

Ijraset Journal For Research in Applied Science and Engineering Technology
Pole Climbing Robot for Fire Fighting and Metal Detection
Authors: A. Gowri Prasad, G. Tulasi, Kalla Lokesh, Ch. Geetanjali, Kalivarapu Lokesh, B. Rohini, Dr. B. Siva Prasad
DOI Link: https://doi.org/10.22214/ijraset.2023.57771
Certificate: View Certificate
Abstract
A new pole climbing robot mechanism is proposed and the structure and features of the mechanism are demonstrated. The robot\'s processes of pulling the pole, dropping the pole, active work, climbing the pole, fixing the pole and passing obstacles were analyzed. The main idea obtained by the pole climbing robot was explained in detail and the control system of the pole climbing robot was established. The analysis shows that the mechanism has features such as compact structure, easy control and efficient movement.
Introduction
I. INTRODUCTION
Over the past few years, climbing robots have attracted the research of many researchers as they can replace workers working at high altitudes in dangerous, labour-intensive and cheap working environments. Currently, researchers have developed many types of pole climbing robots to climb vertical poles, curved poles or branch poles. Episode Scientists also built robots that will climb pipe-like rods [2]. Another important task that has recently been considered for robots climbing poles is the maintenance of lighting poles, maintenance of poles on roads and power transfer. At present, climbing robots are mainly used in high altitude operations.
In 1980s, developed countries such as the United States and Japan have successively carried out research work on pole climbing robots. Since 2000, some domestic universities and research institutes have successively carried out pole climbing robot research work, and achieved certain research results. In 2003, Michigan State University used vacuum adsorption technology to design a kind of lightweight adsorption pole climbing robot called Flipper [4]. It weighs only 35 grams on its feet and has a suction cup with a diameter of 40 mm. In 2005, Waseda University successfully developed the WOODY-1 tree climbing robot, which uses the alternating motion of two ring-shaped clamps to move the robot up and down the tree. Spanish researchers have developed a pole-climbing robot based on the Stewart-Gough parallel platform. The robot is equipped with four sets of clamping mechanisms for radial clamping and loosening of the body. This can be done with one degree of freedom in the position and orientation of the robot. In 2007, Iran developed a pole-climbing robot called UT-PCR. The driver's computer measures and controls the forward and reverse rotation of the three sets of wheels [6]. The robot can move up and down relative to a stick-shaped object, but simply sliding the wheels makes the crawler robot unstable. In 2008, Yooreum Yoon and Daniela Rus of MIT developed a robot called Shad-y3D, which uses the body's three degrees of freedom to allow the robot to move flat at any angle on a truss and complete a transitional climb. 3D Truss
II. LITERATURE SURVEY
A. “A Comprehensive Survey of Pole Climbing Robots”
In this paper on pole climbing robot for firefighting and metal detection briefly explains about the advantages and drawbacks of various common pole climbing robots from two perspective modes, external source, climbing structures respectively [1]. It depicts the pole climbing advantage of stable motion and simple control and it’s drawback to overcome obstacles. Finally, this paper concludes that it is unrealistic to concentrate all the advantages on a single robot product to accomplish all the tasks and at present pole climbing robots can only combine certain advantages according to specific needs to accomplish given tasks.
This paper presents a pole climbing robot that is build to climb a pole, which is 1m in height. Robot uses a gripper to climb highest end of the pole and back to the ground [2]. A microcontroller Arduino Mega 2560 is used to control and analyze the movement of the robot. Electrical components such as 12V linear actuators are sufficient for the motor driver to complete the task, According to this research paper. The average speed of the robot is 1,437cm/sec.
B. “Development of a Simple Pole Climbing Robot”
This article introduces a pole climbing robot designed to climb 1 m high poles. The robot uses a gripper to climb to the highest point of the column and then returns to the ground [3]. An Arduino Mega 2560 microcontroller is used to control and analyze the robot's motion.
According to the study, electrical components such as 12V linear actuators are sufficient for the motor drives to complete the task. The average speed of the robot is 1437 cm/sec.
C. “Pole Climbing Robot”
In this article, we introduce a 3D climbing robot that can climb the curves and branches of a 3D model and explore the entire area of the model [4] This article describes a patented robotic pole climbing system developed for use by Metropolitan Police and forensic investigators to investigate outdoor accidents, particularly those involving motor vehicles. The system is based on DC motors and works with an Android control circuit using Bluetooth technology. The idea here is that using only motors helps reduce the cost and size of the circuit.
D. “Design and Fabrication of Wheeled Pole Climbing Robot With high Payload capacity”
In this paper, we proposed a pole climbing robot based on pairing the robot with an Android and transmitting the corresponding Arduino commands to the embedded system along with a Bluetooth module [5]. This design uses a 30 rpm DC motor with high torque for greater gripping force. This will help the robot securely grip the pole so that it is stable at the top of the pole height. In this study, we use an Android application with an IP camera for security purposes.
E. “Electrical pole Climbing Robot” for Wiring and Repairing Distribution Lines”
In this study, we proposed a pole climbing robot that can climb poles. An important aspect of this design is that no motor is used to climb the pole. However, many robots are still based on motor mechanism. Using DC motors without power at higher altitudes can lead to fatal situations. The study proposes the usage of pneumatic cylinder to grip the pole.
F. “Implementation, Path planning and Control of Pole Climbing Robot”
This article presents a project using pole-climbing robots to connect distribution lines that has attracted widespread interest [6]. The robot has two bionic mechanical arms consisting of a crawling guide mechanism, a self-locking drive mechanism, and a transmission mechanism, and can adapt to guide rods of different diameters within a certain range.
III. WORKING PRINCIPLE
The proposed pole cum path following robot works on the principle of linear motor, which is partially autonomous.
This robot works under the control remote mechanism, It plays an important role in different types of day to day issues that includes serving as a security for electric pole repairers, .by verifying the short circuit using fire detection sensor etc.
The working of this project is as follows, Initially the control of this robot is based on automatic remote control and operates with the help of remote and gets started.
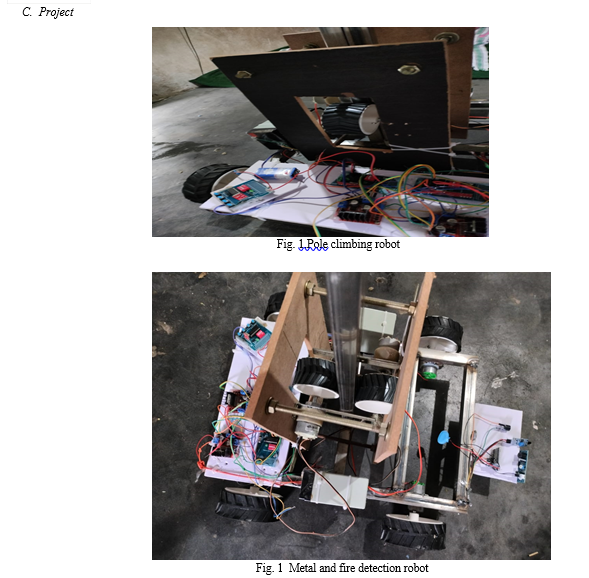
There are two robots one for the purpose of path following, and another for pole climbing and ensures the automatic fire detection metal (Bomb) detection if any possibility both on the ground as well as on the pole i.e. for long heights. This project can also be implemented for the purpose of painting walls even on further installation of the hardware.
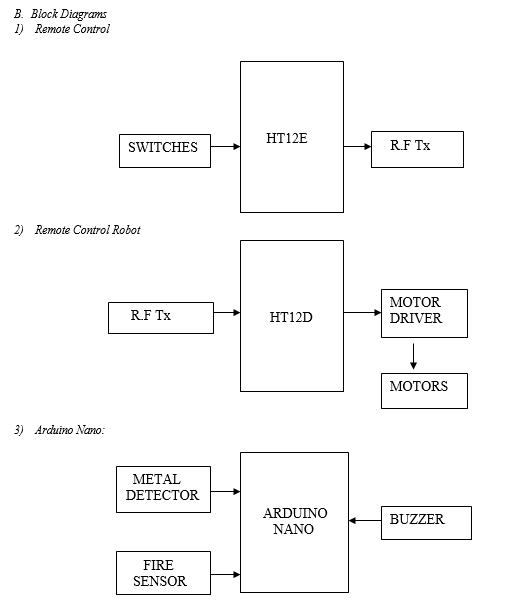
A. Hardware Description
- Fire Sensor: This miniature infrared flame sensor receiver module, ignition detection module is compatible with Arduino and can be used to detect flame or light source wavelengths in the range of 760-1100nm, and can also be used to detect lighters from a distance of 80cm. The detector is sensitive to a narrow range of radiation, around 4.4 microns, which is the dominant range of radiation from hydrocarbon fuel fires. Additionally, solar radiation in this range is absorbed by the Earth's atmosphere, making IR flame detectors solar-blocking devices. Single frequency detectors use pyroelectric sensors that respond to changes in infrared intensity. It is also equipped with a low-pass filter that limits the response to frequencies associated with flashing fire. In response to the detector's fire signal, the detector's electronic circuit produces an output signal.
- Inductive Proximity Sensor: The LC Circuit, which consists of L1 (coil) and C1, is the main metal detector part of the circuit. With the help of this LC Circuit, which is also called as Tank Circuit or Tuned Circuit, the TDA0161 IC acts as an oscillator and oscillates at a particular frequency. When the LC circuit detects any resonating frequency from any metal which is near to it, electric field will be created which will lead to induces current in the coil and changes in the signal flow through the coil . Variable resistor is used to change the proximity sensor value equal to the LC circuit, it is better to check the value when the coil is not near any metal object. When the metal is detected, the LC circuit will have changed signal. The changed signal is given to the proximity detector (TDA 0161), which will detect the change in the signal and react accordingly. The output of the proximity sensor will less than 1mA when there is no metal detected and it will be around 10mA (usually greater than 8mA) when coil is near to the metal. When the output pin is high, the resistor R3 will provide positive voltage to transistor Q1. Q1 turns on, the LED lights up (not shown) and the buzzer sounds
- L293D Motor Driver: The L293D is a dual full-bridge driver that can be used to control the direction and speed of two DC motors. The device has two input channels and can drive motors with a current rating of up to 1.5A. It also has three differential enable signals that can be used to simplify motor control in robotics and other applications
- Arduino NANO: The Arduino Nano is a small, versatile microcontroller For example, this paragraph begins with a level-3 heading.
IV. ACKNOWLEDGMENT
It will be a pleasure for us expressing my deep sense of gratitude and sincere thanks to our Guide and Head of the Department of Electronics and Communication Engineering, Dr B. Siva Prasad, M. Tech, Ph.D Associate Professor of N S Raju Institute of Technology, for his excellent guidance and enthusiastic encouragement in motivating us to take up this challenging task. Especially the extensive comments, the discussions, and interactions with him had a direct impact on the final form and quality of this thesis.
Conclusion
In conclusion, the pole climbing robot with firefighting and metal detection capabilities offers a valuable solution for various industries. Its ability to climb poles efficiently allows for quick and effective inspection and maintenance tasks, while the firefighting feature ensures enhanced safety in high-risk environments. Additionally, the metal detection function adds an extra layer of security by identifying potential hazards or hidden objects. Overall, this versatile robot proves to be an invaluable asset in improving efficiency, safety, and productivity in a wide range of applications.
References
[1] Yu Song , Yanxi Mao Zeyu Li, ”A Comprehensive Survey Of Pole Climbing Robots” IEEE International Conference on Mechatronics and Automation, August 7-10,Guilin ,China 2022. [2] Junxian Leong, Khairul Amin Abu-Johan, Nur Iffah Nasuha Kadir Wan Fuad Wajdi Othman Aeizaa Azmaan A. Wahab & Syed Sahel Nazil Alhady ”Development of a Simple Pole Climbing Robot” IEEE Intelligent Manufacturing and Mechatronics.20 June -2021. [3] Ankur Sinha, Department of Mechanical Engineering,”Pole Climbing Robot”. JETIR January 2019, volume 6 ,Issue 1-2019.Galgotias University, Yamuna Express highway, Greater Noida,UttarPradesh.-2019. [4] Sohail Khan and S Prabhu “Design and Fabrication Of Wheeled Pole Climbing robot with high Payload capacity” ICAME-2nd International Conference On Advances in Mechanical Engineering, Materials Science and Engineering-2018. [5] Zahra Bakhtiar Khalid, Md Hasib Ullah, razu Ahmed, Zakir Hasan Choudhary, Imrul Kaish and Md. Khaliliur Rhaman ”Electrical Pole Climbing Robot” for Wiring and Repairing Distribution Lines ICCIT-18 the International Conference on Computer and Information Technology,December-2015. [6] T.Mahmoud,Design ,implementation, Path planning ,and Control of Pole Climbing Robot”, University of Coimbra, Faculty of Science and Technology ,Department of Electrical and Computer Engineering,Coimbrca,July-2010.
Copyright
Copyright © 2023 A. Gowri Prasad, G. Tulasi, Kalla Lokesh, Ch. Geetanjali, Kalivarapu Lokesh, B. Rohini, Dr. B. Siva Prasad. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET57771
Publish Date : 2023-12-27
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online