

Ijraset Journal For Research in Applied Science and Engineering Technology
Pick and Place Robotic Arms Movement Controlled by Android Wirelessly
Authors: Cheepurupalli Krishna Chaitanya, Pillla Likhitha Sri, Ellapu Bhanu Prakash
DOI Link: https://doi.org/10.22214/ijraset.2023.56375
Certificate: View Certificate
Abstract
The paper describes the design and implementation of pick and place arm Robot and its movement Control by realization of the mobile application for the Android operating system which is focused on using wireless Bluetooth technology. Prototype of a mobile robot is necessary for the development of the application. In this paper, Graphical user Interface based touch screen operation in the Android Application acts as a transmitter and sends commands to the receiver to control the movement of the robot either to move forward, backward and left or right. We can also operate the Robotic arm like holding, releasing an object and movement of robot hand upwards and downwards etc. Here also in this application we have a interfaced an android phone as a prototype for wireless camera so that the person controlling it can view operation of the arm and gripper remotely. Four motors are interfaced to the microcontroller where two motors are used for arm and gripper movement of the robot while the other two motors are used for the body movement. The receiver end Bluetooth device is fed to the Arduino to drive DC motors via motor driver IC
Introduction
I. INTRODUCTION
The controlling of the Robot [5] movement and pick and place operation is done wirelessly through Android smart phone using the Bluetooth feature present in it. Here in the project the Android smart phone is used as a remote control for operating the Robot. The controlling device of the whole system is done through ATmega328 Microcontroller present in Arduino UNO Board. Microcontroller acts as an interface to the Motors, Bluetooth and Android mobile which has a Bluetooth present in the mobile. Bluetooth module receives data from Android smart phone and it feds that data as input to the controller. The controller acts accordingly on the DC motors of the Robot. In achieving the task, the controller is loaded with a program written using Arduino IDE Software.
In this paper, firstly related work is explained followed by hardware design and software design. Experimental results and conclusion is explained in the end of this paper.
II. RELATED WORK
Robots have their historical past though they came into existences in 1961. A. Che Soh, S.A. Ahmad, A.J. Ishak and K. N. Abdul Latif introduced a paper, “Development of an Adjustable Gripper for Robotic Picking and Placing Operation” in which adjustable gripper for robotic system is designed to identify the shape and size of an object which is needed in many applications especially for picking and placing operation [2]. The main objective is to design a robust gripper that can perform easier and faster picking and placing operation for multiple shapes and sizes objects. This adjustable gripper for robotic system can to improve the picking and placing operation in manufacturing field in producing more outputs without the needs to. P.S.Ramaiah, M.Venkateswara Rao, Raghu and G.V.Satyanarayana presented a system entitled “A Microcontroller Based Four Fingered Robotic Hand”. In this paper, design and development of a Four Fingered Robotic Hand (FFRH) using 8-bit microcontroller, sensors and wireless feedback is explained. The design of the system is based on a simple, flexible and minimal control strategy.
This system has 14 independent commands for all the four fingers open and close, wrist up and down, base clockwise and counters clockwise, Pick and Place and Home position to move the fingers. The tendering system of the double revolute joint mechanism and wireless feedback network provide the hand with the ability to confirm to object topology and therefore providing the advantage of using a simple control algorithm.
Finally, the results of the experimental work for pick and place application is enumerated. Author Girish Patel, and Devendra Chauhan introduced a paper entitled “SIFT Based Approach: Object Recognition and Localization for Pick-and-Place System”. In this paper, the system typically employs machine vision to analyze the scene, identify and locate the specified object and provide feedback to the robot arm for subsequent operations. For successful picking, the vision system needs to recognize the position and the orientation of the objects, the Scale Invariant Feature Transform (SIFT) is used for this purpose.
III. HARDWARE IMPLEMENTATION
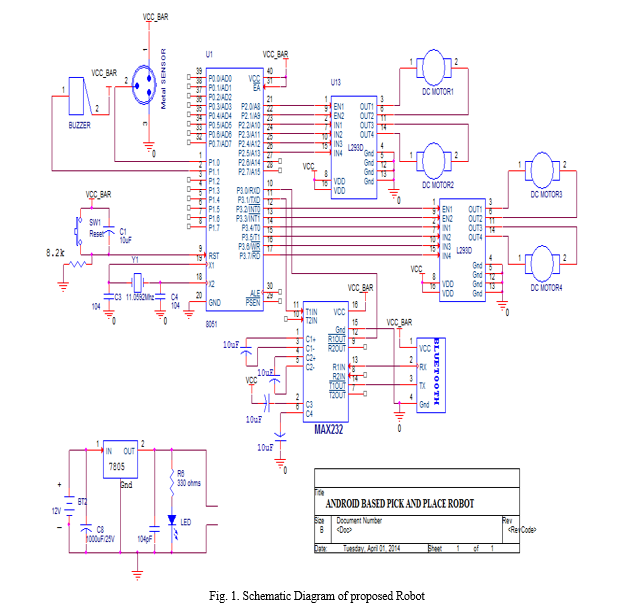
The hardware implementation of pick and place arm system consists of Arduino Uno, DC motor, Bluetooth, Motor Driver, Android application device and power supply. The block diagram of proposed method is shown in Fig 1.
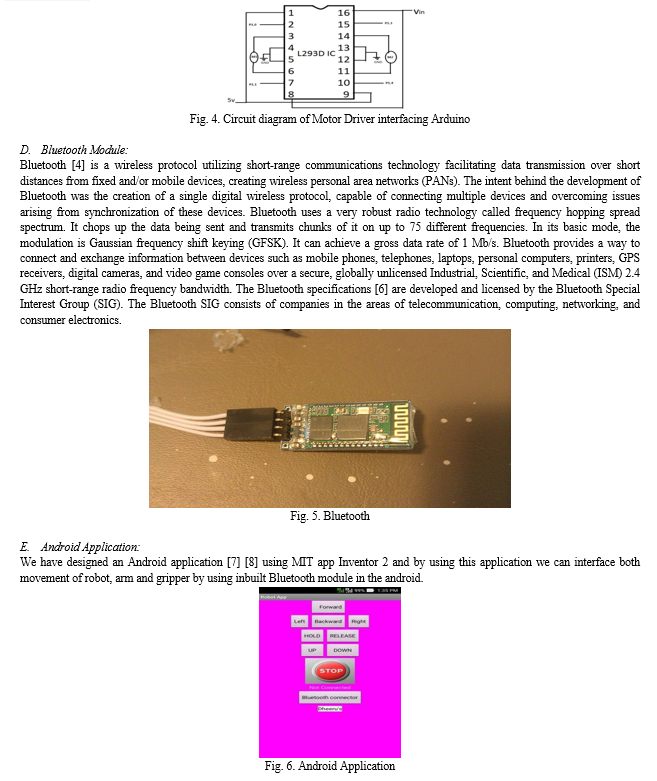
The Bluetooth in the mobile is connected to Bluetooth in the robot. After proper connection is established the commands in the application are sent to the robot through the graphical user interface in the application.
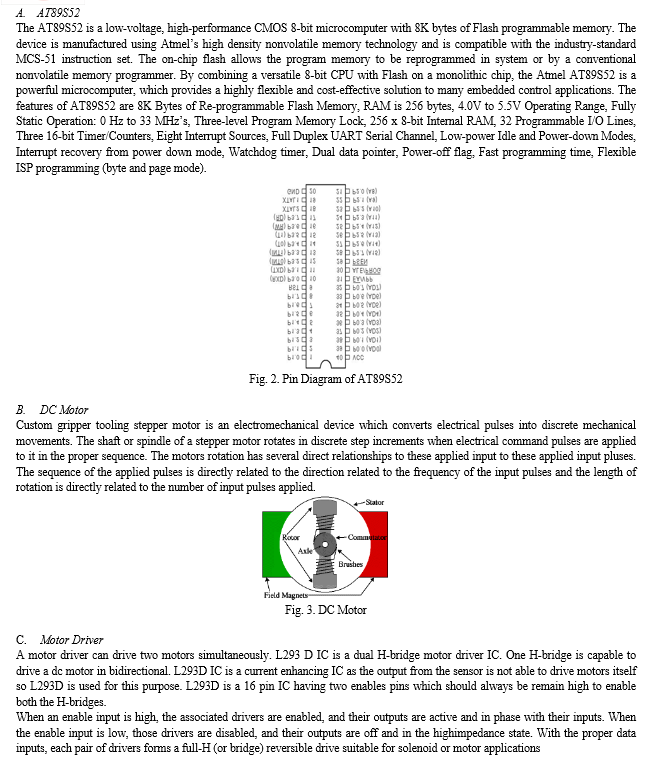
A smart phone Android operated robot. Now here is a simple to control your robot/robo car using Bluetooth module HC-05 and AT89S52 microcontroller with your android Smartphone device. The controlling devices of the whole system are a microcontroller. Bluetooth module, DC motors are interfaced to the microcontroller. The data receive by the Bluetooth module from android smart phone is fed as input to the controller. The controller acts accordingly on the DC motor of the robot. The robot in the project can be made to move in all the four directions using the android phone. The direction of the robot is indicators using LED indicators of the Robot system. In achieving the task, the controller is loaded with program written using Embedded ‘C’ Languages. Android smart phone controller Bluetooth robot using microcontroller.
It consists of an AT89S52 Micro controller IC, Bluetooth module, four DC Motors with driver IC and power supply. The pick and place robotic arm consist of a robotic arm placed on a moving vehicle. The vehicle is able to move along any type of surfaces irrespective of it is smooth or rough. It uses two motors for the operation and a belt type is attached to the vehicle like in the tanks, for the smooth and reliable operation. The pick and place robot uses four motors for the operation of the system, two for the operation of moving vehicle and two for the pick and place operation. The pick and place arm consists of an arm assembly with a jaw, which is only able to move in up and down direction. There are two motors are for the arm assembly, one for the up and down motion and other for jaw opening and closing. The maximum upward and downward motion is limited by a mechanical push button type switch. It breaks the motor circuit when the arm is at its maximum position beyond which the motor does not rotates.
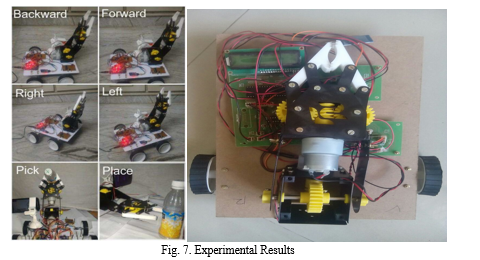
IV. EXPERIMENTAL RESULTS
When Arduino in the robot is connected to Bluetooth, the movement of robot can be controlled by sending commands through Android application. We have controlled the gripper movement i.e., If “Hold” is clicked in the application the gripper will be closed. If “Release” is clicked in the application the gripper will be opened. Arm movement is controlled If “UP” is clicked through the application the arm will moved up. If “Down” is clicked through the application the arm will be moved down. Robot moves forward if “Forward” is clicked in the application, moves Backward if “Backward” is clicked, moves left if “Left” is clicked and moves right “Right” is clicked.
At the transmitting end using android application device, commands are sent to the receiver to control the movement of the robot either to move forward, backward and left or right etc. At the receiving end four motors are interfaced to the microcontroller where two for them are used for arm and gripper movement of the robot while the other two are for the body movement. The android application device transmitter acts as a remote control that has the advantage of adequate range, while the receiver end Bluetooth device is fed to the microcontroller to drive DC motors via motor driver IC for necessary work. Remote operation is achieved by any smart-phone/Tablet etc., with Android OS; upon a GUI (Graphical User Interface) based touch screen operation. The main advantage of this robot is its soft catching arm that is designed to avoid extra pressure on the suspected object for safety reasons.
Conclusion
This paper presents working of Robot using Android technology for Pick and place operations Implementation of jammer to block RF communication in war field and have capability to transmit live video. Our project mostly useful for defense operations like bomb diffusion. Even though bomb is detected it is not easy to defuse by staying nearby. Our project is very useful in such that it can defuse the bomb by staying at safe distance. This system can further be developed by enhancing the performance and by adding more features.
References
[1] G Jegede Olawale, Awodele Oludele, Ajayi Ayodele, “Development of a Microcontroller Based Robotic Arm”, In Proceedings of the 2007 Computer Science and IT Education Conference pg: 549-557. [2] “Robotic Arm” - www.NASAexplores.com from Teacher Sheets pg: 1-2. [3] Datasheet of AT89S52 Microcontroller. [4] Datasheet of Bluetooth Module. [5] “Robot software” from Wikipedia, the free encyclopedia on 04-3- 2012 [6] Andren, Gerald B., “Robot Design Handbook, SRI International, Mitsubishi Electric Company 1998. [6] Picking up Operation of Thin Objects by Robot Arm with Two-Fingered Parallel Soft Gripper, Takashi Yoshimi, Naoyuki Iwata, Makoto Mizukawa and Yoshinobu Ando Proceedings of the 2012 IEEE International Workshop on Advanced Robotics and its Social Impacts, Technische Universität München, Munich, Germany, May 21 - 23, 2012. [7] Yeon-Gyunkim et.al. \"Smartphone-controlled user calling system for a mobile robot.\" Robotics (ISR), 2013 44th International Symposium on. IEEE, 2013. [8] Jegede Olawale, Awodele Oludele, Ajayi Ayodele, “Development of a Microcontroller Based Robotic Arm”, In Proceedings of the 2007 Computer Science and IT Education Conference pg: 549-557. [9] Raj Kamal, “Embedded Systems”, Pearson Education Publications, 2007. [10] R. Cassinis, G. Bianco, A. Cavagnini, P. Ransenigo, “Strategies for Navigation of Robot Swarms to Be Used in Landmine Detection”, 1999 Third European Workshop on Advanced Mobile Robots (Eurobot’99). Proceedings IEEE, pp. 211-21 [11] J. Veganay, “Outlier Rejection for Autonomous Acoustic Navigation”, Proceedings of the 1996 IEEE International Conference on Robotics and Automation.
Copyright
Copyright © 2023 Cheepurupalli Krishna Chaitanya, Pillla Likhitha Sri, Ellapu Bhanu Prakash. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56375
Publish Date : 2023-10-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online