

Ijraset Journal For Research in Applied Science and Engineering Technology
Path Planning Robot Using PI-CAM
Authors: Ankit Srivastava, Prabhat Singh, Sushil Kumar Verma, Kumar Kartikey, Prof. Shubham Shukla
DOI Link: https://doi.org/10.22214/ijraset.2022.41133
Certificate: View Certificate
Abstract
Currently, the path planning robot is one among the foremost researched topics in autonomous robotics technology. Path planning has important applications in many areas, for example industrial robotics, autonomous systems, and 3D digital representation that can perform various types of simulations iteratively about product performances. The utilization of versatile robots for modern purposes like arranging, moving, and putting is at this point not an inclination however a need. Our path planning robot is using OpenCV, image processing and various hardware’s such as raspberry pi 4, Arduino uno , motor driver and pi -cam. The analysis of image will be done using image processing through raspberry pi and for edge detection canny edge algorithm is used.
Introduction
I. INTRODUCTION
Path planning is a principal task for autonomous robots. It requires the assurance of an ideal impact free path between the robot's present position and the following objective. The requirement for path planning emerges in two somewhat various situations. In the principal case it includes observing the ideal way through an obstruction field to a pre-indicated objective, which is generally referred to as point-to-point navigation. In the subsequent case, the robot is needed to simply "go ahead"; that is, the robot is needed to follow a way characterized by path lines or the edges of a road surface, and there is no objective provided.
Path planning is the means by which independent robots prepare their movements and navigate through the environment. In our project we are using canny edge detection algorithm for edge and lane detection. For analysing the input images, we have used image processing using OpenCV. Motor Drivers are also used for controlling the motors accordingly. The raspberry pi 4 is used to assemble all the hardware equipment and act according to it.
A. Raspberry Pi 4 with Pi-Cam
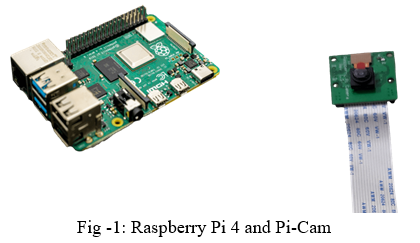
In this path planning robot, we are using raspberry pi (4 model B) which has Wi-Fi and Bluetooth module installed, as the primary handling chip. This raspberry pi module has capability to figure the result like a computer simply in a small-scale size variant. We can in fact interface the mouse and console to this module. We have utilized a 32GB miniature SD card as inward memory to store booting records and introduced the Raspbian OS. The contribution to it is given by ceaseless spilling of pictures by means of pi-Cam. This Pi-Cam is being associated with the raspberry pi module through the CSI port. This info is shipped off the handling calculation over the neighbourhood have. Here we use OpenCV and Machine Learning to assess the result which is taken care of to the Arduino Uno.
???????B. L298 H bridge (Motor Driver)
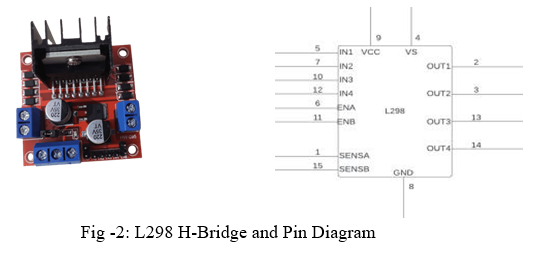
The L298 is known as a dual H-bridge is a coordinated circuit in 15-lead Multi watt and PowerSO20 bundles. Polarity of the motors can we reversed using this motor driver. This circuit has a high voltage and high current double extension driver which can acknowledge TTL rationale levels took care of by Arduino. By utilizing this component our robot can undoubtedly pause and run according to the instructions provided.
C. Arduino Uno
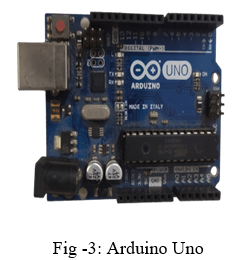
Arduino Uno is an open-source hardware and a microcontroller board. With a 14-pin design for input/output, a USB association, a power jack, an ICSP header, and a reset button, it has everything expected to support the microcontroller. This module can be without any problem associated with any PC utilizing a USB link and can be gotten to by its current circumstance called IDE. This IDE has a text proof-reader with a toolbar for normal capacities and a progression of menus. The raspberry pi module gives contribution to Arduino through advanced pins. The Arduino takes care of the suitable sign to the H Bridge through the remainder of the pins to control the motor in like manner.
II. ARCHITECTURE AND DESIGN
A. Design
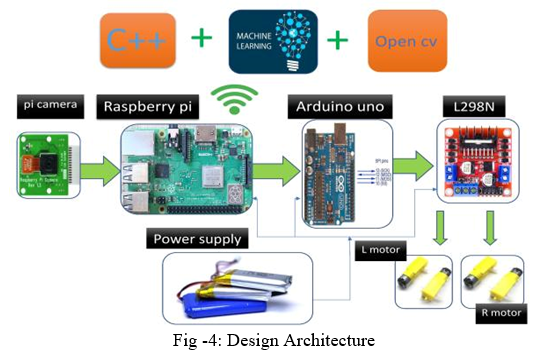
In our self-driving vehicle, we are involving raspberry pi as the primary handling chip. Raspberry pi model 3 B is utilized as it has a Wi-Fi module to associate our vehicle through localhost. We downloaded the Raspbian Operating System and blazed it in
Raspberry pi. Then, at that point, interestingly, a RJ45 Ethernet link was utilized to interface it to our PC. Wi-Fi sharing was permitted through Ethernet link utilizing the IP address gave to Raspberry pi. From that point OpenCV was introduced in the OS. The contribution to the Raspberry Pi is given by consistent spilling of pictures by means of Raspi Cam2. This information is given to the handling calculation over the localhost. Here PC Vision and Machine Learning are utilized to assess the result. This result is taken care of to the Arduino UNO. The Arduino takes the contribution from Raspberry pi and sends the separate calculation to the H Bridge to achieve the wanted control in the engines. The underneath block outline
addresses the associations between different components in our vehicle.
???????B. Image Processing
Image Processing is a technique which is used to analyse the images, get some useful information’s, and do some operations on it. It is a kind of signal handling where information is a image and result might be image or qualities/properties related to it.
First, we will take input to the car as stream of images by the pi-cam. The required camera libraries were pre-installed in the OS.
There are calculations for picture capturing, video capturing, lastly to compute frames each second. The OpenCV deals with the BGR picture, so the last picture is changed over from BGR to RGB utilizing some functions. Then we made Region of Interest (ROI) where the genuine detection will be formed. This ROI goes through transformation change for suitable picture analysis. From there on picture thresholding is done to change over the grayscale picture caught by the pi-cam into the highly contrasting picture. On this edge picture, we will use canny edge detection algorithm and both the edge and pictures are added together.
???????C. Path Planning
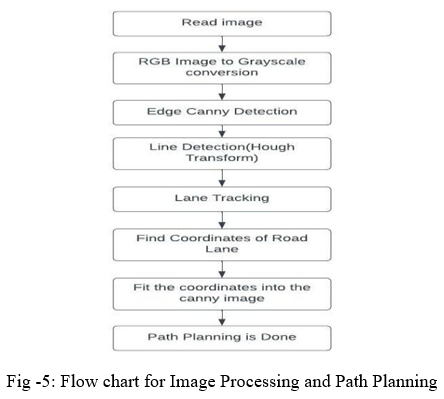
For path planning, after picture processing, we get the distance as the 255 white pixels from the left side of the return of Interest. For this, the pixels are dealt with like vectors to see as their positions. The histogram is utilized for this reason. If the distance of white pixels increments proper orders are send off the Arduino UNO for taking the right turn. If the distance diminishes it shows the Arduino UNO to take the left turn. The level of turn required is aligned depending on the distance determined.
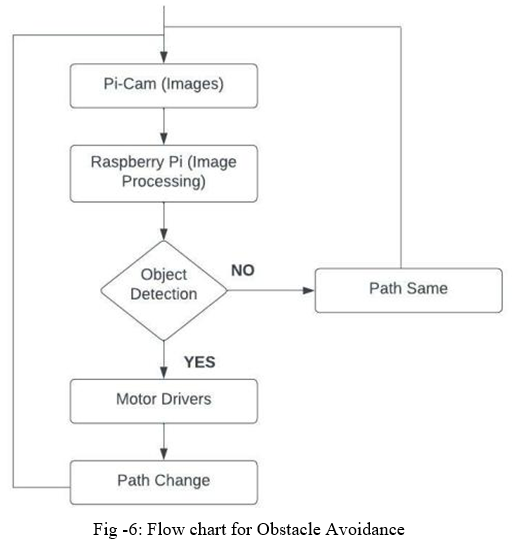
D. Object Avoidance
For Object avoidance, the raspberry pi needs to get inputs in form of images which it will get from pi-cam in real time. If any object comes in the path of the robot, then the pi-cam will get the images and send it to the raspberry pi where all the necessary modules are assembled, and the image processing will take place. In Image processing it will find whether there is any obstacle present on the path and if that’s true it will send input to motor drivers. Motor driver has sub motors upon getting the inputs from raspberry pi the motors will act accordingly. As the images are send to raspberry pi and any object is detected then by using Image Processing algorithm, commands will be sent to motors, and they will change their direction accordingly to avoid the obstacle and this is a continuous process until the robot is moving.
IV. FUTURE SCOPE
Our project also expands in the field of medical. We can automat the medical facilities like distribution of medicines, ECG checking, temperature checking, etc. We will provide some instructions and data of path planning to deliver these medical facilities according to the need.
Conclusion
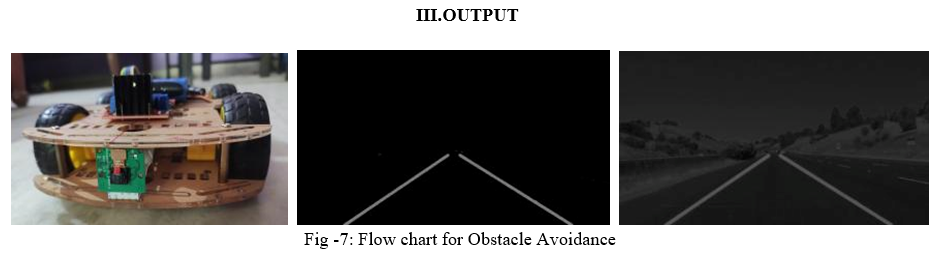
In our Project, we aimed at making a path planning robot as it can detect road lanes and the obstacle which can help in automating many services. The robot was able to move through the path according to the road lanes and changes its path when any obstacle is detected. According to the data provided by the raspberry pi using image processing the instruction are sent to the motor drivers which was able to act operate successfully according to the instructions.
References
[1] Mr. T. P. Kausalya Nandan, S. N. Anvesh Kumar, M. Bhargava, P. Chandrakanth, M. Sairani. Controlling Obstacle Avoiding and Live Streaming Robot Using Chronos Watch. International Journal of Engineering Innovation & Research Volume 5, Issue 2, ISSN: 2277 – 5668. [2] Narathip Thongpan, & Mahasak Ketcham, The State of the Art in Development a Lane Detection for Embedded Systems Design, Conference on Advanced Computational Technologies & Creative Media (ICACTCM’2014) Aug. 14-15, 2014 [3] Muhammad B. A. and Tae-Sun C., 1999. Local Threshold and Boolean Function Based Edge Detection, IEEE Transactions on Consumer Electronics, Vol. 45, No 3 [4] Kreucher, C.; Lakshmanan, S., 1999. A frequency domain approach to lane detection in roadway Image Processing. International Conference on ICIP 99, Volume: 2, 24-28 Oct.1999. Pp 31 -35 [5] V. Q. Nguyen, C. Seo, H. Kim and K. Boo, \"A study on detection method of vehicle based on lane detection for a driver assistance system using a camera on highway,\" 2017 11th Asian Control Conference (ASCC), Gold Coast, Australia, 2017, pp. 424-429. [6] Mariut, F., C. Fosalau, and D. Petrisor. \"Lane mark detection using Hough Transform\" In Electrical and Power Engineering (EPE), 2012 International Conference and Exposition on, pp. 871-875. IEEE, 2012. [7] Ding, Dajun, Chanho Lee, and Kwang-yeob Lee. \"An adaptive road ROI determination algorithm for lane detection.\" In TENCON 2013-2013 IEEE Region 10 Conference (31194), pp. 1-4. IEEE, 2013. [8] Tushar Wankhade & Pranav Shriwas, Design of Lane Detecting and Following Autonomous Robot, IOSR Journal of Computer Engineering (IOSRJCE) ISSN: 2278-0661 Volume 2, Issue 2 (July-Aug. 2012), pp. 45- 48.
Copyright
Copyright © 2022 Ankit Srivastava, Prabhat Singh, Sushil Kumar Verma, Kumar Kartikey, Prof. Shubham Shukla. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41133
Publish Date : 2022-03-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online