

Ijraset Journal For Research in Applied Science and Engineering Technology
Novel Pollination Drone for Agricultural Assistance
Authors: Arun Sekar R , Dhineshkumar G, Divakar Prabhu B
DOI Link: https://doi.org/10.22214/ijraset.2022.44596
Certificate: View Certificate
Abstract
One of the major issues concerning current agricultural production is crop pollination. Approximately $74 billion per year worth of crops in rely on pollination by various pollinators. However, the recent decline of honey bees (i.e. colony collapse disorder) has greatly threatened productivity. Declines of other native pollinators, such as different insect types and animals, have also been reported. Such shortages of pollinators have significantly increased the cost of farmers and renting them for pollination services. To overcome this problem, this project presents an automated drone for pollination which uses deeplearning and machine learning algorithms to estimate the flower position, size, orientation, and physical condition to guide the drone to capture and interact with flowers for pollination. In this concept we use drone and artificial intelligence method to carry pre collected pollen and to inject them in flowers for pollination to increase productivity. Drone pollination bypasses many current issues with natural pollinators inagriculture, such as honeybee colony collapse disorder, pollinator parasites and diseases, predators, pesticide spray, adverse weather, and the availability of pollinators in a timely manner. Second, robotic pollinators will improve fruit quality and production. With the decreasing number of bees, artificial pollination is more in trend. If we take the example of China, 100% plants are pollinated artificially. So, we can see that artificial pollination is beneficial and can increase plant productivity. The successful completion of this project will significantly impact the field of artificial pollination in agriculture.
Introduction
I. INTRODUCTION
A. General
Pollination is a familiar term to almost everyone. We understand that flowers must be pollinated, usually by various insects, for the plant to create fruits and seeds. We have seen headlines asserting that insect pollinator populations are declining, threatening those essential processes.
We know that pollen is that yellow dust that covers our cars in early spring, and we blame it for our seasonal allergies. For many of us, that’s about as far as it goes. But taking the time to look deeper can lead to some amazing discoveries. Individual plants have developed their own, often unique and highly specialized structures and pollination techniques over millions of years.
Plant-pollinator interdependence has evolved to become the central facilitator of both plant reproduction and pollinator nutrition. A thoughtful look at this adds clarity to why maintaining biodiversity is so important to the health of the earth and its people. So let’s take a brief, and hopefully insightful, look at the fundamentals. Pollination is the reproduction system used by flowering plants. Specifically, it is the act of transferring pollen from themale “anther” to the female “stigma” of a flower to make seeds and enable reproduction.
Pollen are fine dust-like particles that develop within the anther and collect on its surface. Pollen grains are unique in their shape and the sculpturing of their tough exterior surfaces. For successful pollination, the pollen must be transported to a stigma of the same plant species atthe right time. When pollen lands on a receptive stigma, one of the pollen grain’s two internal cells germinates and creates a pollen tube, essentially a tunnel through the stigma and style, forming a path to an ovule inside the flower’s ovary.
The second cell in the pollen grain divides into two sperm cells which travel down the pollen tube to the ovule. One sperm cell unites with the egg, creating the embryo, and ultimately, a seed. The other unites with a cell in the ovule to create endosperm, which provides nutrients for the embryo and in some cases for the seed’s early growth. Ovaries may have one or many ovules. Only fertilized ovules develop into seeds. If all the ovules aren’t fertilized by individual pollen grains, fewer seeds develop and the resulting “fruit” is likely to be oddly- shaped.
The realization that the seeded fruit and vegetables we eat are actually plant ovaries may be slightly off-putting, but is an interesting fact nonetheless. Cross- pollination is predominant. There are benefits to variation in helping plants adapt in a changing environment. Flowers prevent accidental self- pollination in several ways, including varying thetiming of pollen release and stigma receptivity, the spatial arrangements of anthers and stigmas, and by separating male and female flowers on the same plants
B. Embedded System
As its name suggests, Embedded means something that is attached to another thing. An embedded system can be thought of as a computer hardware system having software embedded in it. An embedded system can be an independent system or it can be a part of a large system. An embedded system is a microcontroller or microprocessor-based system which is designed to perform a specific task. For example, a fire alarm is an embedded system; it will sense only smoke.
In this project embedded system technology is been utilized. As embedded system is a combination of hardware and software, the board which is inbuilt in drone is a combination of hardware which includes the pcb board design, component integration and a software by whichthe board communicates with the nearby pc to receive instructions and act accordingly
C. Organization of The Thesis
The report is summarized as follows:
- Chapter 1 describes an introduction and the purpose of the project.
- Chapter 2 deals with literature survey
- Chapter 3 deals with existing methods and proposed methods.
- Chapter 4 explains in depth the actual working of the project.
- Chapter 5 ends with the conclusion and future enhancement ideas
II. LITERATURE SURVEY
TITLE: Towards Computer Vision and Deep Learning Facilitated Pollination Monitoring forAgriculture
AUTHORS: Malika Nisal Ratnayake, Adrian G.Dyer, Alan Dorin
YEAR: 2021
Globally, pollinators affect 35% of agricultural land and play a key role in food production. Consequently, monitoring is useful to understand the contribution insects make towards crop pollination. Traditional sampling techniques used in insect monitoring have several drawbacks, including that they are labour intensive and potentially unreliable. Some of these drawbacks may be overcome using computer vision and deeplearning-based approaches to automate pollination monitoring. computer vision-based pollination monitoring and propose a novel algorithm, Polytrack, that tracks multiple insects simultaneously in complex agricultural environments. They algorithm uses deep learning and foreground/background segmentation to detect and track insects. Polytrack includes a flower identification module to automate collection of insect-flower interaction data, and a low-resolution processing mode that reduces computational demands placed on theprocessor to bring the software towards the requirements of low powered monitoring hardware.
TITLE: Intelligent Autonomous Pollination for Future Farming
AUTHORS: Yi Cheni, Yun LI1
YEAR: 2019
Food security is one of the societal challenge topics. As one-third of all food consumed by humans relies on animal pollination currently, this research provides an emerging solution to food supply reduction caused by populationshrinking of natural pollinators, so as to reduce its impact on ecological relationships, ecosystem conservation and stability,genetic variation in the crop plant community, floral diversity,specialisation and evolution. This paper develops a conceptual technical roadmap of autonomous pollination for future farming using robotic micro air vehicle pollinators (MPrs). The research provides new insightsinto autonomous design and manufacture and into possible ways toincrease the production efficiency which shortens the time from lab to market. The autonomous MPrs are realized using artificial intelligence and human expertise in the loop for smart agricultural industry. Further, this work identifies scientific and technological advances that are expected to translate, within proposed regulatory frameworks, into the pervasive use of MPrs for agricultural applications and beyond.
TITLE: Visual tracking based on flower pollination algorithm
AUTHORS: Ming -Liang Gao, Yuan-Ru Zang, Jin Shen, Yu-Chen Zhang
YEAR: 2016
Flower pollination algorithm (FPA) is a new meta-heuristic optimization algorithm that mimics the real life processes of the flower pollination. In this study, visual tracking is regard as a process of optimal reproduction of flowering plants. An FPA-based tracking architecture is proposed and its tracking accuracy and speed are compared with particle filter and mean shift. Comparative results indicate that the other two trackers.
TITLE: Task Scheduling in Cloud Computing using Various Techniques
AUTHORS: Jaspinder Kaur, Brahmaleen Kaur, Sidhu
YEAR: 2019
Cloud Computing is in demand now a days as it providesreliable, scalable and economical IT operations. As the scale of thecloud computing is increasing the need of an efficient scheduling algorithm for an effecting management of resources is also becoming crucial.
Scheduling problem in cloud is NP-hard problem. Meta- heuristic approaches have been very useful in providing near optimal solution to the scheduling problem. In this paper a new approach for Task Scheduling using Flower Pollination Algorithm (TSFPA) has been introduced to allocate resources to task.
The objective of this proposed algorithm is to minimize the makespan. The performance of the proposed algorithm has been compared with genetic algorithm (GA), first come first serve (FCFS) and round robin (RR) approach of scheduling using Cloudsim toolkit. Simulation results showed that performance of TSFPA is better than GA,RR and FCFS in terms of makespan.
Title: Attentive Layer Separation for Object Classification and object Localization in object detection
AUTHORS: Jung UK Kim, Yong Man Ro
YEAR: 2019
Object detection became one of the major fields in computer vision. In object detection, object classification and object localization tasks are conducted. Previous deep learning based object detection networks perform with feature maps generated by completely shared networks.
However, object classification focuses on the most discriminative object part of the feature map. Whereas, object localization requires a feature map that is focused on the entire area of the object. In this paper, we propose a novel object detection network by considering the difference between the two tasks.
The proposed deep learning-based network mainly consists of two parts; 1) Attention network part where task-specific attention maps are generated, 2) Layer separation part where layers for estimating two tasks are separated. Comprehensive experimental results based on PASCAL VOC dataset and MS COCO dataset showed that proposed object detection network outperformed the state-of-the-art methods.
TITLE: Multi-Drone 3D Trajectory Planning and Scheduling in Drone Assisted Radio Access Networks
AUTHORS: Weisen Shi, Junling Li, Nan Cheng, Shan Zhang, Haibo Zhou
YEAR: 2019
3D trajectories of multiple DBSs in the drone assisted radio access networks (DARAN) where DBSs ?yover associate dare as of interests (AoIs) and relay communications between the base station (BS) and users in AoIs. Formulate the multi-DBS 3D trajectory planning and scheduling as a mixed integer non-linear programming (MINLP) problem with the objective of minimizing the average DBS-to-user (D2U) pathloss. The 3D trajectory variations in both horizontal and vertical directions, as well as the stateof-the-art DBS-related channel models are considered in the formulation. To address the non-convexity and NP- hardness of the MINLP problem, Decouple it into multipleinteger linear programming (ILP) and quasi-convex sub-problems in which AoI association, D2U communication scheduling, horizontal trajectories and ?ying heights of DBSs are respectively optimized. Then,Multi-DBS 3D trajectory planning and scheduling algorithm to solve thesub-problems iteratively based on the block coordinate descent (BCD) method. A k- means based initial trajectory generation and a search- based start slot scheduling are considered in the proposed algorithm to improve trajectory design performance and ensure inter-DBS distance constraint, respectively.
TITLE: A Self-Adaptive Forensic-Read Service for Drones
AUTHORS: Yijun, Danny Barthaud1, Blaine A
YEAR: 2019
A self-adaptive software architecture, LiveBox, to make drones both forensic-ready and regulation compliant. Studied the feasibility of using distributed technologies for implementing the LiveBox reference architecture. In particular, Updates and queries of drone ?ight data and constraints can be treated as transactions using decentralised ledger technology (DLT), rather than a generic time-series database, to satisfy forensic tamper-proof requirements. However, DLTs such as Ethereum, have limits on throughput (i.e. transactions-per-second), making it harder to achieve regulation-compliance at runtime.
TITLE: Drone Racing: From Simulation to Reality With Domain Randomization
AUTHORS: Antonio loquercio, Elia Kaufmann, Rene Ranftl, Alexey Dosovitskiy
YEAR: 2019
We address these challenges in the context of autonomous, vision-based drone racing in dynamic environments. A racing drone must traverse a track with possibly moving gates at high speed. We enable this functionality by combining the performance of a state-of-the- art planning and control system with the perceptual awareness of a convolutional neural network. The resulting modular system is both platform independent and domain independent: it is trained in simulation and deployed on a physical quadrotor without any ?ne- tuning. The abundance of simulated data, generated via domain randomization, makes our system robust to changes of illumination and gate appearance. To the best of our knowledge, our approach is the ?rst to demonstrate zero-shot sim-to-real transfer on the task of agile drone ?ight. The precision and robustness of our system, both in simulationand on a physical platform, and show signi?cant improvements over the state of the art.
TITLE: Fast Depth Prediction and Obstacle Avoidance on a Monocular Drone Using Probabilistic Convolutional Neural Network
AUTHORS: Xin Yang, Jingyu Chen, Yuanjie Dang
YEAR: 2019
A real-time onboard approach for monocular depth prediction and obstacle avoidance with a lightweight probabilistic CNN (pCNN), which will be ideal for use in a lightweight energy-ef?cient drone. For each video frame, our pCNN can ef?ciently predict its depth map and the corresponding con?dence. The accuracy of our lightweight pCNN is greatly boosted by integrating sparse depth estimation from a visual odometry into the network for guiding dense depth and con?dence inference. The estimated depth map is transformed into Ego Dynamic Space (EDS) by embedding both dynamic motion constraints of a drone and the con?dence values into the spatial depth map. Traversable waypoints are automatically computed in EDS based on which appropriate control inputs for the drone are produced. Extensive experimental results on public datasets demonstrate that our depth prediction method runs at 12Hz and 45Hz on TX2 and 1050Ti GPU respectively, which is 1.8X∼5.6X faster than the state-of-the-art methods and achieves better depth estimation accuracy.
TITLE: A Cost-effective Crowdsensing System for Detecting and Localizing Drone
AUTHORS: Guang Yang, Xiufang Shi, Li Feng, Shibo He, Zhiguo Shi
YEAR: 2019
A cost-effective crowd sensing system named CEDAR to achieve such a goal. Specifically, Introduced a novel way of detecting drones by smartphones, exploiting the fact that most drones adopt Wi-Fi for communications with ground control stations. We design an efficient detection algorithm that takes advantage of historical Wi-Fi beacon information and MAC address encoding mechanisms used by drone manufacturers. Using received signal strength, we can also localize the detected drones. Further, to encourage participants involvement, we design an incentive mechanism based on online auction that guarantees truthfulness and consumer sovereignty. CEDAR can be directly applied to multiple drones…
III. PROPOSED SYSTEM
???????A. Existing System
Globally, pollinators affect 35% of agricultural land and play a key role in food production. Consequently, monitoring is useful to understand the contribution insects make towards crop pollination. Traditional sampling techniques used in insect monitoring have several drawbacks, including that they are labour intensive and potentially unreliable. Some of these drawbacks may be overcome using air vehicle, computer vision and deep learning-based approaches to automate pollination. A pipeline for computer vision-based pollination monitoring and propose a novel algorithm, Polytrack, that tracks multiple insects simultaneously in complex agricultural environments. Algorithm uses deep learning and foreground/ background segmentation to detect and track insects has achieved precision and recall at a good rate. Respectively when monitoring honeybees foraging in our test sites within the polytunnels of an industrial strawberry farm. Polytrack includes a flower identification module to automate collection of insect- flower interaction data, and a low-resolution processing mode that reduces computational demands placed on the processor to bring the software towards the requirements of low-powered monitoring hardware.
- Disadvantages of Existing System
a. Accuracy is less.
b. No real time implementation is done.
c. The scheduling algorithm is complex difficult to implement.
???????B. Proposed System
One of the major issues concerning current agricultural production is crop pollination. Approximately $74 billion per year worth of crops in rely on pollination by various pollinators. However, the recent decline of honey bees (i.e. colony collapse disorder) has greatly threatened productivity. Declines of other native pollinators, such as different insect types and animals, have also been reported. Such shortages of pollinators have significantly increased the cost of farmers and renting them for pollination services. From both economic and food sustainability points of view, there is an urgent need to seek alternative pollination systems. Globally, pollinators affect 35% of agricultural land and play a key role in food production. Consequently, monitoring is useful to understand the contribution insects make towards crop pollination. Traditional sampling techniques used in insect monitoring have several drawbacks, including that they are labour intensive and potentially unreliable. Some of these drawbacks may be overcome usingair vehicle, computer vision and deep learning-based approaches to automate pollination.
To overcome this problem this project presents an automated drone for pollination which uses deep learning and machine learning algorithms to estimate the flower position, size, orientation, and physical condition to guide the drone to capture and interact with flowers for pollination. In this concept we use drone and artificial intelligence method to carry pre collected pollen and to inject them in flowers for pollination to increase productivity. Drone pollination bypasses many current issues with natural pollinators in agriculture, such as honeybee colony collapse disorder, pollinator parasites and diseases, predators, pesticide spray, adverse weather, and the availability of pollinators in a timely manner. Second, robotic pollinators will improve fruit quality and production. With the decreasing number of bees, artificial pollination is more in trend. If we take the example of China, 100% plants are pollinated artificially. So, we can see that artificial pollination is beneficial and can increase plant productivity. The successful completion of this project will significantly impact the field of artificial pollination in agriculture.
- Advantages of Proposed System
a. An automatic pollination drone is developed
b. Increases productivity.
c. Increases the flowers natural pollinating process.
???????C. Applications
- Flower pollination.
- Farmer assistance.
???????D. Block Diagram
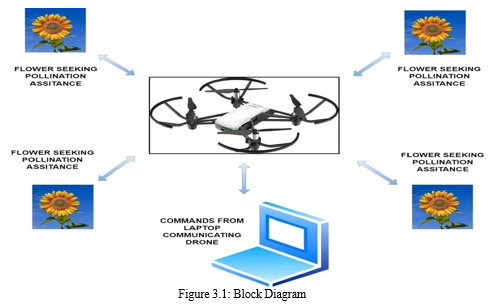
???????E. Working
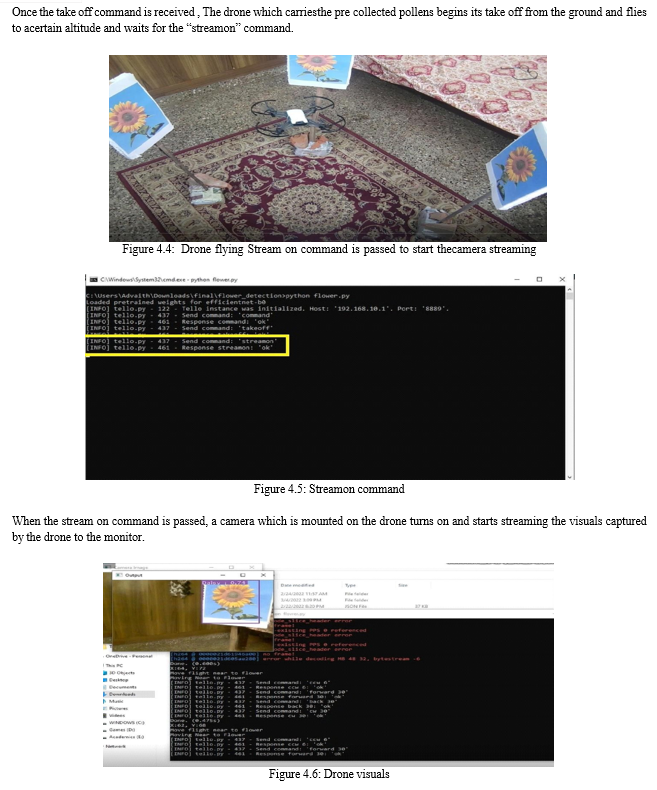
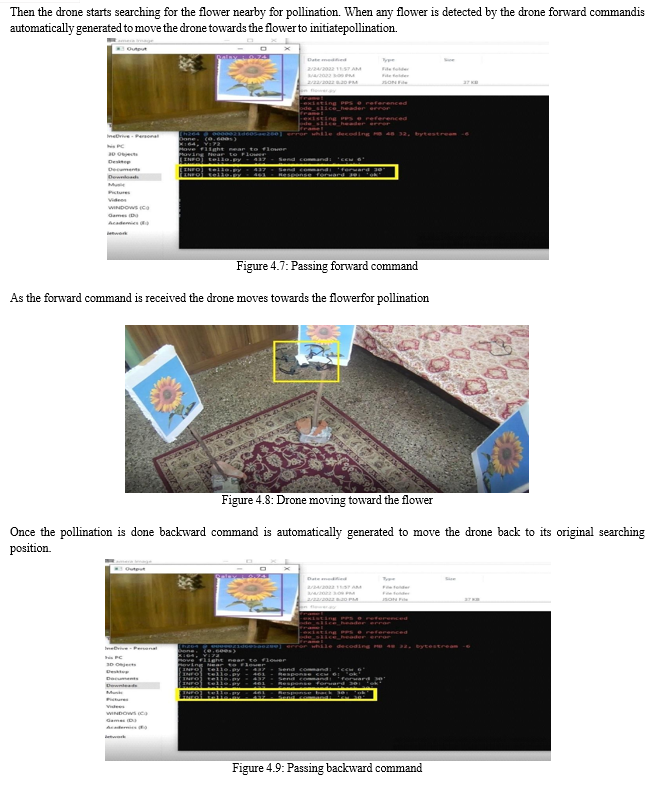
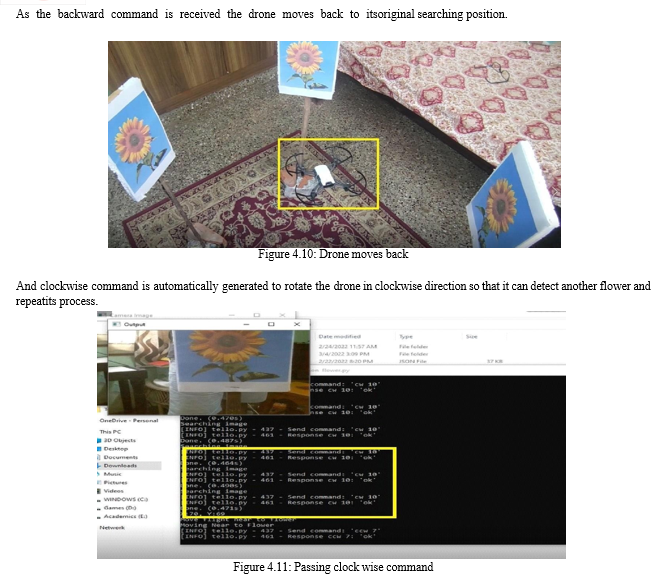
The drone consists of four BLDC motors fixed on each flying arms. The transmitter gives the command to the receiver board fixed on the drone. As the drone receives the command it acts accordingly to fly in particular direction. Once the takeoff command is received, The drone which carries the pre collected pollens begins its take off from the ground and flies to a certain altitude and waits for the “stream on” command. When the stream on command is passed, a camera which is mounted on the drone turns on and starts streaming the visuals captured by the drone to the monitor. These visuals can be used to monitor the movement of the drone and through which we can analyze the drone’s performance and update if needed. Then the drone starts searching for the flower nearby for pollination. When any flower is detected by the drone forward command is automatically generated to move the drone towards the flower to initiate pollination. Once the pollination is done backward command is automatically generated to move the drone back to its original searching position. And clockwise command is automatically generated to rotate the drone in clockwise direction so thatit can detect another flower and repeat its process . Through which artificial pollination is achieved successfully. The drone flies according to the speed given to the motors fixed on each arm of it. When the speedgiven to all the motors are increased from lower pwm voltage to higher pwm voltage, then the drone moves upwards, whereas when the pwm voltage is decreased from higher voltage to lower voltage, the drone comes down to the ground. In order to move left and right, the left motors should be slowed down whereas the right motors should be increased in speed and the same goes for the right side, such that motors in the right should be slowed down and the left motors should be given more speed. So, we can see that artificial pollination is beneficial and can increase plant productivity. The successful completion of this project will significantly impact the field of artificial pollination inagriculture.
???????F. Hardware Description
- BLDC Motor: Brushless DC motors (BLDC) have been a much focused area for numerous motor manufacturers as these motors are increasingly the preferred choice in many applications, especially in the field of motor control technology. BLDC motors are superior to brushed DC motors in many ways, such as ability to operate at high speeds, high efficiency, and better heat dissipation. They are an indispensable part of modern drive technology, most commonly employed for actuating drives, machine tools, electric propulsion, robotics, computer peripherals and also for electrical power generation. With the development of sensorless technology besides digital control, these motors become so effective in terms of total system cost, size and reliability.

2. Battery: The SkyCell Lithium-Polymer (Li-Po) Battery for robotic applications. It can give great instantaneous discharge current upto 45A. Very light weight and small size compared to Ni-Cd, Ni-MH and Lead acid batteries. Very long life without loosing charging capacity. Weights just 120 gm. SkyCell Li-Po batteries are very sensitive and can get damaged easily and permanently if not used properly. Charging batteries with non standard chargers will ensure reduction in battery life and efficiency. We strongly recommend to charge battery with our chargers or only standard chargers designed to charge Li-Ion batteries. If the batteries are drained beyond their discharge capacity they will get heated and will get damaged permanently. Each battery is rated for discharge current. If the battery is rated at 2000mAH, 2C it means that it can discharge 4 Ampere (2000ma x 2) current at max. If the load is above4A the battery will heat up and loose its efficiency to store charge over a period. Over discharging of battery may also create problem. If the voltage of battery reduces to 3.5V per cell (i.e.10.5V or below for 12.4V battery) the battery is considered discharged.
Figure 3.3: Battery
???????3. Propeller: FPV Drone Propellers are the key component that keeps your multirotor in the air, they have the most direct impact on how your machine flies, and over the lifetime of your multirotor they are likely to add up to be the biggest investment that you make to keep flying. They are also going to be the component that is damaged and replaced the most often. Taking time to choose the right propeller for your multirotor, and how you want to fly, will allow you to get the best out ofyour machine. There are 5 main variables that need to be considered when choosing a multirotor propeller:
a. Size
b. Pitch
c. Blade Configuration
d. Material (Durability)
e. Design (Efficiency)

4. Fly Sky Transmitter: This is the FlySky FS-i6 2.4G 6CH PPM RC Transmitter With FS-iA6B Receiver. This is a great entry-level radio for those just starting in the field of drones flying due to the ease of use of this product and an impressive list of features for a first-time radio. FlySky FS-i6 2.4G 6CH PPM RC Transmitter is a 6-channel telemetry 2.4GHz transmitter that uses the reliable Automatic Hopping Digital System (AFHDS) and includes such features as digital trims, backlit LCD screen, and simple programming.On top of this, you get a slim, modern radio transmitter that fits nicely in your hands and weighs just under 400g and so won’t test your arm stamina on those long flights. This radio is also really practical with a 3-position switch as well as two adjustable knobs for flight modes/ multiple flap positions.

5. Camera: This 5MP 1080P Camera is a custom designed add-on for Raspberry Pi. It attaches to Raspberry Pi by way of one of the small sockets on the board upper surface. This uses the dedicated Raspberry Pi’s onboard CSI interface, designed especially for interfacing with cameras. The camera supports night vision. It is compatible with all revisions of the Pi. Powered with a 5-megapixel OV5647 sensor, its best resolution is 1080p. The Externally attachable IR LED that helps the night vision function. The Mounting Holes Provides 3.3V power output Supports connecting infrared LED and/or fill flash LED. An adjustable resistor is provided on it to control the ambient light threshold of toggling the infrared LED when ambient light is lower than the threshold value, the infrared LED is on, vice versa. Onboard screw holesare used for both attachment and power supply.It connects to Raspberry Pi by way of a short ribbon cable. The sensor itself has a native resolution of 5 megapixels and has a fixed focus lens. In terms of still images, the camera is capable of 2592 x 1944 pixel static images, and also supports 1080p 30, 720p 60 and 640x480p 60/90 video.The camera is supported in the latest version of Raspbian, Raspberry Pi’s preferred operating system.
???????G. Software Description
The purpose of the Software Requirement Specification is to produce the specification of the analysis task and also to establish complete information about the requirement, behavior and also the other constraint like functional performance and so on. The main aim of the Software Requirement Specification is to completely specify the technical requirements for the software product in a concise and in unambiguous manner.
- Google Colab: In this project, google colab is used as an open-source IDE.Google Colaboratory is a free online cloud-based Jupyter notebook environment that allows us to train our machine learning and deeplearning models CPUs, GPUs, and TPUs. It gives us a decent GPU for free, which we can continuously run for 12 hours. For most data science folks, this is sufficient to meet their computation needs.
Google Colab gives us three types of runtime for our notebooks: CPUs, GPUs, and TPUs
Colab gives us 12 hours of continuous execution time. After that, the whole virtual machine is cleared and we have to start again. Wecan run multiple CPU, GPU, and TPU instances simultaneously, buttheir resources are shared between these instances. Colab notebooks allow us to combine executable code and rich text in a single document, along with images, HTML, LaTeX and more. When we create our own Colab notebooks, they are stored in our Google Drive account. We can easily share our Colab notebooks with co-workers or friends, allowing them to comment on our notebooks or even edit them. To learn more,see Overview of Colab.
IV. RESULTS AND DISCUSSION
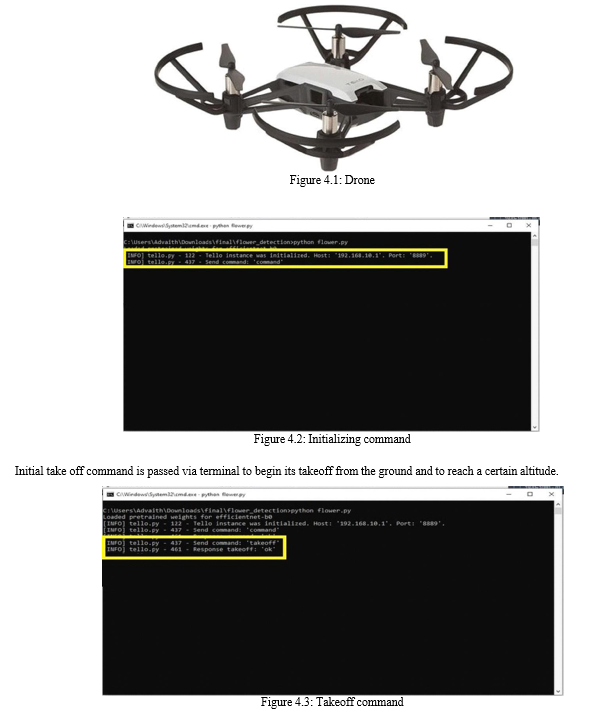
???????A. Results Obtained
The below figure shows, Drone loaded with pre collected pollens for pollination Initializing the drone to receive commends further
 ???????
???????
Conclusion
This project has designed a pollination drone which carries pre collected pollens for artificial pollination .If any kind of obstacle comes in front of it, it will automatically turn its path on other direction. This will help to detect the obstacle. The drone has a stable performance of flying up to 2 to 3 feet of height. Thus, by this we have successfully designed an obstacle avoidance drone for artificial pollination So, we can see that artificial pollination is beneficial and can increase plant productivity. The successful completion of this project will significantly impact the field of artificial pollination in agriculture. Future Scope In the coming future, we review the application of the drone technology. It can promote for advance obstacle pollination drone system with more features than this system. So, there are more chance to develop or convert this project in many ways. This can be able topromote drones which will fly avoiding obstacle resulting in many real time applications in the coming future.
References
[1] Antonio Loquercio , Elia Kaufmann , René Ranftl , Alexey Dosovitskiy , Vladlen Koltun , and Davide Scaramuzza (2019)“Deep Drone Racing: From Simulation to Reality With Domain Randomization” IEEE Transactions On Robotics. [2] Guang Yang, Xiufang Shi, Li Feng, Shibo He, Zhiguo Shi,Jiming Chen(2019) “CEDAR: A Cost-effective Crowdsensing System for Detecting and Localizing Drones” IEEE Access Volume 19 . [3] Igor Bisio, Senior Member, IEEE, Chiara Garibotto, Member, IEEE, Fabio Lavagetto, Andrea Sciarrone, (2019)“Blind Detection: Advanced Techniques for WiFi-based Drone Surveillance” IEEE Access Volume 68. [4] Jaspinder Kaur Department of Computer Engineering Punjabi University, Brahmaleen Kaur Sidhu (2017) “ A new flower pollination based task scheduling algorithm in cloud environment” Conference Paper [5] Jiaming Yan , Student Member, IEEE, Zhengyu Peng , Student Member, IEEE, Hong Hong , Member, IEEE, Hui Chu , Xiaohua Zhu, Member, IEEE, and Changzhi Li , Senior Member, IEEE,(2018) “Vital-SAR-Imaging With a Drone- Based Hybrid Radar System” IEEE Transactions On MicrowaveTheory And Techniques”IEEE Access Volume 66. [6] Jung Uk Kim and Yong Man Ro (2019)“Attentive Layer Separation for Object Classification and Object Localization in Object Detection” IEEE Transactions on Image Processing (ICIP). [7] Malika Nisal Ratnayake , Adrian G. Dyer, , Alan Dorin Faculty of Information Technology,(2022) “Towards Computer Vision and Deep Learning Facilitated Pollination Monitoring for Agriculture” IEEE Transaction on Computer Vision [8] Ming-Liang Gao, Yuan-Ru Zang, Jin Shen, Yu-Chen Zhang, De- Shui(2016) “Visual tracking based on flower pollination algorithm” Chinese Control Conference (CCC) [9] Mohammad Mozaffari1, Walid Saad2, Mehdi Bennis3, and M´erouane Debbah4 “Communications and Control for Wireless Drone-Based Antenna Array”, IEEE Transactions on Communications Access Volume 67. [10] Okan Erat, Werner Alexander Isop, Denis Kalkofen and Dieter Schmalstieg,Member, IEEE(2018) “Drone-Augmented Human Vision: Exocentric Control for Drones Exploring Hidden Areas” IEEE Transactions On Visualization And Computer Graphics, Volume 24. [11] Ritu Shenoy, B. K. Keshavan (2017) “Hybrid Drone for Data Transaction” 2017 5th IEEE International Conference on Smart Energy Grid Engineering. [12] Weisen Shi, Student Member, IEEE Junling Li, Student Member, IEEE Nan Cheng, Member, IEEE Feng Lyu, Member, IEEE Shan Zhang, Member, IEEE Haibo Zhou, Senior Member,(2019) IEEE “Multi-Drone 3D Trajectory Planning and Scheduling in Drone Assisted Radio Access Networks” IEEE Transactions on Vehicular Technology volume 68. [13] Xin Yang , Member, IEEE, Jingyu Chen, Yuanjie Dang , Hongcheng Luo , Yuesheng Tang, Chunyuan Liao, Peng Chen , and Kwang-Ting Cheng (2019) IEEE “Fast Depth Prediction and Obstacle Avoidance on a Monocular Drone Using Probabilistic Convolutional Neural Network” IEEE Transactions On Intelligent Transportation Systems volume 22. [14] Yijun yu1(member, ieee), danny barthaud1, blaine a. Price1, arosha k. Bandara1, andrea zisman1,(2019)“LiveBox: A Self- Adaptive Forensic-Ready Service for Drones” IEEE Access Volume 7. [15] Yi Chen1 , (Senior Member, Ieee), Yun Li1 ,(Senior Member, IEEE) (2019) Intelligent Autonomous Pollination for Future Farming” IEEE Access Volume 7.
Copyright
Copyright © 2022 Arun Sekar R , Dhineshkumar G, Divakar Prabhu B . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44596
Publish Date : 2022-06-20
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online