

Ijraset Journal For Research in Applied Science and Engineering Technology
Obstacle Detection and Navigation for Blind Using Smart Blind Stick
Authors: Chaitanya M, G. Karthik, K. Prathyusha, K. Shiva Leela
DOI Link: https://doi.org/10.22214/ijraset.2022.42901
Certificate: View Certificate
Abstract
In this paper we are going to discuss the implementation and working of smart blind stick for obstacle detection and navigation. This project is implemented to provide a smart electronic guide for blind people. Different kinds of blindness and visual impairment makes people difficult to move from one place to another place. The main of our project is to provide some type of guidance to blind people while moving by helping them in detecting obstacles in their way via ultrasonic sensors, navigating them using GPS module and sending emergency message for rescuing them to caretakers using GSM technology. The system we proposed is an economical, easy-to-use solution for the blind to increase their mobility.
Introduction
I. INTRODUCTION
Vision plays vital role in human life. Most of the information we get from our surroundings is through our vision. According to the report of WHO [1] in 2011 estimates there are around 285 million people in world had visual impairment, approximately 39 million are having blindness and 246 million are had vision loss and that number could have increased today [2]. Blindness can be considered to be a lack of vision. It can be also considered to loss of vision that can’t be corrected using glasses or contact lenses. Vision loss is loss of vision happens suddenly or gradually increases over period of time. Out of total number, the count of visually impaired are aged more than 50 years. Due to these day-to-day activities like reading, writing, walking, socializing, and identifying things becomes very difficult task.
In the early days, visually impaired people used different ways like wooden sticks, taking help from other individuals, use of guide dogs for navigating them. But using them we have some limitations like depending upon others, obstacles can’t be detected correctly using a wooden stick as they need to feel objects, and can’t totally rely on dogs [3].
In the recent past, there are various types of guided systems developed for the visually impaired people using more effective sensors and devices. These systems which help them to reach their destination by their own without depending on others are known as aiding devices. One such example is using of IR sensors for obstacles detection. But they can be only used to detect nearby objects within a small range. Another example includes use of ultrasonic technology. In this technology, we use reflection properties of ultrasound. Like this we have in use of many other technologies like GPS, GSM, radio frequency identification (RFID), laser for making efficient as well as reliable blind stick for blind and partial blind people [4].
The scope of this paper is to make one such blind stick which is cost effective, efficient, easy to use. In our implemented system we used ultrasonic sensors to detect obstacles, GPS is used for knowing location of blind and GSM is used for sending messages to caretakers.
II. ITERATURE SURVEY
In this system [5], the system is implemented using IR sensors for obstacle detection. But IR sensors detect nearby objects, so using them is not really efficient. This system is economical and easy to use but can’t be totally reliable.
In other system [6] used ARM processor for coordinating GPS, ultrasonic sensors, voice module for detecting obstacles and navigation. But ARM processor can’t be used indoors thereby we can’t use it for navigating indoors.
In another system [7], they proposed blind stick using many sensors like ultrasonic sensors, GPS module, stereo cameras, vibration sensor, voice module. They mounted stereo cameras on helmet to know height of objects in their way. Vibration sensor and voice record playback module are used to provide response of obstacles to visually impaired people. It’s efficient but is complex and costly to design and implement.
So, taking advantages and seeing limitations of various systems we want to propose a system which is cost effective, easy to use, reliable blind stick which detects obstacles and also provides navigation.
III. METHODOLOGY
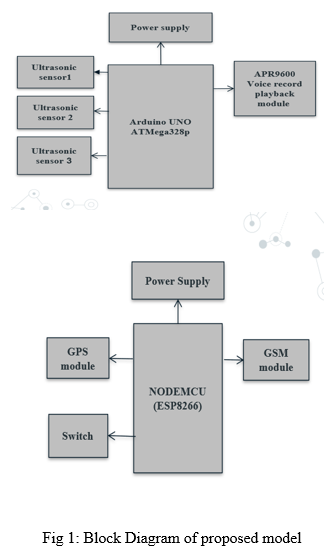
In the proposed system, we have two blocks one is for detecting obstacles and other is for navigating them. The hardware components used in our system are:
- Arduino Uno
- NodeMCU (ESP8266)
- Ultrasonic sensor (HC-SR04)
- APR9600 Voice record playback module
- GSM module
- GPS module
- Speaker
- Switch
In one block for obstacle detection, we used ultrasonic sensors. We interfaced three ultrasonic sensors to Arduino uno facing three directions i.e., left, right, straight. Ultrasonic sensors emit high frequency pulses of frequency 40KHz at regular time intervals. Ultrasonic sensors after emitting will wait for echo signal which will be first strike objects, after receiving it will calculate relative distance to target based on the time calculation between emitted and received signal. Whenever the obstacle is found within distance of 20-200 cm, the user will be notified with predefined voice messages enabling him to head towards appropriate correct direction. If the obstacle is not close to the system will do nothing.
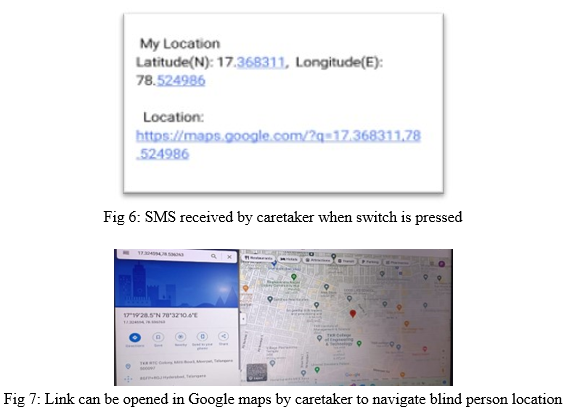
In another block we interfaced GSM module, GPS module to NodeMCU module. GPS module here is used to know location of blind. GPS will continuously navigate location by using latitude and longitude coordinates. These coordinates are processed by NodeMCU and converts into appropriate readable data. GSM module is used here to communicate with caretaker’s mobile. In case of emergency, whenever blind people feel they lost their way, they can simply ON the push button to send the location of theirs to the caretakers which is similar to google maps link predefined in the program and emergency message to rescue them.
Following are steps involved in detecting obstacles and navigation using blind stick:
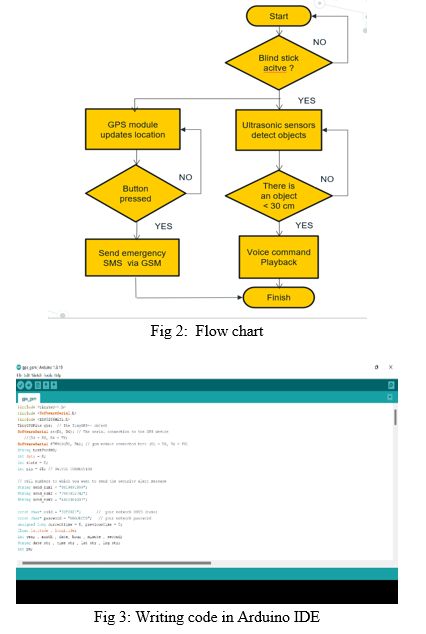
A. Steps for Obstacle Detection
- Once the system is powered on, ultrasonic sensors will emit high frequency signals of 40KHz frequency.
- Then system waits for receiving echo signal which will be first strike to objects.
- The distance of object is calculated according to time difference between trigger and echo signal.
- If the distance is between 20-200 cm, then appropriate direction of obstacle will be notified for user, else the system will do nothing and continuous sending trigger signals again.
B. Steps for Navigation
- Once the system is powered up, GPS module will continuously navigate latitude and longitude coordinates of user.
- If the switch is pressed by user, the emergency SMS which includes google map link of user will be send to already predefined numbers of caretakers.
- If switch is not pressed it will just track his location and does nothing.
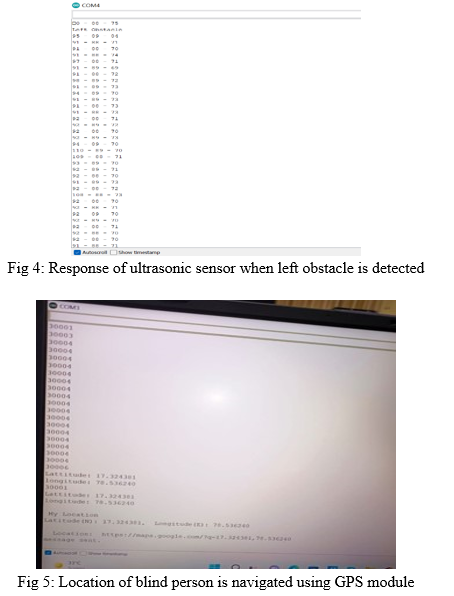
After interfacing components to Arduino uno and NodeMCU, we used Arduino IDE for programming. Arduino can be programmed in C/C++. The language used is very simple, easy to use and provides good interface for easy to write the code and read. We can easily dump code into Arduino and NodeMCU using USB cable. Arduino IDE has a serial monitor to display the output of operation performed. Allows one click compiling, verification and dumping of code onto Arduino

IV. RESULTS
The following outcomes help us understand working of proposed system:
References
[1] World Health Organization. Visual impairment and blindness, 2011. http://www.who.int/mediacentre/factsheets/fs282/en/ [2] Blindness and vision loss https://medlineplus.gov/ency/article/003040.htm#:~:text=Blindness%20is%20a%20lack%20of,blindness%22%20mean%20complete%20blindness. [3] Design and construction of smart ultrasonic walking stick for visually impaired,2021,IEEE Henry O.Omoregbee, Mabel U. Olanipekun, Ayobami kalesnwo and Oluwaferanmi A. Muraina. [4] A Survey of Voice Aided Electronic Stick for Visually Impaired People Gurubaran1 , Gowrishankar Kasilingam2 , Mritha Ramalingam3 1, 2&3 Faculty of Engineering & Computer Technology, AIMST University, Kedah, Malaysia. [5] Shantanu Gangwar, “Smart stick for Blind”, New Delhi, Sept. 26. [6] S.Koley and R. Mishra, ?Voice Operated Outdoor Navigation System for Visually Impaired Persons, International journal of engineering trends and technology, Vol.3,Issue 2, 2012. [7] S.Dhambare and A. Sakare, ?Smart Stick for Blind: Obstacle Detection, Artificial Vision and Real-time Assistance via GPS?, 2nd National Conference on Information and Communication Technology (NCICT) 2011.
Copyright
Copyright © 2022 Chaitanya M, G. Karthik, K. Prathyusha, K. Shiva Leela. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42901
Publish Date : 2022-05-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online