

Ijraset Journal For Research in Applied Science and Engineering Technology
Multi-Functional Agribot
Authors: Druva Kumar S, Vanishree GB, S. Sai Dhanush, Sharanya S, Shahsidhar T
DOI Link: https://doi.org/10.22214/ijraset.2022.43646
Certificate: View Certificate
Abstract
This project aims to design an agricultural robot to perform operations such as plowing, seeding, leveling, pesticide spraying, and plant health monitoring. The proposed Agribot is built by using the Raspberry Pi microcontroller. The microcontroller, the heart of the robotic system can manipulate the whole actions of the system. A motor driving circuit is used to drive the DC motors which in turn control the wheel motion. The Raspberry pi is given with a high-tech web camera for capturing the image, since the resolution of the given Raspberry pi camera is not sufficient to get the clarity image, Wi-Fi is used for the manual control of the robot. The Agribot is powered using a 12V battery. This 12V is used for the functioning of all other components like Relay, Motors, and Motor Drivers.
Introduction
I. INTRODUCTION
Machine Learning and Artificial intelligence are enormous technologies that play a major role in moving the world into a modern era. Researchers have designed much equipment for the traditional farming approach but robotics technology could also be implemented in agriculture which can substitute human labor in a few aspects and eventually improve the agricultural sector more efficiently than the present. The lifetime of robot systems is prone to variations throughout agricultural environments. For instance, weeds, diseases, pests, climatic changes, also advancements in robotic technology. The usage of a robot in the agricultural field can benefit the farmers during the initial stages of agriculture like plowing, seeding, and leveling. Once the crop is grown, we can monitor the health of the crop and appropriately spray a pesticide if any disease related to insects is detected. The proposed Agri bot is a prototype but it can be implemented on a large scale which can benefit the farmers. Apart from post farming operations like plant health monitoring and pesticide spraying, other farming operations such as harvesting can be implemented in a robot which eventually can make a robot perform multi-tasking.
II. LITERATURE SURVEY
The idea of designing, developing, and implementing the proposed Agri Bot started with the study of various papers.
- The paper deals with an automatic robot for agricultural purposes that goes through the crop lines of Agricultural land and performs duties that are tiresome and/or unsafe to the farmers. it had been been prepared for spraying, but other configurations are designed like seeding, a plug system to reach the foremost notable area of the plants to execute different tasks (pruning, harvesting, etc.), and a truck to maneuver the fruits, crops, and crop waste products. The wheels of this robot are designed in order that it can travel easily in soft and wet soil.
- The paper deals with developing a robot to perform various activities on the farm like cutting and picking. Image processing is used to identify grass within the sector and also the height of the crop. A container is used to position the cut grass and harvested crops. Pesticide spraying is additionally equipped within the robot.
- During this paper, a robotic vehicle performs bed preparation, seed mapping, seed placement, and reseeding operations. it's having four tires and is steered by DC motors. The device will cultivate the plantation by considering particular rows and specific columns at predetermined distances hoping on different seed products. The obstacle recognition is taken into consideration and sensed by an infrared sensor. the entire assemblage is driven by a 12V rechargeable battery pack. The battery pack is recharged by using energy which is additionally attached to the robot.
- The paper deals with a robot within which the steering operation is finished by employing a rack and pinion mechanism. The relay switch regulates the power input for the motor. Obstacle detection is finished using an IR sensor.
- During this paper, the robot is capable of completing procedures like programmed seeding, irrigation, and fertilization. additionally, it provides manual moreover as auto control. The seeding process is run in every row of the farming plot. within the irrigation process, the soil sensor is utilized for monitoring the condition. It checks the number and alerts the farmer then gradually applies a touch bit of water to the planted seed in every row of the farming plot.
- This paper deals with a bot using the firebird V automatic robot. The Firebird V robot uses ATMEGA 2560 as a master controller, ATMEGA 8 because the master controller, IR, gripper design, and other accessories. the automated robot picks up the planting area by using detectors and seed products to be planted within the related field using the gripper found within the automated robot.
III. SYSTEM ARCHITECTRE
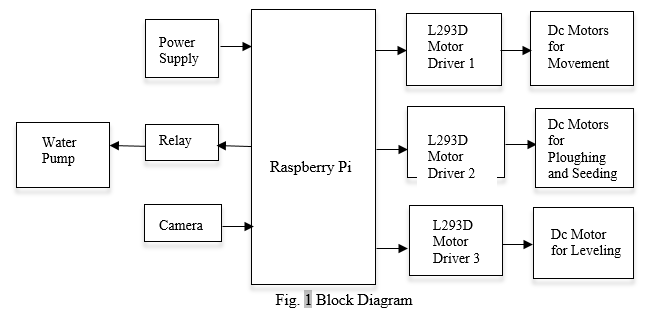
The above figure is the block diagram of the proposed AgriBot. The Raspberry pi is the microcontroller used in this project. It monitors and controls all the operations of the bot. Since the resolution of the camera embedded in the Raspberry pi is not sufficient to get a clear image, a web camera is connected to the Raspberry pi for capturing the image of the leaves. Wi-Fi is used for the manual control of the robot. The Raspberry pi is powered using the power bank. The robot is powered using a 12V battery. This 12V is used for the functioning of all other components like Relay, Motors, and Motor Drivers. The bot is made to perform the plowing, seeding, leveling, pesticide spraying, and plant health monitoring.
IV. METHODOLOGY
The Raspberry pi plays a key role in monitoring the Agribot. It contains a set of GPIO pins that can be used to control the electronic components by connecting to it. The L293D motor driver 1 is connected to Raspberry pi which is used for controlling the direction and movement of 2 DC Motors. The motor driver also works as a step-up transformer to give sufficient power supply to motors. The L293D motor driver 2 is used for controlling the motors, which are used for plowing and seeding. The L293D motor driver 3 is connected to the dc motor for leveling operation. For plowing an instrument that is capable to dig is connected to the motor and for seeding, a seed dispenser is connected. The leveler will level the ground once the plowing and seeding operations are done. A Relay Module is used which acts as a switch between the pi board and the water pump. Whenever there is a command for spraying the pesticide, the relay switches ON the water pump. The water container is also used as a pesticide container through which the pesticide is sprayed. A Web camera is used which captured the image of leaves, processes it, and produces the output if the leaves are healthy or diseased. If diseased, it will show the disease name as well and give the command to relay whether to spray the pesticide or fertilizer.
V. IMPLEMENTATION
A. Hardware
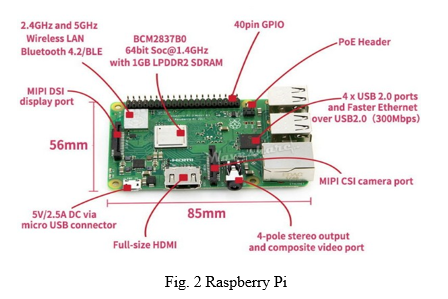
- Raspberry Pi: The Raspberry Pi microcontroller enables to explore computing and learn programming in languages like Scratch and Python. It’s capable of doing everything from browsing the internet and playing high-definition video, to making spreadsheets, word-processing, and playing games. The processor is a 1.4GHz 64-bit quad-core ARM Cortex-A53 CPU with 1GB LPDDR2 SDRAM. It has 4 USB 2.0 ports and 40 GPIO pins with the operating system of Linux and Unix. It requires an input power of 5V DC. It supports Dual-band 802.11ac wireless LAN (2.4GHz and 5GHz) and Bluetooth 4.2 Low Energy. It has a dual-band wireless LAN chip, 2.4Ghz and 5Ghz with embedded antenna
2. L293D Motor Driver: The Microcontrollers aren't compatible with motors directly. So, an interfacing device between the motor and microcontroller is required, so speed and direction of the motors may be controlled. This interfacing device is thought as a motor driver. L293D is one such motor driver. The L293d bridge is controlled by external low voltage signals. it's small in size, but its power output capacity is high. It can control any DC motor speed and direction with a voltage range of 4.5 – 36 Volts. The motor includes a maximum continuous range of current near 600mA but the utmost peak current range is 1.2A It has an automatic shutdown system on thermal conditions. Its working range is from 0 – 70 degrees which is far higher for any small-sized IC. it's an enclosed back emp protection for IC and therefore the controlling device.

3. Relay Module: The relay is an electro-mechanical device that acts as a switch. DC electrical current is employed to energise the relay coil which opens or closes the contact switches. the interior circuit of one channel 5V relay consists of normally open contacts, normally closed contacts, and a coil. The relay module consists of six pins like normally open pin, normally closed, common, signal, Vcc, and ground pins. The components are a 5V Relay, Transistor, Diode, LEDs, Resistors, Male Header pins, 3-pin screw-type terminal connector, etc. The relay coil is activated at a 5V minimum any voltage not up to this may not be able to reliably close the contacts of the relay. The relay can switch a maximum load of 7A when connected to a 250V mains circuit. The relay can transfer up to 10A DC current before the contacts fail.

4. DC Motor: DC Motor is an electronic device that runs on a direct current. A DC Motor provides a means to convert between two forms of energy – electrical to mechanical. DC Motors are used in vehicles to enable movement. The main advantage of using DC Motors is that they provide speed and direction control mechanisms. A 30 RPM 12V DC geared motor is widely used for robotics applications. These motors have a 3 mm threaded drill hole in the middle of the shaft thus making it simple to connect it to the wheels or any other mechanical assembly. The Shaft diameter is 6mm with an internal hole and has 2kg-cm Torque.

5. Lead Acid Battery: Lead-acid batteries are rechargeable batteries consisting of lead plates with a sulfuric acid/water electrolyte solution. Car batteries and deep cycle batteries use lead-acid technology. A lead-acid battery's nominal voltage is 2V for each cell. For a single cell, the voltage can range from 1.8V loaded at full discharge, to 2.10 V in an open circuit at full charge.
B. Software
In the proposed AgriBot, the image processing is completed by dividing the image into three shader channels, red, green, and blue. Each of those shader channels is mapped to pixels within the image. the pc then recognizes the worth related to each pixel and determines the scale of the image.
Convolutional neural networks
Convolutional neural networks are composed of neurons with learned weights and biases. Each neuron takes multiple inputs, sums the weights on them, passes them through an activation function, and responds with an output. It consists of a network of learning units called neurons. These neurons find out how to convert input signals into corresponding output signals, forming the premise of automated recognition.
There are three layers in Convolutional Neural Networks:
- Convolutional Layer: The convolutional layer is that the main layer of a convolutional network. The feature detector may be a two-dimensional (2-D) array of weights, which represents a part of the image. While they will vary in size, the filter size is often a 3x3 matrix; this also determines the scale of the receptive field. The filter is then applied to a vicinity of the image, and a real is calculated between the input pixels and therefore the filter. This scalar product is then fed into an output array. The filter shifts by a stride, repeating the method until the kernel has swept across the whole image. the ultimate output from the series of dot products from the input and also the filter is understood as a feature map, activation map, or a convolved feature.
- Pooling Layer: during this layer, a grouping of layers, also called downsampling helps to cut back the dimensions thus reducing the amount of parameters within the input. almost like the convolutional layer, the group operation scans a filter over the complete input but the difference is that the filter has no weight. Instead, the kernel applies an aggregate function to the values ??in the receiving field, filling the output array to send to the output table.
- Fully Connected Layer: Within the fully connected layer, each node within the output layer connects on to a node within the previous layer. This layer performs the classification task supported the features extracted through the previous layers.FC layers often use a SoftMax activation function to appropriately classify the input, producing a probability between 0 and 1.
VI. ALGORITHM AND FLOWCHART
A. Algorithm
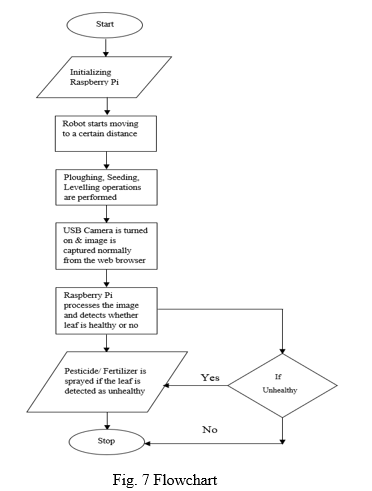
- Step 1: Initializing Raspberry Pi.
- Step 2: The robot starts moving to a certain distance.
- Step 3: Ploughing, Seeding, and Levelling operations are performed.
- Step 4: The USB Camera is turned on and the image is captured normally from the web browser.
- Step 5: The microcontroller processes the image.
- Step 6: If the image is detected as unhealthy the pesticide is sprayed else the system stops.
B. Flowchart
VII. RESULTS
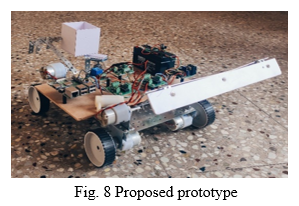
The result of this paper is shown in the below figure.
The constructed bot can perform the functions like digging, seed sowing, leveling, and pesticide spraying when it detects the diseased leaves. With the help of a camera, the bot will capture the image of leaves. Then process it, to get a clear picture and compares the real-time image with a trained image. If the compared image matches diseased leaves, the pesticide pump will be turned on and sprayed.
Conclusion
Nowadays the amount of robots in agricultural fields is increasing with different versions. Hence a Wifi-operated agricultural robot that may perform plowing, seeding, leveling and plant health monitoring is developed. Therefore, with the assistance of the Agri bot farmers can do other activities together with controlling the robot. Crop production will be done better and cheaper with the assistance of small machines than with some large ones. one amongst the benefits of the smaller machines is that they\'ll be more acceptable to the non-farm community.
References
[1] Vishnu Prakash K, Sathish Kumar V, Venkatesh P, Chandran A, “Design and fabrication of multipurpose agricultural robot”, International Journal of Advanced Science and Engineering Research, Volume: 1, Issue: 1, June 2016, ISSN: 2455 9288. [2] Ankit Singh, Abhishek Gupta, Akash Bhosale, Sumeet Poddar, “Agribot: An Agriculture Robot”, International Journal of Advanced Research in Computer and Communication Engineering Vol. 4, Issue 1, January 2015 ISSN (Online): 22781021 ISSN (Print): 2319-5940. [3] Mr.Sagar R. Chavan, Prof. Rahul D. Shelke, Prof. Shrinivas R. Zanwar, “Enhanced agriculture robotic system”, International journal of engineering sciences & research technology, ISSN: 2277-9655. [4] Nithin P V, Shivaprakash S, “Multipurpose agricultural robot”, International Journal of Engineering Research, ISSN: 2319- 6890)(online),2347-5013(print) Volume No.5 Issue: Special 6, pp: 1129 - 1254. [5] Ms. Aditi D. Kokate, Prof. Priyanka D.Yadav, “Multipurpose Agricultural Robot”, International Advanced Research Journal in Science, Engineering and Technology National Conference on Emerging trends in Electronics & Telecommunication Engineering (NCETETE 2017), ISSN (Online) 2393-8021 ISSN (Print) 2394- 1588. [6] L.Manivannan, M.S.Priyadharshini, “Agricultural Robot”, International Journal of Advanced Research in Electrical, Electronics and Instrumentation, Volume 5, Special Issue 1, March 2016, ISSN (Print) : 2320 – 3765, ISSN (Online): 2278 – 8875.
Copyright
Copyright © 2022 Druva Kumar S, Vanishree GB, S. Sai Dhanush, Sharanya S, Shahsidhar T. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43646
Publish Date : 2022-05-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online