

Ijraset Journal For Research in Applied Science and Engineering Technology
Self-Driving Car
Authors: Sushant Patinge, Vishesh Tembhare, Vedant Agnihotri, Rani Behare, Fatema Hardwarewala, Vedesh Kelapure, Chaitanya Sarode
DOI Link: https://doi.org/10.22214/ijraset.2023.50830
Certificate: View Certificate
Abstract
The evolution of Internet of Things has served up the catalyst in the field of technology. Automobile manufacturers such as Ford, Audi, Hyundai, Tesla, and other companies are investing billions of dollars in autonomous vehicle driving research. According to the new information, in the next 30 years, this fast-developing industry will be worth $ 7 trillion. This will create a shift on the way cities are planned, as less parking spots will be needed, and secondly, in a developed city with most of its vehicles being connected and autonomous, traffic optimization will be able to be strongly applied by coordinating movement of the vehicles..
Introduction
I. INTRODUCTION
A self-driving car can analyze surrounding without any human interactions and take decisions accordingly without any human interactions. A number of sensors are combined and are used to identify the pathway and road signal from the surroundings. An autonomous car is has reduced costs due to less wastage of fuel, increased safety, increased mobility, increased customer satisfaction and that’s why it has more advantage than traditional cars. The biggest benefit of using a self-driving car is significantly fewer traffic accidents. More than 90% of all accidents are caused by some degree of human error, including distraction, impaired driving, or poor decision making. With self-driving cars making decisions and communicating with one another, the number of accidents should reduce.
A self-driving car, also known as an autonomous car or driverless car, is a vehicle that can navigate and operate itself without human intervention. Self-driving cars use a combination of sensors, cameras, radar, and advanced algorithms to detect and respond to their environment, allowing them to safely transport passengers from one location to another. Self-driving cars have the potential to revolutionize transportation by improving safety, reducing traffic congestion, and increasing efficiency. They can also provide mobility for people who are unable to drive, such as the elderly or those with disabilities. However, the development of self-driving cars is still in its early stages, and there are many technical, legal, and ethical challenges that must be addressed before they can become widespread. These include issues related to cybersecurity, liability in accidents, and privacy concerns. Despite these challenges, many companies are investing in the development of self-driving cars, and they are expected to become more common on roads in the coming years. As the technology advances and becomes more widespread, self-drivingcars have the potential to transform the way we think about transportation and mobility. Over the last years the automotive industry has advanced significantly towards a future without human drivers. Researchers are currently trying to overcome the technological, political and social challenges involved in making autonomous vehicles mainstream. These vehicles need to be safe, reliable and cost-efficient. Connecting them and creating coordination mechanisms could help achieve these goals. This project proposes a self-driving Radio Control car. This car runs in an artificial environment. The environment consists of various real life obstacles, traffic signals, speed boards, etc. The car has to run and adjust according to the environment. This project focuses on lane driving, obstacle detection and road signs. This is a small scale representation of the self-driving car using various Deep Learning, Computer Vision techniques. With the increase in the size of the model the complexities increase as well. The project focuses on basic driving features considering the safety and cost of the model.
II. RELATED WORK
Self-driving cars have been a topic of increasing interest in the literature in recent years. Researchers have explored the technical aspects of developing autonomous vehicles, including the use of sensors and algorithms to detect and respond to their environment. Studies have also examined the potential impact of self-driving cars on society, such as the potential to reduce traffic congestion and improve road safety.
One key area of research has focused on the ethical and legal implications of self-driving cars. Questions have been raised about who would be liable in the event of an accident involving a self-driving car, and how regulations should be developed to ensure the safety and privacy of passengers.
Another area of interest has been the impact of self-driving cars on the job market. Some studies have suggested that the widespread adoption of autonomous vehicles could lead to job losses in the transportation industry, while others have argued that new jobs will be created to support the development and maintenance of the technology.
Overall, the literature on self-driving cars suggests that while there are many potential benefits to the technology, there are also significant challenges that must be addressed. As self-driving cars continue to develop and become more common, it will be important for researchers, policymakers, and industry leaders to work together to ensure that the technology is safe, reliable, and equitable for all.
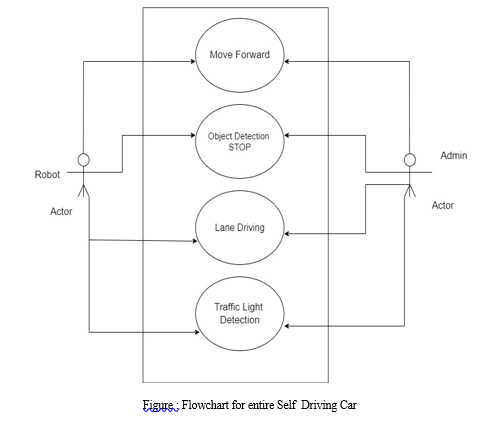
III. PROPOSED METHDOLOGY
Developing a self-driving car requires a systematic and rigorous approach to ensure safety and reliability. The proposed methodology for developing a self-driving car involves several key steps. First, the system requirements should be defined, including functional and safety requirements and driving scenarios. Second, the architecture of the system should be designed, including hardware and software components and their interfaces. Third, the perception system should be implemented, which involves developing algorithms and models to process sensor data and identify objects and obstacles. Fourth, the mapping and localization system should be created, which uses sensor data to build a high-definition map of the environment and determine the vehicle's position within that map. Fifth, the planning and decision-making system should be designed to use sensor data and mapping information to make driving decisions and plan a safe and efficient path for the vehicle. Sixth, the control system should be implemented to execute the commands from the planning and decision-making system through the vehicle's actuators. Seventh, extensive testing and validation of the self-driving car system should be conducted to ensure safety and reliability. Finally, after obtaining necessary certifications and regulatory approvals, the self-driving car system can be deployed on the road. Throughout the development process, a rigorous approach to safety and risk management should be adopted, and the system's performance and reliability should be continuously monitored and improved.
IV. SYSTEM ARCHITECTURE
A. Step1: Components Required
- Arduino UNO.
- IR Sensor(Left and Right Side).
- Ultrasonic Sensor(HC SR04).
- Mini Servo Motor.
- L298 Motor Driver.
- DC Motor.
- Male to Female Connecting Wires.
- Cell Holder.
- Breadboard.
B. Step 2: Procedure
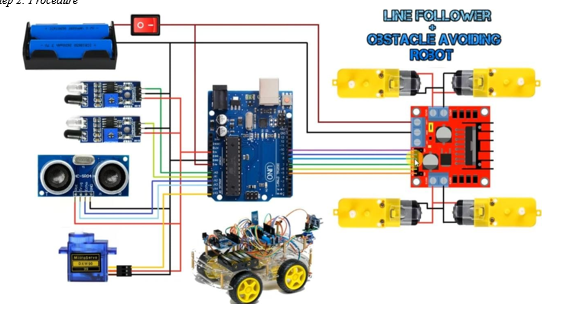
- First of all,we have used three cells of 2500 mAh in series for power source and we have used a switch at positive/negative terminal for power on/off.
- Arduino UNO is used as a controller.
- Two IR sensors are used , one is left side and other is at right side for following line.
- Along this, Ultrasonic Sensor( HC-SR04 ) is for obstacles on following line.
- Breadboard is used for building curcuits mainly it allows components to be removed and replaced easily it mainly used for connections.
- A mini servo motor is used and our car follows the line.When the hurdle will come, it will check the left or right-side hurdle using Ultrasonic Sensors.The hurdle of which side will be close,it will come back on the line following by avoiding the opposite side hurdle.
- We have used a L298 Motor Driver.There are to H-bridges in L298 motor that means that there is an option to drive two Dc motor clockwise or anti-clockwise.
- To control right side motors,3 wires from Arduino are connected to L298.First is enableB. En3 and en4 are used to drive right side motor clockwise and anti-clockwise.enableB is used to control the speed of right -side motors.
- Similarly,3 pins of Aurdino are used for left side motors. en1 and en2 are used to drive left side motors clockwise and anti-clockwise and EnableA used to control the speed of left side motors
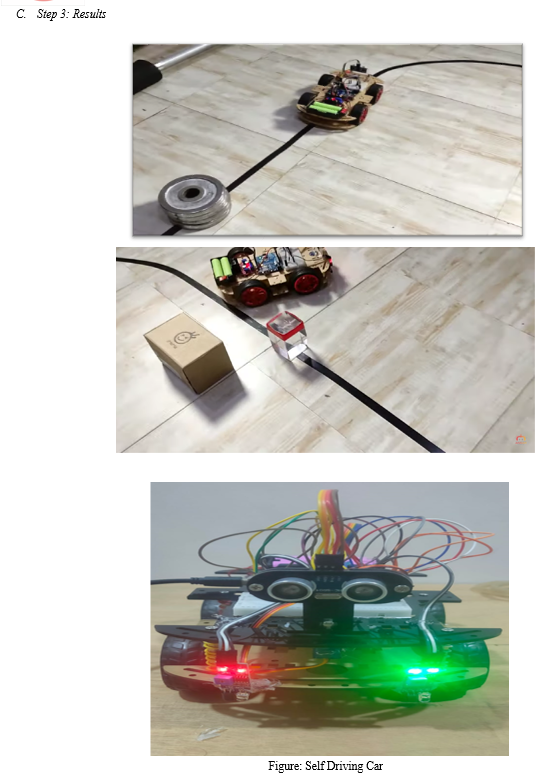
Conclusion
Self-driving cars are the future of the automobile industry. In our proposed model, implementation of self driving cars can be cost efficient and still give higher accuracy rates. The car is trained to move in a virtual environment which is similar to the real life environment and functions just like the human mind does while driving. Lane driving, lane changing, traffic rules, etc are the major factors this model is focusing upon. This model can be implemented on a large scale though the complexities will increase with the increase in the size of the project. Hence, a cost efficient model with high accuracy rates is what the proposed model is all about.
References
[1] M. S. Brandon Schoettle, \"A SURVEY OF PUBLIC OPINION ABOUT AUTONOMOUS AND SELF- [2] DRIVING VEHICLES IN U.,S., U.K., AUSTRALIA,\" 2014. [3] S. M. M. T. Mike Daily, \"Self-Driving Cars,\" 2017. [4] A. S. I. R. Jean-Francois Bonnefon, \"The social dilemma of autonomous vehicles,\" 2015. [5] U. o. M. Centre for Sustainable Systems, \"Autonomous Vehicles Factsheets,\" 2018. [6] N. Corporation, \"End to End Learning of Self-Driving Cars,\" 2016.Conference on Intelligent Computing and Control Systems (ICICCS 2019) [7] Dong Dong 1 , Xiao-Yang Li2 , XiaoTong Sun3,”A Vision-Based Method For Improving the Safety Of Self-Driving”,School of Reliability and Systems Engineering, Beihang University Science and Technology on Reliability and Environmental Engineering Laboratory Beijing, China [8] Gowdham Prabhakar, Binsu Kailath,Sudha Natarajan, Rajesh Kumar,”Obstacle detection and classification using Deep learning for tracking in high-speed Autonomous driving”, IEEE Region 10 Symposium (TENSYMP) [9] Mohammad Rubaiyat Tanvir Hossain, Md. Asif Shahjalal, Nowroz Farhan Nur,”Design of an IOT based Autonomous vehicle with the aid of computer vision”,International Conference on Electrical, Computer and Communication Engineering (ECCE), February 16-18, 2017, Cox’s Bazar, Bangladesh.
Copyright
Copyright © 2023 Sushant Patinge, Vishesh Tembhare, Vedant Agnihotri, Rani Behare, Fatema Hardwarewala. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET50830
Publish Date : 2023-04-22
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online