fertilizer to the slider mechanism.
- Bright Bars – Bright bar is mounted on the wheels which propel the robot.
C. Electronic Materials
Electronic materials are for designing the PCB (Printed Circuit Board) and developing the Software to control the whole fertilizer machine.
- Microcontroller –Controller is for the run all the functioning of software in this fertilizer machine. It is compress micro computer manufactured to control the function of embedded system in machine control. It has 40 pin, 8 bit, speed of 16 MHz. We took the advance version of controller i.e., ATmegha 16.
- Relay Board – Relay board are computer board with arrays of relays and switches designed to control voltage supply. It is equipped with input and output terminals. It requires 15-20mA signal drive current.
1. Electronic Components
a. Microcontroller (ATMEGA16): Microcontrollers play an important role in the development of embedded systems. A microcontroller is a small computer on a single metal-oxide-semiconductor (MOS) integrated circuit (IC) chip. A microcontroller contains one or more CPUs (processor cores) along with memory and programmable input/output peripherals. Program memory in the form of ferroelectric RAM, NOR flash or OTP ROM is also often included on chip, as well as a small amount of RAM. Microcontrollers are designed for embedded applications, in contrast to the microprocessors used in personal computers or other general purpose applications consisting of various discrete chips. Microcontrollers are used where automation is an integral part of the system. Specification: 40 pin, 8 bit, RAM=512 kb, speed=16MHz, voltage supply=2.7V-5.5V
b. Integrated Circuit(I.C): Integrated circuit (IC) (microchip), is an assembly of electronic components, fabricated as a single unit, in which miniaturized active devices (e.g., transistors and diodes) and passive devices (e.g., capacitors and resistors) and their interconnections are built up on a thin substrate of semiconductor material (typically silicon).
Specification: 8 bit, voltage supply=4.5 to 5.25V
D. Field Trial & Testing
Completing assembly work we fabricate the fully automated robot. Then after we move towards trial field which select the farm of Waddhamna village, Amravati Road, Nagpur. In a soil of Black Loamy Sand and ambient condition. After completing the trial and testing with respect to time, ingredient and no. of crops the speed of the robot is 58 m/min of each plant at fertilizer per quantity 30 grams. So the objective of our project is successfully works.
- Working: An Automated fertilizer robot with operate with the help of all that parameter as we discuss in construction. It will move by the batteries (12v) by using motors (Q-4) and it will operate with help of Mobile applications. When it will move towards the crop hopper will release the DAP (Die Ammonium Phosphates) through the flexible pipes and move towards opening of the mechanism. At the Same time actuators with move horizontally towards crop with three different point mechanism, then that mechanism goes downward with the help of vertical movement actuator. Then once it (mechanism) goes under the land it will release the DAP, insert the ground at three different point with different layer I.e. 2inch,4inch and 6 inch at 180 degree to the crop. Then it comes back to the original position of mechanism and move towards next plant of cotton crop and it will do repeated process for plant of cotton crops.
2. Objectives
a. To Select parts & Fabricate the model using suitable manufacturing operations.
b. To make use of Advanced Technology such as Lora for functioning of the robot
c. To Test the robot in the field for its functioning
d. To reduced man power during from field activity
e. To examine the role of agriculture in economic development of Edo state
f. To suggest possible solution to the problems that have emanated.
g. To examine the role of agriculture in economic development of Vidharbha region.
h. To make appropriate recommendations to the farmers or modern use of farming techniques.
3. Benefits Of Fertirobotics
a. High speed Fertilization and Time savings.
b. Less fatigue to labor Applicable for small and medium farms.
c. Easy to operate, as no skilled operator required.
d. It increased will increases cotton production as seed can be placed uniformly in a row with required distance between plants.
e. Requirement of labor is less and Maintenance cost is low.
f. It is easy to assemble, pollution free and No electric power required.
g. Improvement in planting efficiency. Increase in crop yield and cropping reliability.
VI. FUTURE SCOPE
- Multipurpose Machine: Just by changing the mechanism one can perform other farm operations like weed cutting, pesticides spraying etc.
- Use of Al & loT Fertirobotix: It Can be fully programmed. Once it implemented on machine learning then it will automatically perform over the field it must perform its function at desired place over entire filed area.
- Further Experimentation: Fertirobotix can be tested and compared actually with traditional method of fertilization and can be checked terms of productivity output.
- Modifying Existing Fertilizing Mechanism: Current mechanism works well on sandy soil. The machine must also be tested for hard soil and partial wet soil. For this fertilizer tool can be modified and tested.
A. Advantages
- A frequent supply of nutrients reduces fluctuation of nutrient concentration in soil.
- There is efficient utilization and precise application of nutrients according to the nutritional requirements of the crop.
- Fertilizers are applied throughout the irrigated soil volume.
- Nutrients can be applied to the soil when soil or crop conditions would otherwise prohibit entry into the field with conventional equipment.
Conclusion
A framework of the fertigation management system in IoT-based smart greenhouses is developed. In this framework, two kinds of decision making are involved, long-term planning and short-term planning. These two planning have not been considered simultaneously in existing studies on fertigation systems in which only the latter was investigated.
References
[1] Patil, T., Shaikh, S., Ghuge, V., & Fuldeore, P. ( 2018). Remote Oprated Seed Sowing Machine. International Journal For Engineering Applications And Technology , 3 (11), 12-14. [2] Sadik, S. M., & Hussain, H. A. (2017). Design and Fabrication of Multipurpose Farming Machine. IJSART , 3 (9). [3] Doshi, T., Joshi, J., Vyas, R., & Upadhayay, P. (2015). Agritech Automation on Seeding and Fertigation A Revoiution in Agriculture. IJISET , 2 (11). [4] Gorane, P. S., Patil, N., Patil, S., Pawar, G., & Raut, M. (2017). DESIGN AND DEVELOPMENT OF SEED SOWING MACHINE ALONG WITH FERTILIZER SPRAYER. ICRTESM , 2 (12). [5] Hassan, M., Ullah, M., & Iqbal, J. (2016). Towards Autonomy in Agriculture: Design and Prototyping of a Robotic Vehicle with Seed Selector. IEEE , 9 (16). [6] Dr. C.N.SAKHALE, Prof. S.N.WAGHMARE, Rashmi S.Chimote (2016) MULTIPURPOSE FARM MACHINE, International Research Journal of Engineering and Technology (IRJET) Volume: 03 Issue: 09 | Sep-2016 [7] Savani, V., Mecwan, A., Patel, J., & Bhatasana, P. (2019). Design and Development of cost effective Automatic Fertilization System for Small Scale Indian Farm. International Journal of Electronics And Telecummunication 2019 , 3 (65). [8] Raut, L. P., Jaiswal, S. B., & Mohite, N. Y. (2013). Design development and Fabrication of Agricultural pesticides sprayer with weeder. IJARS , 2 (11). [9] Nagdeve, T., Dhara, S., Jangde, P., Ukani, N., Tandulakr, H., & Chakole, S. (2020). Design of Automated Seed Sowing Robot For BT Cotton Seed. IEEE. [10] Asit Dhawale , Ashutosh Gadling , Akash Jadhao , Sanket Hendve , Kirti Fadnvis (2019) Modification of Sweeper Weed Cutter Machine Into Multipurpose Agriculture Machine, IJSART - Volume 5 Issue 2 –FEBRUARY 2019
Copyright
Copyright © 2022 Ms. Saniya Lade, Ms. Prachi Lade, Ms. Divya Chandiwale, Mr. Ankit Barodkar, Mr. Dinesh Ghate, Mr. Grishal Gaydhane, Prof. S. S. Ghosh. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45619
Publish Date : 2022-07-14
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online