

Ijraset Journal For Research in Applied Science and Engineering Technology
Performance Analysis of Buck Boost and Cuk converters for Solar PV Applications using PI controller and Fuzzy Logic Controller
Authors: Huliraja ., S. G. Srivani
DOI Link: https://doi.org/10.22214/ijraset.2022.43154
Certificate: View Certificate
Abstract
In this paper, analysis of DC-DC converters Buck-Boost and Cuk converter by using PI Controller and Fuzzy Logic controller. These converters are mainly used in solar PV applications and it is explained. In this paper mainly MATLAB/ Simulink software is used for the compare the performance of both. the design is mainly compared with the proportional integrated controller versus FLC. The main objective of this work to reduce the overshoot of these types of converters. The buck boost and cuk converter are simulated for different Loads and their output voltage is settle at desired voltage The performance of buck-boost and cuk converter are simulated using Matlab/Simulink and comparison study is performed. The complete control system has been developed analysed and validation by the simulation.
Introduction
I. INTRODUCTION
In recent year there has been an increasing in the development of DC-DC converter to improve the dynamic behaviour [1-2]. The performance of power converters is the choice of control methods. Frequency domain analog methods predominantly used are based on an equivalent linear small signal model of the converter and this model has restricted validity especially for systems with strong non-linearity. FLC is mostly used in industrial application and the main tool of FLC operation is membership function. It doesn’t require any mathematical model for a system. The FLC provides a faster transient response [3-4]. Generally, DC-DC converters are used in DC motor drive applications, switched power supplies, marine cranes, electric cars, power factor correction applications and PWM based photovoltaic systems [1-3]. DC-DC converters are classified according to circuit topologies as buck converter, boost converter, buck-boost converter, SEPIC converter and Cuk converter etc. [3]. Buck and boost converter are the basic ones among those converters. The Cuk and buck-boost converter is obtained by the cascade connection of the buck and boost converter. There are many studies on the Cuk converter in the literature. By referring some authors, they designed a PI-controlled converter for photovoltaic panels. Fuzzy logic controllers’ method was used to determine PI parameters.
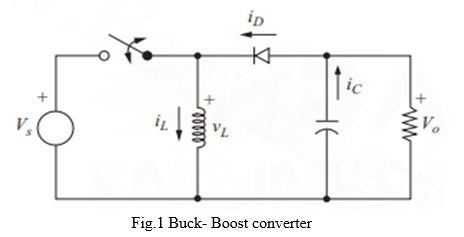
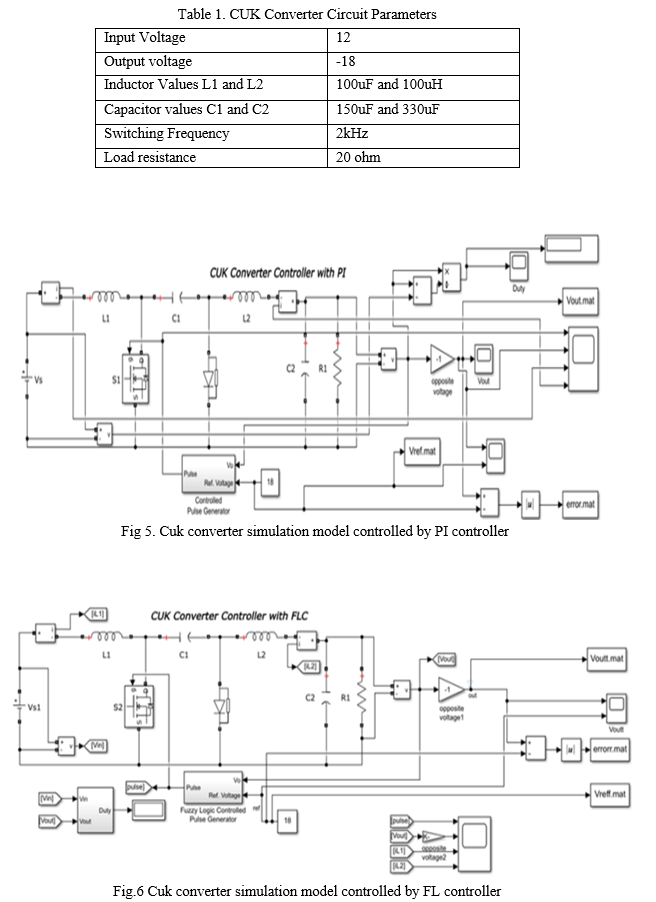
A. Circuit Diagram
The input voltage is given to converter here the converter used are buck-boost and cuk converter. Then the converter output was given to load [7-8]. The output voltage is varied depending upon load whenever load change, gate pulse width is varied and given input signal to converter. Based on the ON- OFF time of converter switch, output voltage is varied and settles down for reference voltage. The Fig. 1. shows the block diagram of converter.
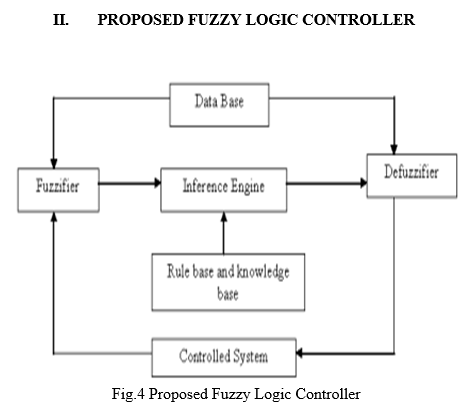
With the aid of a design professional, Fuzzy logic controller improves conventional device design. With fuzzy logic, robust mathematical modelling in control processes can be greatly reduced. A human operator can monitor a process much more efficiently than a controller based on modern analytical techniques. In recent years FLC's implementation of fluid set theory has become popular. A fuzzy set is a subset of sets where only two separate values, 0 to 1, are inferred by the membership function (MF) values. The following is a fuzzy package. A fuzzy set A in discourse universe U is defined by a member function A(x) which at the interval of A measures member status [0, 1] and at that interval associates A(x) number with each element x of U. Fuzzy logic regulation is seen as actual physical structure and logic. 6 concerns all four of the main parts of (1) fuzzy source code, (2) knowledge base, (3) engine inference, and (4) difluence.
A. Fuzzification
Fuzzification can be defined as the conversion of a fuzzy set to a fuzzier set or crisp sets to a fuzzy set.
B. Knowledge Base (KB)
The basis of knowledge consists of the meanings and the control rules that describe when, how and why you apply the fuszy control rules, of the fuzzy MFs for the input and output variables. A database and language rules base are included in the framework. 1. The database serves as a reference for language control principles and pointless data processing. 2. The basic rule is structured to identify control goals and controls for domain experts through a set of language rules.
C. Inference Mechanism
Decision making on pen and paper using a set of fluid if then rules like:
IF X = A = Y = B = B = C. The linguistic values for x, y and z, a, b, and c represent two variables of input and one variable of power. It is a cornerstone of an FLC, capable of simulating human existence, including its decision making on the basis of furious logic and the rules of inference of furious logic. Generally speaking, fuzzy sets are mapped to a pair of outputs, the laws between the two systems.
D. Defuzzification
Defuzzification is used to measure linguistic dependent numerical values. In this study, the centre method was used. (1) A mapping scale that translates the input value range to the output variable set of values. (2) Difluence, an approach to differentiate between non-fuzzy control behaviour and a fluctuating control operation.
III SIMULATION RESULTS
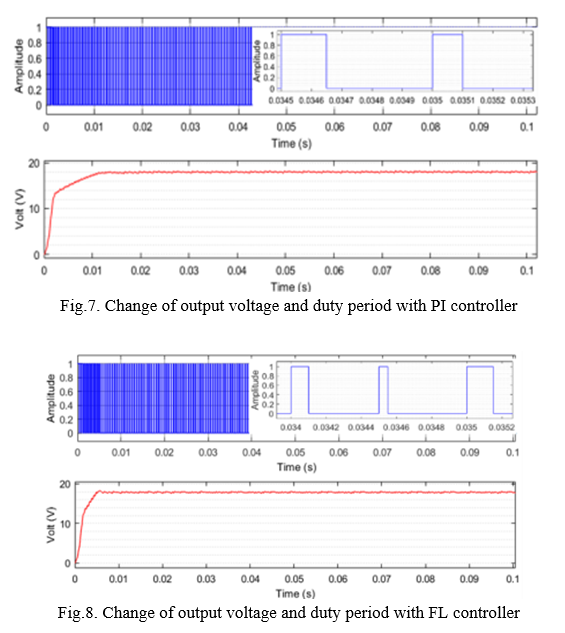
The change of output voltage and duty period with PI controller is applied to Cuk converter and shown in Fig 7 and the change of output voltage and duty period with FL controller is presented in Fig 8. In addition, if the PI controller is applied, the output voltage error graph is shown in Fig 9. Similarly, the error plot of the voltage at the converter output in FL controller is shown in Fig 10. A visual comparison of the output voltages obtained when both controllers are applied to the Cuk converter circuit is presented in Fig 11.
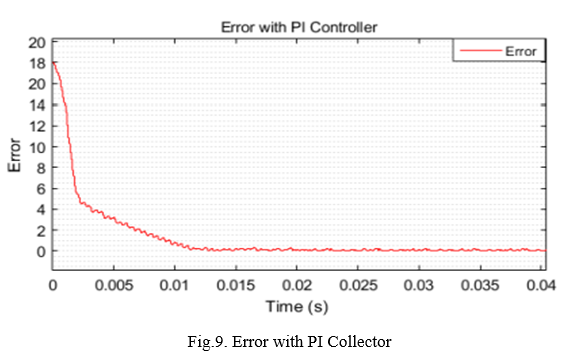
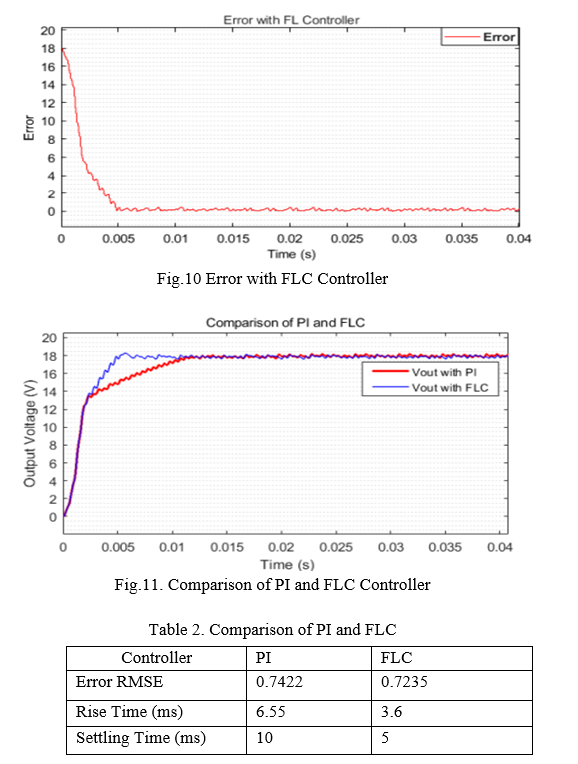
In Fig 7, it was observed that the Cuk converter output voltage reached a reference value of 18V after 10 ms without overshoot. In Fig 8, it is observed that the Cuk converter output voltage reaches a reference value of 18V after 5 ms. In Fig 9, it was observed that the error reached 0 after 10 msec when the PI control method was applied and when the FL control method was applied in Fig 15 the error reached 0 after 5 msec. In Fig 11, it is observed that FL control method gives better results than PI control method.
IV. COMPARISON OF SIMULATION RESULTS OF THE BUCK-BOOST CONVERTER USING FLC AND PI
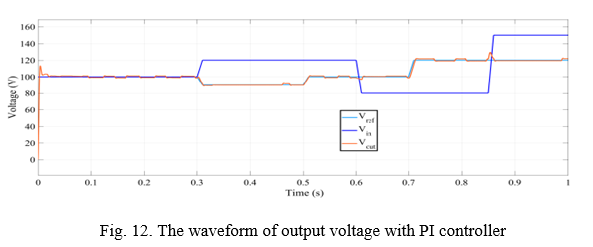
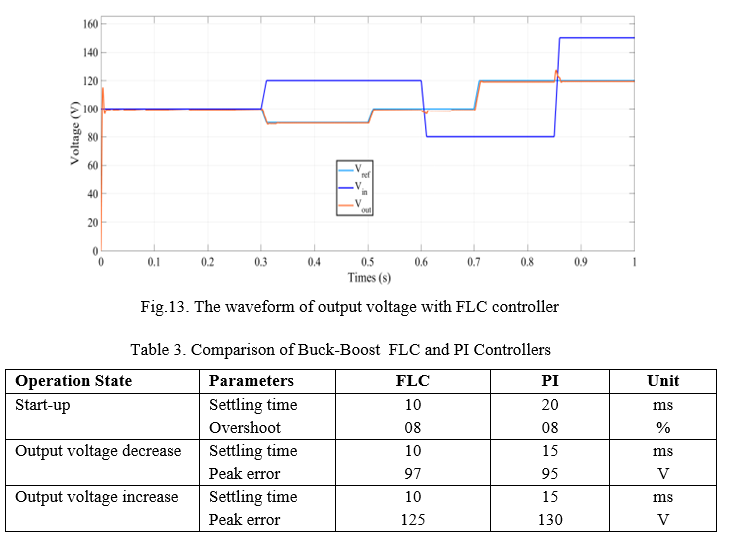
We can compare the responses of the converter reported in Fig. 12 and with Fig. 13, obtained using PI and FL controller, respectively: In particular, the FLC settling time was 10 ms less than PI at the nominal voltage of 100 V. Moreover, there was very little different overshoot at nominal input voltage using FLC during start up transient response, while there was high overshoot with PI with respect to an input voltage change. Additionally, a comparison between the voltage transient in Fig. 12 (FLC) and Fig. 13 (PI control) can be analysed when the load voltage decreased 10% (from 100 to 90 V): from the reported results, FLC method occurred to show a shorter settling time. Moreover, the maximum over-voltage resulted by the traditional PI application was greater than the related FLC error. In particular, the output voltage response presented oscillation with PI control during operation, while, in case of the FLC, the output voltage presented a good stability during operation. When the load voltage increased to 120 V, again a lower settling time was obtained by means of FLC with respect to PI control.
Table 3 compares the performance of FLC and PI control for the proposed DC/DC converter with respect to input voltage, considering the respective transient responses. By this comparison, the FLC results to have a transient response faster than PI, with negligible differences on overshoot during start up; additionally, load transient response is more stable. The reported results show the advantages of FL controller in terms of robustness versus input voltage and load variations with respect to linear PI controller.
References
[1] D. J. Arent, A. Wise, and R. Gelman, “The status and prospects of renewable energy for combating global warming,” Energy Economics, vol. 33, no. 4, pp. 584–593, 2011. [2] R. Adib, H. Murdock, F. Appavou, A. Brown, B. Epp, A. Leidreiter, C. Lins, H. Murdock, E. Musolino, K. Petrichenko et al., “Renewables 2016 global status report,” Global Status Report RENEWABLE ENERGY POLICY NETWORK FOR THE 21st CENTURY (REN21), 2016. [3] F. Grimaccia, M. Mussetta, and R. Zich, “Neuro-fuzzy predictive model for pv energy production based on weather forecast,” in Fuzzy Systems (FUZZ), 2011 IEEE International Conference on, 2011, pp. 2454–2457. [4] J. M. Alonso, J. Vina, D. G. Vaquero, G. Mart ˜ ´?nez, and R. Osorio, “Analysis and design of the integrated double buck–boost converter as a high- power-factor driver for power-led lamps,” IEEE Transactions on Industrial Electronics, vol. 59, no. 4, pp. 1689–1697, 2012. [5] H. M. Mahery and E. Babaei, “Mathematical modeling of buck–boost dc–dc converter and investigation of converter elements on transient and steady state responses,” International Journal of Electrical Power & Energy Systems, vol. 44, no. 1, pp. 949–963, 2013. [6] M. Ramasamy and S. Thangavel, “Photovoltaic based dynamic voltage restorer with power saver capability using pi controller,” International Journal of Electrical Power & Energy Systems, vol. 36, no. 1, pp. 51–59, [7] Mohan, N., Undeland, T. M., & Robbins, W. P. (2003). Power electronics: converters, applications, and design. John wiley & sons. [8] Rashid M. H, R. (2015). Power Electronics Devices, Circuits and Applications. London: Pearson Education. [9] Gupta, Yelamarthi & P, Sri. (2014). Analysis and Design of CUK Converter using PI Controller for PV Application. International Journal for Scientific Research & Technology. 2. 2321-613
Copyright
Copyright © 2022 Huliraja ., S. G. Srivani. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43154
Publish Date : 2022-05-23
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online