

Ijraset Journal For Research in Applied Science and Engineering Technology
Plucking Flowers using Soft Robot
Authors: Mrs. N. Krishna Jyothi, B. Neha Kiran, S. Vignya Sharma, N. Kavya, G. Sujitha Rani
DOI Link: https://doi.org/10.22214/ijraset.2023.56490
Certificate: View Certificate
Abstract
Soft robotics is a subfield of robotics that concerns the design, control, and fabrication of robots composed of complaint materials, instead of rigid links. In contrast to the rigid-bodied robots built from metals, ceramics, and hard plastics, the compliance of soft robots can improve their safety when working in close contact with humans. The main objective of this project is to pluck flowers using a soft robot. The proposed system is designed to provide gentle manipulation of flowers in a horticultural setting. The soft robot is composed of flexible and deformable materials, such as silicone or elastomer, and is designed to mimic the motion and compliance of human fingers. The system is implemented and tested in a real-world scenario, and the results show that it can effectively pluck flowers without causing damage or injury to the plant. The proposed approach has potential applications in the floriculture industry, where the system can improve efficiency and reduce labour costs, while also minimizing damage to the flowers.
Introduction
I. INTRODUCTION
Soft robotics, an emerging subfield of robotics, has revolutionized the way it perceives and interacts with machines. Unlike traditional rigid-bodied robots, which are constructed from stiff materials like metals and plastics, soft robots are crafted from compliant materials, offering a host of unique advantages. These robots are designed to be flexible, adaptable, and safe, particularly when operating near humans. This project delves into the realm of soft robotics, aiming to harness its potential by addressing a specific application: plucking flowers.
The central objective of this endeavour is to develop a soft robotic system capable of delicately and efficiently plucking flowers within a horticultural context. By capitalizing on the intrinsic compliance of soft materials, this system seeks to emulate the finesse and gentleness of human fingers during the plucking process. The result is a technology that could revolutionize flower harvesting by minimizing damage to the plants while maximizing productivity
At the core of this project lies the soft robot itself, a creation composed of materials like silicone or elastomer. These deformable materials enable the robot to mimic the intricate motion and flexibility exhibited by human fingers. The robot's design, control, and fabrication processes are meticulously orchestrated to ensure it can navigate the delicate task of plucking flowers without causing harm. The real-world implementation and testing of this innovative system validate its effectiveness. Through rigorous trials, it has been demonstrated that the soft robot can successfully pluck flowers the realm of floriculture, offering a solution that streamlines operations, reduces labour costs, and preserves the quality of the harvested flowers.
II. LITERATURE SURVEY
"Biologically-Inspired Soft Robot for Grasping Delicate Objects with Flexible 3D- Printed Fingers" : Soft robotics is regarded by scientists as a discipline that is advancing spectacularly year after year due to its ability to provide a variety of viewpoints within and outside of the robotics sector.
Remarkably, the area of soft robotics— which didn't even exist as a word until 2008—has grown over time, with over 1000 scholarly papers listed in databases like Web of Science (WOS) and Scopus by 2022. Baoetal's review included a number of topics pertaining to the development of soft robots.
The nascent nature of the subject of soft robotics, along with its openness and lack of dogmatic constraints regarding manufacturing, modeling, and application domains, may give rise to many ambiguities or confusions. One of these has to do with how soft robotics is defined. Numerous writers offer definitions of soft robotics based on their study in the specialist literature that has been examined, but the field has not yet come to a consensus on a description that addresses the question of what soft robotics is. For this reason, several definitions are compiled in this work to provide both junior and experienced researchers with a viewpoint on the subject at hand.
"Soft robots are primarily composed of easily deformable matter, such as fluids, gels, and elastomers that match the elastic and rheological properties of biological tissue and organs," is the first definition that fits this description.
"We define soft robots as systems capable of autonomous behavior and which are primarily composed without inflicting any damage or injury to the plants. This of materials with modules in the field of soft biological materials," breakthrough showcases the potential applications of soft robotics in state Rus et al.
A "soft robot is appropriately named when the stresses it is subject to cause it to deform prior to damaging the class of objects for which it was designed (whether it be human or cantaloupe); we acknowledge that traditional robots can be thought conducted a scientometric analysis of studies published between 2010 and July 2021 (also from the WOS database) using a number of domain-specific keywords. This review is another that approaches the of as soft when interacting with a harder object, such as a diamond," field of soft robotics from a quantitative perspective.
After obtaining according to another definition provided by Panagiotis Polygerinos et al. Additionally, the following is provided: "The field of soft robotics studies how to leverage an object's or a material's softness or a system's softness to build a robot by meeting a requirement for both the robot's environment and its recipient." Liyu Wang et al. have provided another definition of soft-matter robotics, which is defined as the study of manipulating or exploiting soft matter's deformation to accomplish robotic tasks. The inspiration source, material, high compliance, and high deformability of soft robots are shared characteristics among these definitions of soft robotics. Taking into account the aforementioned definitions, one that incorporates every aspect found can be suggested. A general 10504 results from the search, the researchers examined elements that were similar to those in the Bao et al. analysis. CiteSpace was used to create co-citation network maps in that paper. Laschi et al.'s graph, which shows the evolution of the number of scientific publications, is another example. Their study was based on publications from 2004 to 2016 and the Scopus database.
III. METHODOLOGY
There are several steps involved in the methodology for plucking flowers with a soft robot, a Esp32 microcontroller, a soft modular gripper, and a serial Bluetooth app. Make sure the soft robot has the flexibility and accuracy needed to pluck delicate flowers by first definition of soft robotics might be as follows: it is a developing area designing and assembling it with the modular gripper attachment of robotics that primarily takes inspiration from biological systems and makes use of materials with coefficients in the soft materials range that have high and continuous deformability in order to accomplish particular robotic functions.
Many reviews that address the field and concentrate on various specialized application areas or reviews have been published in the soft robotics literature over the years in an effort to provide a thorough and accurate picture. The current paper addresses the need for centralization and offers an updated perspective on the accomplishments of recent years by creating a comprehensive view of the field, in light of the recent acceleration of the growth of scientific publications.
This work is an attempt at a hybridization of two different analysis categories. In the first section of the paper, a bibliometric analysis is conducted in which the evolution of the number of scientific publications from 2008 to July 2022 is identified along with a publication analysis that takes into account factors like the most productive articles, journals, countries, and authors in this field, as well as the most cited scientific articles. Because there were so many articles to review, the second section of the paper examines the state of the art in the field of soft robotics from July 2022 to 2018 and selects articles using a well-defined methodology that is carried out in two stages.
Other reviews with bibliometric or scientometric analyses of soft robotics have been found in the literature, taking into account the first portion of the research. Using this tool, authors can map the evolution of the number of scientific publications over time in different fields in a relevant way.
The first known bibliometric analysis in the field of soft robotics was carried out by Bao et al. They used a variety of field-relevant keywords to retrieve data from the WOS database for studies published between 1990 and May 2017, which led to the selection of 1495 review and research articles. Several different aspects were analyzed in that paper, including those pertaining to productive countries, international collaborations, universities, journals, productive authors, and research areas that contributed to the field. Yitong Zhou et al.
Next, program the Esp32 microcontroller to regulate the gripper and robot's movement. Commands were given to open and close the gripper using a serial Bluetooth app. This method, which relies on manual guidance through the Bluetooth app instead of sensors, is a creative and useful approach for soft robotics applications in horticulture or agriculture.
IV. WORKING
A. Block Diagram
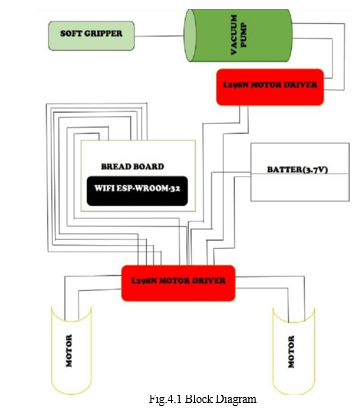
In the schematic layout, the pivotal component is the ESP32, human hand while ensuring the safety and well-being of the plants. which serves as the project's central control unit. The architecture These robots have potential applications in agriculture, horticulture, incorporates two motor drivers, each playinga distinct role. The first motor driver interfaces with the vacuum pump, generating the requisite pressure for facilitating the gripper's motion. The second motor driver interfaces with the motor and wheels, enabling the robot's forward and backward locomotion. Poweris harnessed from the battery source, which is seamlessly routed to the motor driver. Additionally, the vacuum pump is seamlessly linked to the gripper mechanism, which undertakes the delicate task of plucking flowers. This comprehensive setup underscores the ESP32's pivotal role in orchestrating gripper, locomotion, and power management, thereby realizing a cohesive and efficient flower-plucking solution.
Plucking flowers using soft robots involves the use of flexible and compliant robotic systems that can mimic the delicate and precise actions of a human hand. These soft robots use a combination of materials and mechanisms to achieve the desired task.The core component of the soft robot is the gripper or end effector. It is designed with soft and compliant materials, such as silicone, rubber, or elastomers, to mimic the dexterity of a human hand
The gripper is often equipped with multiple fingers or petals that can deform and conform around the target object, in this case, a flower. This design allows for gentle and precise manipulation Soft robots are typically equipped with sensors, such as cameras or force sensors, to perceive the environment and locate the flowers. Vision systems or machine learning algorithms can be used to identify and locate the flowers.
Before plucking a flower, the soft robot needs to plan its movements. This involves calculating the optimal path and trajectory to reach the target flower while avoiding obstacles. Once the soft robot has identified a flower and planned its approach, it uses its soft gripper to gently grasp the flower's stem. The compliant nature of the gripper ensures that it doesn't damage the flower. The gripper closes around the stem of the flower and applies a controlled amount of force to pluck it from the plant.
Feedback control mechanisms ensure that the robot can adjust its grip and force as needed. Force and position sensors on the gripper provide feedback to the robot's control system to prevent overexertion or damage to the flower. After plucking the flower, the soft robot can perform any required post-processing tasks, such as sorting the flowers, arranging them, or packaging them for transport. To prevent accidental damage to the flowers or the robot itself, safety measures can be implemented. This may include collision avoidance systems, emergency stop buttons, or human oversigh. Soft robots can be autonomous, guided by pre- programmed algorithms and sensors, or they can be operated remotely by a human operator who monitors and controls the robot's actions.Overall, soft robots designed for flower plucking combine advanced materials, sensors, and control systems to delicately and precisely interact with flowers, mimicking the capabilities of a and other fields where gentle manipulation of delicate objects is required.
V. RESULT
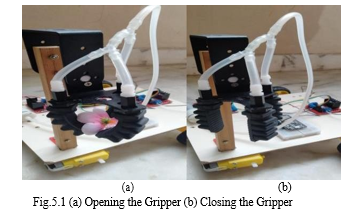
- Opening the Gripper: The ESP32 microcontroller sends a signal to the soft actuator to pressurize or activate it. .
- Closing the Gripper: When the ESP32 instructs the soft actuator to close the gripper, it pressurizes or actuates the actuator in a different manner.
In the experimental setup for plucking flowers utilizing a soft robot equipped with an Esp32 microcontroller, a soft modular gripper, and by using serial Bluetooth app several noteworthy observations were made. Despite the absence of dedicated sensors, the robot demonstrated impressive adaptability and precision in grasping and plucking the flowers.
Conclusion
In conclusion, the application of soft robots in the realm of flower plucking marks a significant step forward in the field of automation. The ingenious use of compliant materials in the gripper design underscores the delicate touch that soft robots can bring to tasks traditionally handled by human hands. This gentle yet effective approach ensures that the flowers are plucked with precision, minimizing bruising and damage that could occur with conventional mechanical methods. The soft gripper\'s adaptability to different flower shapes and sizes showcases its versatility, enabling it to cater to a wide array of plant species. The implications of employing soft robots in flower harvesting extend far beyond mere convenience. The potential to reduce labour costs and increase productivity within the floral industry could revolutionize the way flowers are cultivated and brought to market. By streamlining the plucking process, these robots could significantly contribute to economic efficiency and sustainability, as they reduce the need for extensive manual labour and subsequently cut down on the associated resource consumption. The application of soft robots aligns with the evolving global focus on environmentally conscious practices and resource optimization, making it a compelling solution for the floral industry\'s future. The future scope of the flower-plucking soft robot project is promising and multifaceted. Building on the foundation of delicate flower harvesting, the project can expand into agricultural automation by incorporating advanced sensing technologies and machine learning algorithms for autonomous navigation, real-time plant assessment, and selective harvesting. This evolution could revolutionize the efficiency and sustainability of agricultural practices, reducing labour demands and enhancing crop yield.
References
[1] Mir Sajjad Hussain Talpur, Murtaza Hussain Shaikh. Automation of Mobile Pick and Place Robotic System for Small Food Industry. IEEE Digital Library.978-1-4577-1139: pp. 522- 526, 2012. [2] Mohamed Naufal bin Omar,” Pick and place robotic arm controlled by Computer”, Universitite knika Malaysia, Melaka April 2007 [3] Anusha ronanki, m. Kranthi, “Design and fabrication of pick and place robot to be used in library”, international journal of innovative research in science, engineering and technology, Vol. 4, Issue 6, June2015, DOI:10.15680/IJIRSET.2015.0406056. [4] J. Shintake, V. Cacucciolo, D. Floreano and H. Shea, \"Soft robotic grippers\", Advanced materials, vol. 30, no. 29, pp.1707035, 2018. [5] M. Carmel, \"Soft Robotics: A Perspective-Current Trends and Prospects for the Future\", Soft Robotics, vol. 1, no. 1, pp. 5-11, 2014. [6] A. Ainla, M. S. Verma, D. Yang and G. M. Whitesides, \"Soft rotating pneumatic actuator\", Soft robotics, vol. 4, no. 3, pp. 297- 304, 2017. [7] F. Iida and C. Laschi, \"Soft Robotics: Challenges and Perspectives\", Procedia Computer Science, vol. 7, 2011. [8] Chen, Y.; Guo, S.; Li, C.; Yang, H.; Hao, L. Size recognition and adaptive grasping using an integration of actuating and sensing soft pneumatic gripper. Robot. Auton. Syst. 2018, 104, 14–24. [9] N.Kastor, V. Vikas, E. Cohen and R. D. White, \"A Definition of Soft Materials for Use in the Design of Robots\", Soft Robotics, vol. 4, no. 3, pp. 181- 182, 2017. [10] Yu, Y.; Zhang, K.; Yang, L.; Zhang, D. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agric. 2019, 163, 104846. [11] Hohimer, C.J.; Wang, H.; Bhusal, S.; Miller, J.; Mo, C.; Karkee, M. Design and field evaluation of a robotic apple harvesting system with a 3D-printed soft-robotic end- effector. Trans. ASABE 2019, 62, 405–414. [12] Wang, Z.; Kanegae, R.; Hirai, S. Circular Shell Gripper for Handling Food Products. Soft Robot. 2020.
Copyright
Copyright © 2023 Mrs. N. Krishna Jyothi, B. Neha Kiran, S. Vignya Sharma, N. Kavya, G. Sujitha Rani. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56490
Publish Date : 2023-11-03
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online