

Ijraset Journal For Research in Applied Science and Engineering Technology
Pick and Place an Object with Robot Gripper Using Arduino
Authors: K. Viraja, J. Mrudhuvani, S. Rushmitha, B. Likhitha
DOI Link: https://doi.org/10.22214/ijraset.2023.56462
Certificate: View Certificate
Abstract
This paper presents an automatic system that picks an object from one location and places it in another location. A rover features with special type of wheels called Mecanum wheels. A pre-defined path is designed, and the rover is programmed to move the rover in the desired path. The Arduino IDE software tool is used to write the program and the program is being dumped into the microcontroller. A gripper with two arms is used to pick and place objects that are functionally similar to a hand.
Introduction
I. INTRODUCTION
Advanced technology has made everything easier and more comfortable. Human efforts and involvement are being eliminated in their day-to-day activities. Automation has become an attractive feature in the industry and daily routine work. The use of robotic systems and technology to perform tasks without direct human intervention to lead a comfortable life is referred to as automation with robots. A system that reduces human work and human intervention to get more precise work and enable industries to use automated solutions with improved efficiency, reduced production costs, for lifting objects from one place to another is developed.
The significance of developing an Arduino-controlled pick-and-place system can have implications for a wide range of industries, including manufacturing, logistics, and healthcare. Arduino Uno provides real-time control capabilities, which are crucial for robots that require quick response to changing environmental conditions. To implement custom algorithms and logic for their robots, users find flexibility in programming Arduino which makes it suitable for a wide range of applications.
[1] In the 2019 publication titled 'Mobile Controlled Pick and Place Robot using Arduino' in the International Journal of Advance Research and Innovative Ideas in Education (IJARIIE) [112 p. ISSN(O)-2395-4396], D. R. P. Rajarathinam, R. Arunbabu, M. Danujan, B. Jasper Fernando, S. Vinoth Kumar, and T. Sethupathi have asserted that their proposed approach enables individuals without advanced technical skills to easily connect with a range of engineering robotic devices.
[2] In the 2001 paper 'Implementing a Robotic Arm for Object Manipulation Using Bluetooth,' published in the International Journal of Engineering Research & Technology (IJERT) [81 p. ISSN: 2278-0181], Anandh B A, Sakthivel R, and Shankar Ganesh explored the potential uses of a robot arm controlled via Bluetooth, including scenarios like the safe handling of explosives, the relocation of dangerous chemicals, and situations where human involvement is not feasible. Robots find their applications in many fields such as in the bottle filling industry, packing industry, food manufacturing industry, pick and place robots are designed and implemented.
II. WORKING PRINCIPLE
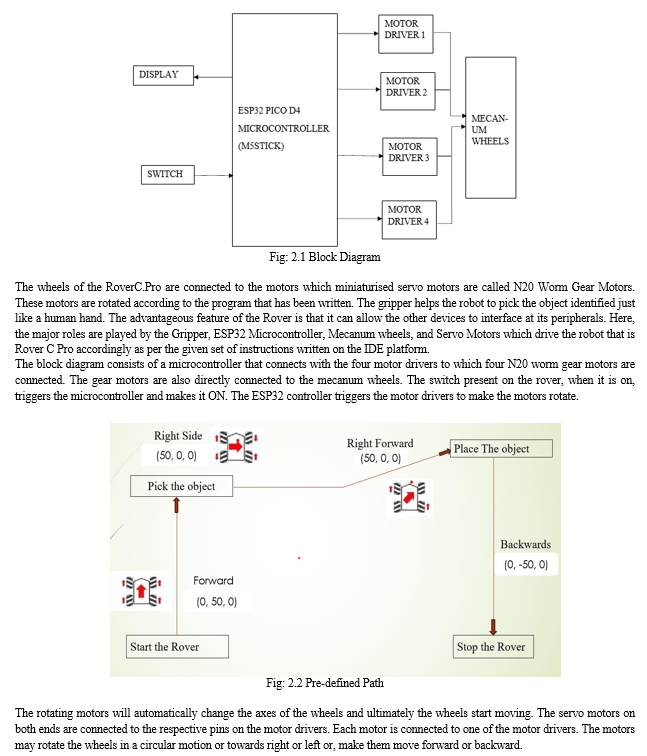
The mobile pick and place robot works on the principle of mechanics and forward & inverse kinematics. There is one such system created to provide flexibility for the movement of the robot in all directions. First, the path for the robot to move from one location to another location is to be decided. Later the robot is allowed to pick the required object for which the gripper is needed. For the robot to move in all directions we chose a model called RoverC.Pro comprises Mecanum wheels which allow the robot to move in all directions that is Forward, Backward, Sideways, Rotate on its axis, and so on. The directions in which the robot can move can be programmed as the model RoverC.Pro is a programmable device. The robot can be moved in the desired direction which may vary according to the user. The user can make changes to get to their target location. Since the RoverC.Pro is a programmable device, one can modify the program and commands using the platform ARUDINO IDE. The IDE platform includes certain libraries that are to be installed and the program is written, compiled, and run. The entire program written can be dumped into the microcontroller, which belongs to the ESP32 family series and an extended model of M5STACK. It follows the name M5STICK C PLUS.
Conclusion
In conclusion, the integration of RoverC.pro and Arduino Uno in a pick-and-place system represents a significant step toward accessible and affordable automation. We successfully designed and implemented a versatile system that showcases the potential of these platforms in real-world applications. The key takeaway from our project is the efficiency and adaptability of the pick-and-place system. It exhibited accurate object manipulation, which is crucial for manufacturing, logistics, and warehouse automation. By combining the mobility of RoverC and the computational power of Arduino Uno, we achieved a system capable of performing precise tasks with reliability. However, our project is not without its limitations. Further refinement is needed to enhance the system\'s robustness. Additionally, while we have demonstrated the system\'s scalability, customization for specific industrial needs will require further research and development. Future work should focus on optimizing the control algorithms, improving object recognition techniques, and expanding the system\'s capabilities to handle a broader range of objects and scenarios.
References
[1] Ritika Pahuja1, Narender Kumar (2012), “Android Mobile Phone Controlled Bluetooth Robot Using 8051 Microcontroller” International Journal of Scientific Engineering and Research (IJSER),324-329. [2] Van Delden, S.; Whigham, A. (2012) \"A bluetooth- based architecture for android communication with an articulated robot,\" Collaboration Technologies and Systems (CTS), 2012 International Conference on Robotics. [3] Design and Fabrication of Pick and Place Robot to Be Used in Library Anusha Ronanki. Vol. 4, Issue 6, June 2015 [5] Design Analysis of a Remote Controlled Pick and Place Robotic Vehicle B.O. Omijeh, RUhunmwangho and M Ehikhamenle. Volume 10, Issue 5 May 2014
Copyright
Copyright © 2023 K. Viraja, J. Mrudhuvani, S. Rushmitha, B. Likhitha. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56462
Publish Date : 2023-11-02
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online