

Ijraset Journal For Research in Applied Science and Engineering Technology
Development of an Autonomous Real Time Collision Avoidance Mobile Robot
Authors: Dhruba Jyoti Sut, Steve James
DOI Link: https://doi.org/10.22214/ijraset.2022.40125
Certificate: View Certificate
Abstract
In most circumstances, mobile robots are stated to be autonomous, with collision avoidance being a crucial aspect of designing an autonomous mobile robot. The goal of this paper is to create a simple autonomous real-time collision-avoidance mobile robot that moves to utilise ultrasonic sensors and infrared modules. In this paper, a collision-avoidance mobile robot is designed with built-in intelligence that guides itself whenever an impediment is in its way and manoeuvre around them without any collision. This robotic vehicle is built with an AT Mega 328 microcontroller. An ultrasonic sensor detects any obstacles ahead of it and on either side of the robot, there are two infrared (IR) modules integrates to detect the obstructions and transmit an instruction to the microcontroller. The error generation is decreased with the help of the Kalman filter. Based on the input signal from different sensor integrated in the robot the microcontroller instructs to travel in a various direction by actuating the motors connected to it via a motor driver.
Introduction
I. INTRODUCTION
Collision avoidance, often known as obstacle avoidance, is defined in modern robotics as the capacity of a robot to manoeuvre through an unknown environment without colliding with surrounding obstacles. Obstacle escaping and surveillance robots are primarily employed in blind environments and applications. These robots are also utilised for surveillance and as rescue robots in disaster zones, mining areas, and other places where artificial surveillance and collision avoidance systems are required for robotic autonomous movements [2]. In a diverse range of environments, the presence of obstacle avoidance in robots ensures greater flexibility to the robot for navigation purposes so that continuous human intervention can be avoided. Collision avoidance is a fundamental prerequisite for any self-driving mobile robot. Basically, there are two different categories of mobile robot navigation challenges which are global and local depending upon the environment the robot is dealing with. In global navigation, the environment that mobile robot deals with is known and the course that avoids the obstacles in the environment is chosen initially. In the global navigation technique, graphical maps including information about the barriers are utilized to select a suitable path. The robot's surrounding environment is unknown/unidentified or only somewhat known while using local navigation. Therefore, sensors are used to identify the obstacles and to avoid the collision of the robot to the obstacle in the surrounding. The main aim is to move the robot along the surrounding without collision with any of the obstacles for making this easier another technique called path planning can be utilized where the robot's path is been planned ahead of time [3]. Obstacles will be avoided by the obstacle-avoiding robot on its way to its operational goal. Obstacle-avoiding robots are particularly significant on the production floor because of their reliability, accessibility, and cost-effectiveness in industry and technical applications [4]. These obstacle avoidance robots are mainly used in blind applications.
Movable robots are now utilised in a variety of industries, including home security, industrial monitoring, hospitals, and a variety of others [5]. Mobile robots have an important role in industrial automated processes, household robotization, healthcare, space research, and military applications [6]. Currently various autonomous robots are increasingly functioning in our environment, and they will greatly assist us in our everyday routines [7][8]. Where collision avoidance or obstacle avoidance becomes one of the important features of an autonomous mobile robot wherever it is used. Collision avoidance robots are designed to manoeuvre in unfamiliar environments by avoiding collisions. These robots detect the obstructions in their route, avoid them, and resume their drive. In the process of getting a smoother robot movement the Kalman filter helps the system to prevent unnecessary obstructions when transmitting information from sensors, as well as adjust the quantity of noise adaptively [9]. The Extended Kalman Filter (EKF) is used by the centralised filter in [10] to selectively fuse new measurements data gathered from specific sensors to carry out object tracking at each step. Wall-following, edge detection, and line following are some well-known approaches for robot navigation. One commercial solution uses a wall-following methodology on a floor cleaning robot for large halls. For obstacle avoidance, edge detection is a much more generalized and extensively used method.
Obstacle avoidance depending on the boundary detection approach has the disadvantage of requiring the robot to halt in front of an obstruction in gathering a more accurate measure. Collision avoidance is built into every mobile robot, from basic algorithms that detect an item and halt the robot to prevent collisions to more complicated algorithms that allow the robotic system to redirect around obstacles. The latter algorithms are more complex since they require both the identification of an obstruction and some type of quantitative assessment to determine the size of the obstacle. Following this, the obstacle avoidance algorithm must manoeuvre the robot around the impediment and continue the movement in the direction of desired goal location.
II. PROPOSED SYSTEM
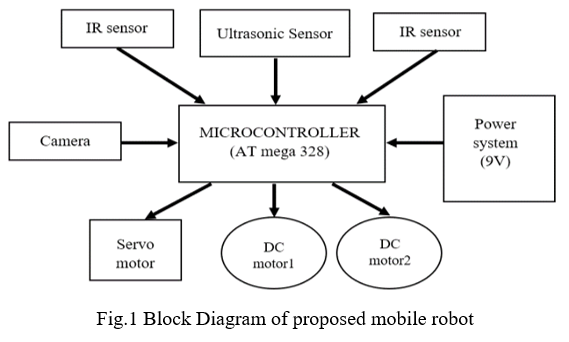
The goal of the suggested system is to create a surveillance system that is simple but yet dependable, user-friendly, and minimal in cost. The suggested system includes an ultrasonic sensor and two IR sensors on each side for obstacle detection, as well as an Arduino uno (AT mega 328) as the brain. The designed system is a three-wheeled (one-caster-wheeled) mobile robot with two driving motors controlled by a motor driver shield with an L293D motor driver. The L293D is a 16-pin IC that can simultaneously control two DC motors in either direction. The H-bridge idea is used in the driver IC. For obstacle detection, a servo motor rotates the ultrasonic sensor 180 degrees. And to improve the sensor output for avoidance of obstacles/ localisation, Kalman filter was used in the developed autonomous mobile robot for more smooth movement. Integrated camera provides a real time vision of the surrounding environment of the mobile robot.
The data is handled by the AT mega 328 microcontroller, and impediments are discovered and avoided using a simple algorithm. A 9v power supply was used to power the system. During navigation, the steering algorithm in this paper ensures that the robot does not have to stop for more than 10 seconds in front of an obstacle. As a result, the robots may be able to navigate smoothly while avoiding collisions, overcoming some of the obstacles listed above. For easy reference, this robot also contains an LCD display that shows the distance between the robot and the obstacle. Based on the needed applications, this approach and architecture can be further enhanced. The system has been configured for surveillance or live video streaming. A UVC-OTG receiver is used to receive these video signals, which can then be viewed on a smartphone or tablet. The mobile robot's block diagram is shown below in Fig. 1.
The robot described in this paper should be able to accomplish the following objectives:
- The mobile robot would be able to detect barriers in its path based on a predetermined threshold distance, avoid them, and modify its trajectory without requiring external control.
- It will measure the obstacle's distance in real time and display it on an LCD screen.
- It would be able to function effectively in an unfamiliar environment, and it would provide real-time vision of the surroundings.
III. DESIGN
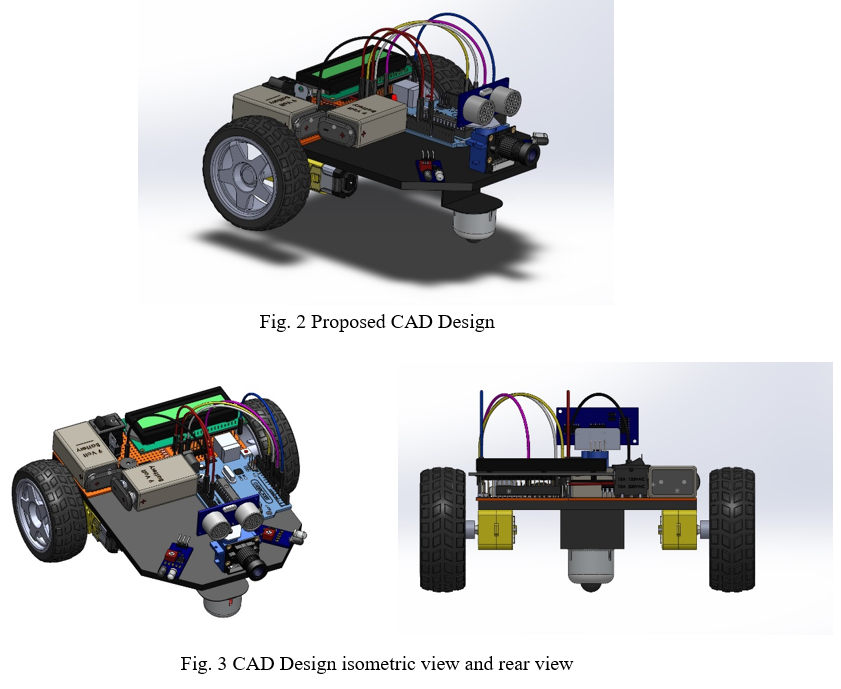
Here the proposed design of the mobile robot is a three-wheeled mobile robot, where two wheels are driver wheels and one wheel is a driven wheel. the driven wheel is a caster ball wheel. which can make the robot move in any direction without any difficulties in tunings. This caster wheel will ensure the mobile robot changes its direction whenever an obstacle is detected by the system. The design of the robot is done with the help of CAD software called SolidWorks. using this software, the initial design of the robot is developed. here the developed design of the robot is shown in Fig. 2. It consists of a base plate of dimension 180mm x 150mm this base plate is the main body of the robot.
This robot consists of one servo motor two infrared sensors, one ultrasonic sensor, one digital camera, one LCD screen display and a microcontroller with a battery source, all these components are placed on this base plate this base plate is considered as the chassis of the robot. The dimension of the driver wheels used in this robot is 65mm and this wheel is connected to two DC motors which are clamped to the base plate. The third wheel, that is the ball caster wheel is attached to a clamp in order to ensure the correct wheelbase. this robot consists wheelbase of 32.5mm.
IV. WORKING MECHANISM
In this mobile robot, the ultrasonic sensor was installed above a servo motor. When an object in front of the ultrasonic sensor is detected, a signal is sent to the ATmega328 microprocessor, which shows the obstacle's distance on a 16x2 LCD display. At 5V working voltage, the ultrasonic sensor has a detecting range of 2-400 cm and a measurement angle of 30º. Whenever the robot is going on the desired path this device detects distance by generating a specified frequency ultrasonic sound wave and receiving the wave reflected back from the target object. The following formula is used to calculate it
Distance = Time taken / 2 x Speed (1)
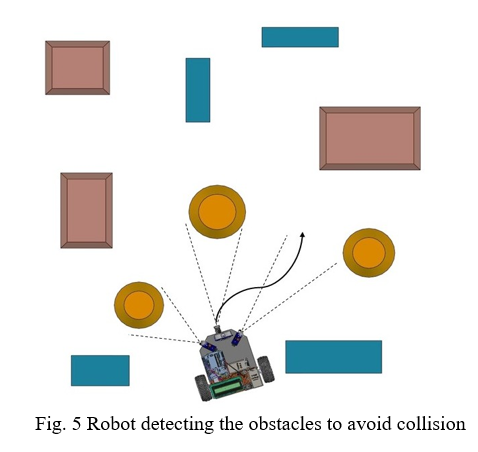
Whenever it encounters a barrier, ultrasonic waves are reflected back from the item, and this information is sent to the microcontroller. Based on ultrasonic signals, the microprocessor controls the motors on the left, right, rear, and front. When the calculated distance between the microcontroller and the motor driver is less than 10 cm, the microcontroller sends a signal to the motor driver to propel the robotic vehicle backward for one circle and then halt. When it identifies an obstruction, the buzzer on the device sounds an alarm and a red LED illuminate to indicate the presence of the barrier. After one spin in the backward direction, it comes to a halt, and the servo, together with the ultrasonic sensor, rotates in the left and right directions. The ultrasonic sensor evaluates the distance between the left and right obstacles and compares it to the distance between the front and back obstacles. The robotic vehicle drives left or right based on the longest distance compressed and the presence of two IR sensors in both directions (left and right). The robotic vehicle drives forward when both sensors (IR and Ultrasonic Sensor) detect nothing or no barrier. A green LED glows continually as it goes forward. When the robot is powered on, this process is repeated in a cycle.
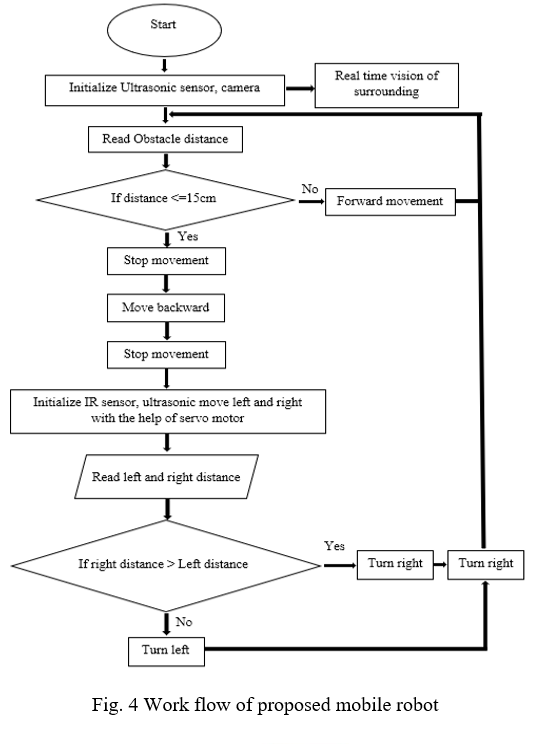
The Kalman filter enables the mobile robot to avoid extra obstructions when transferring data from the obstacle sensors (ultrasonic and infrared), as well as adaptively adjust the strength of noise, resulting in smoother localization. The mobile robot's environment is seen in real-time thanks to an integrated camera. The designed working flow of the developed mobile robot is shown in Fig. 4. The motor's highest RPM is 150 RPM, and the diameter of the wheel is 65mm. The robot continues to move until it reaches a distance of 10cm from the object.
The robot can be improved in the future to improve its accuracy around turns [11]. Now, out of 50 obstacles, the robot successfully recognizes and avoids 49 of them within a 10cm radius.
Accuracy = (number of trails/total number of trails) *100 (2)
= (49/50) *100
= 98 %
V. RESULTS
After designing and testing was successful the initial concept is taken for the assembly, the required hardware’s are purchase and connected as shown in the given Fig. 6. Acrylic sheets were utilised to construct the robot's base. They also have good impact strength, formability, and are resistant to sunshine, rain, and the majority of pollutants. Hence this hardware’s are assembled together to form the collision avoidance autonomous mobile robot.
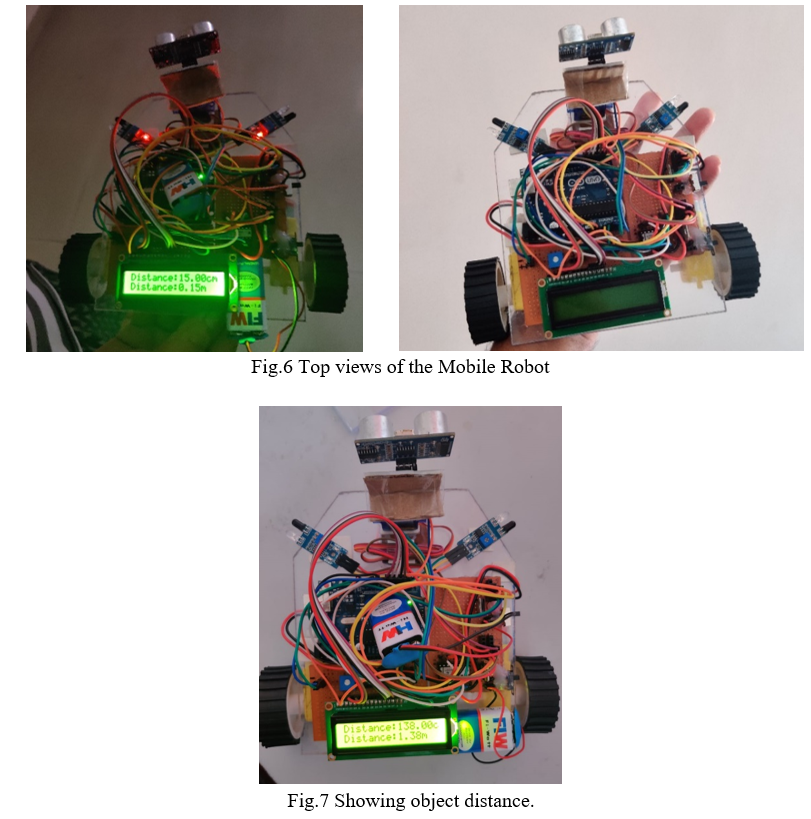
The robot's software counterpart assisted in connecting with the mobile robot to transmit parameters for guiding movement, ensuring the robot's autonomy. This robot is totally autonomous since, after the first loading of the code, it requires no operator participation during operation. When placed in an unknown environment containing obstacles, it moved with amazing precision while avoiding them all, measuring the distance between the obstacles and displaying the distance on the LCD screen in real time. The real-time distance measurement ensures that the robot is working correctly by just viewing the distance. first, the robot is placed in a pre-fixed obstacle area where the distance of the obstacles from the robot is well known. in that initial testing, the robot shows the distance and detect the object and move away from the object to ensure collision-free movement along the path.
Conclusion
This research created a real-time collision prevention robot that can recognise and avoid objects in its way. The developed mobile robot is very lightweight, because of its small size it can easily move in between obstacles without any collision with the help of sensors integrated into that. After testing the code in various environments, the code that allows the robot to avoid obstacles is transferred into the robot. The integrated camera on the front side of the mobile robot gives a real-time vision which also gives a clear idea about the surrounding. As a result, the obstacle avoidance robot is built with a 98 percent accuracy rate after using the Kalman filter. The future mobile robot can able to maintain a distance of ~10 cm from any object during its real execution. This capability, together with an integrated camera in the mobile robot, aids in the detection of fatalities and monitoring in locations where humans are difficult to reach. Because there are only three separate sensors, the sensor framework is incredibly inexpensive. The future scope of this work is implementing advanced Machine Learning techniques to identify obstacle types, a better understanding of the working environment for finding the best optimal route to reach the goal.
References
[1] “duino-robotics,” Obstacle Avoidance Tutorial, 2013. [Online]. Available: http://www.duino robotics.com/obstacleavoidance.. [Accessed november 2019]. [2] C. Li, G. Cui and H. Lu, \\\"The design of an obstacle avoiding trajectory in unknown environment using potential fields,\\\" The 2010 IEEE International Conference on Information and Automation, 2010, pp. 2050-2054 [3] H. H. Shehata and J. Schlattmann, “Virtual Obstacle Parameter Optimization for Mobile Robot Path Planning A Case Study,” J. Adv. Mech. Eng. Sci., vol. 2, no. 4, pp. 25–34, 2016, doi: 10.18831/james.in/2016041004. [4] R. Ismail, Z. Omar, and S. Suaibun, “Obstacle-avoiding robot with IR and PIR motion sensors,” IOP Conf. Ser. Mater. Sci. Eng., vol. 152, no. 1, p. 012064, Oct. 2016, doi: 10.1088/1757-899X/152/1/012064. [5] M. P. Rajkumar, P. S. P. Tondare, and P. S. P. Gaikwad, “Design and Realization of Automatic Video-Based Docking Structure For Home Surveillance Robots By Using Raspberry Pi,” vol. 8, no. 11, pp. 848–853, 2017. [6] G. Song, H. Wang, J. Zhang, and T. Meng, “Automatic docking system for recharging home surveillance robots,” IEEE Trans. Consum. Electron., vol. 57, no. 2, pp. 428–435, 2011, doi: 10.1109/TCE.2011.5955176. [7] G. Song, Z. Wei, W. Zhang and A. Song, “A hybrid sensor network system for home monitoring applications”, IEEE Trans Consum Electron, Vol. 53, No. 4, pp. 1434-1439, 2007. [8] G. Song, Y. Zhou, Z. Wei and A. Song, “A smart node architecture for adding mobility to wireless sensor networks,” Sens Actuators A Phys, vol. 147, no. 1, pp. 216–221, 2008. [9] M. Derkach, D. Matiuk and I. Skarga-Bandurova, \\\"Obstacle Avoidance Algorithm for Small Autonomous Mobile Robot Equipped with Ultrasonic Sensors,\\\" 2020 IEEE 11th International Conference on Dependable Systems, Services and Technologies (DESSERT), 2020, pp. 236-241, doi: 10.1109/DESSERT50317.2020.9125019 [10] J. Yu, S.E. Li, “Dynamical Tracking of Surrounding Objects for Road Vehicles using Linearly-Arrayed Ultrasonic Sensors,” IEEE Intelligent Vehicles Symposium (IV), 2016, pp. 72-77. [11] R. Rangesh, R. Vipin, R. Rajesh, R. Yokesh “Arduino based obstacle avoidance robot for live video transmission and surveillance” 2020 IRJET, vol: 07, pp. 1701-1704.
Copyright
Copyright © 2022 Dhruba Jyoti Sut, Steve James. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40125
Publish Date : 2022-01-29
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online