

Ijraset Journal For Research in Applied Science and Engineering Technology
Radio-Controlled Submarine using a Water Bottle with an Integrated Camera
Authors: Chinmay ., Bhavesh Saxena, Astha Gupta
DOI Link: https://doi.org/10.22214/ijraset.2023.51763
Certificate: View Certificate
Abstract
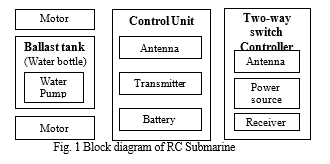
We aim to make a wireless remote-control model of a submarine whose motion can be controlled from outside of the water with the help of a transmitter and receiver. Today, RC (radio-controlled) submarines can be used for underwater surveillance. The project is cost-optimized and uses readily available parts. The most important thing in an RC submarine is the control system and waterproofing of the electronic components. The key components of the control circuit are the ESC, radio control module, and propeller motor. Direction control uses servo motors to navigate the surface unit. The ballast tank is a PVC water bottle of cylindrical shape. Building a control system for the ballast system is a major challenge for this project. Circuits are sensitive and prone to interference. The submarine can be controlled with a remote control, and an onboard wireless camera can broadcast underwater scenes.
Introduction
I. INTRODUCTION
To cover the aquatic, RC submarines are used. The submarine design and specification depending on the operation of the submarine. For deep water monitoring, the submarine can stand pressure and the control system can handle the long-range under the water. RC submarines have been extensively used in ocean exploration, artificial operations, military, and industrial applications. The wide range of applications has resulted in the development of hundreds of Subs with a variety of shapes, sizes, working depth limits, sources of energy, means of propulsion, and ways of control. In the last few years, underwater vehicles have known an increasing interest in the research industry. The manned underwater robotics systems play an important role, which realized different missions at the sea bottom, for example, maintenance and monitoring cables, pipelines, and offshore structures collect and inspecting different biological surveys. Underwater vehicles divide into two basic categories: manned underwater vehicles and unmanned underwater vehicles (UUVs) or autonomous underwater vehicles (AUVs). The unmanned undersea vehicle is a self-propelled submersible whose operation is mainly fully independent or under minimal control. The unmanned vehicle is divided into tethered (ROV) or non-tethered vehicles (AUV). The difference between an AUV and a remotely operated vehicle (ROV) is whether there is a direct wired connection (for communication and/or power) between the vehicle and the surface. However, AUVs can also connect to surfaces for direct communication via acoustic modems, RF, or optical. In a simplified ROV a camera mounted in a waterproof case which can manage thrusters attached to the surface by cables, transmitting video signals and telemetry information. ROVs can be fundamentally classified as open-frame designs or closed-frame designs ROV. The open frame structure has stable movement with 3 degrees of freedom based on a wide meta-center. this type of structure has several additional benefits. This structure is well-known and widely used.[1] Most ROVs. This is convenient for large loads. You can easily inspect and clean your equipment. Attach to or detach from the body. However, the ROV of this design More than three degrees of freedom are required. Because of these advantages and disadvantages, the open frame design is mainly applied to general duty ROVs. According to all these we design a RC submarine.
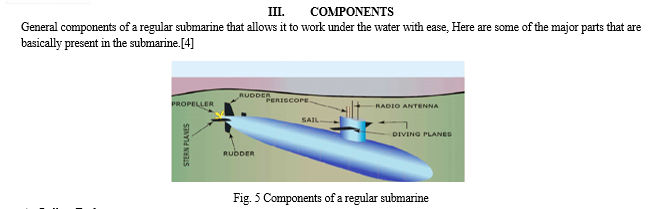
A. Ballast Tank
They are embedded at either end of the submarine. They allow submarines to submerge. When the seawater fills up, the submarine goes underwater and vice-versa.
???????B. Pressure Hull
The hull housing all living quarters, weapons, weapons control systems, communications and control center, batteries, and main and auxiliary mechanisms is a rigid hull. They are called pressure hulls because they are designed to withstand hydrostatic pressure at the submarine's maximum operating depth.
???????C. Diving Planes
It controls the movement (like diving) of the submarine in the water. With the help of diving planes, it is possible to dive the submarine under the water in an efficient manner.
???????D. Rudders
It helps in steering the submarine under the water. With the help of the rudder, we can move the submarine in the left or right direction as per requirement.
???????E. Engine
The primary objective of the engine is to move the submarine under the water, other than that it is also responsible to power up all the equipment present in control unit like communication systems, batteries, etc. [5]
To make an RC submarine we should follow the basic functionality of the typical submarine and according to this, we are going to choose the desired alternatives that make it more sustainable and cost-effective as well, by understanding the regular submarine underwater dynamics we replace it with the desired entity which are listed below.
???????a. Water Bottle as BALLAST TANK
For the ballast tank — We need a hollow cavity structure i.e. why we use the water bottle, in this case, because its structure is very similar to a submarine and it is easily available.
???????b. BLDC Motor as ENGINE
For the engines — In submarines, there are diesel engines but in the case of RC submarines, it is replaced by a BLDC motor which is powered by a lithium-ion battery of the required voltage.
It is connected to the submarine body with the help of T-joints.
???????c. Propeller as the PRIME MOVER
For direction —To navigate the submarine under the water propellers came into action it provides, forward and backward thrust for the movement of the submarine.
???????d. Water pump to TRANSFER WATER
For Elevation/height control —
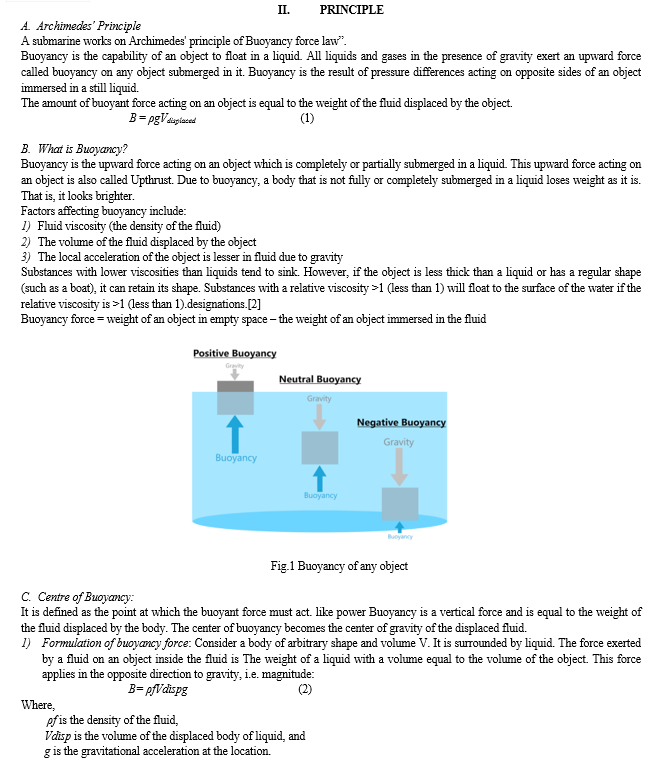
To achieve the desired height inside water we need to understand the concept of Archimedes’ principle of buoyancy.
To move the submarine downwards we need to fill the ballast tank with water and vice-versa
???????e. Transmitter & Receiver
For Communication: Tx & Rx used —
To communicate submarine which is present underwater we use radio signals to control the submarine movement remotely
In this project, we used 433MHz Tx & Rx
???????f. Wi-fi Camera
To view the underwater bodies —
The captured images and videos from the camera can be watched on any mobile device.
It also allows underwater surveillance like inspection and research
Table i: Specification of Components Used
|
S. No. |
Technical Specification |
||
|
Components |
Specification |
Quantity |
|
|
|
Battery |
12V 09V |
3 1 |
|
|
BLDC Motor |
3500 rpm |
2 |
|
|
Propellers |
3 blades of 1.5’’ |
2 |
|
|
Transmitter & Receiver Unit |
Relay module Tx & Rx 438MHz PCB Components: Voltage reg. IC 7805 Transmitter IC 12E Receiver IC 12D Relay |
1 |
|
|
Pump |
Voltage: 3 ~ 6V Current:130 ~ 220mA Flow Rate: 80 ~ 120 L/H |
2 |
|
|
PVC pipe |
Flex PVC |
- |
|
|
Bottle |
1L |
1 |
|
|
Camera |
Wi-fi enabled |
1 |
IV. PROCESS OF MAKING THE SUBMARINE (WORKING AND OPERATION)
Firstly we take a regular water bottle of 1 liter. The reason why we choose the water bottle is that if we compare it with a regular submarine there is a ballast tank that has a hollow cavity. A water bottle has a similar structure as compared to a conventional submarine that’s why we used a water bottle as a ballast tank in our project.
Ideally, we found that a water bottle is the best option which acts as a ballast tank in our project also water bottle is an economical and easily available product in our day-to-day usage because of those reasons we found that a water bottle is the best option for the ballast tank For the movement of the submarine under the water, we have used two high-speed DC motors which are connected to either side of the water bottle body with the help of a PVC L-connector which is fixed by hot glue.
A propeller is a rotating fan-like structure that is used to propel the submarine by using the power generated from the battery and then transmitted by an electric motor which is the main engine of the RC submarine.
The transmitted power is converted from rotational motion to generate a thrust that mediates momentum to the water, resulting in a force that acts on the ship and pushes it forward.
- It is more economical than other types of blades.
- Provides good speed characteristics.
- Acceleration is better than other types.
- Low-speed control is not very efficient
The water pump is placed inside the water bottle. The main function of a water pump is to insert or exert the water from the water bottle. The water pump helps in maintaining the submarine’s depth inside the water.
The pump is used to transfer the water out from the ballast tank for the submarine to rise. We fill the water in the ballast system that we're making using a water bottle.
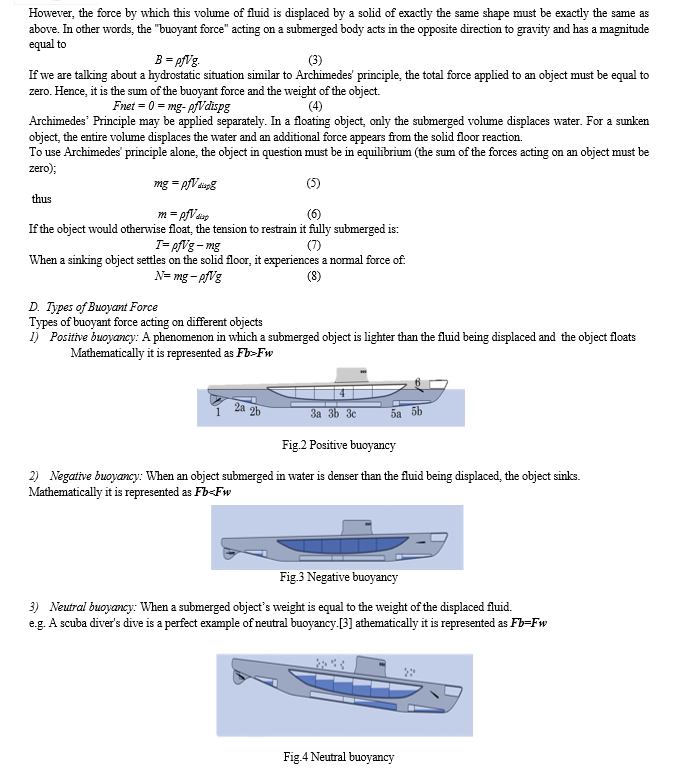
By using pumps, water can be blown out from the ballast tank, causing them to be light. This creates positive air pressure in the ballast and thus the buoyancy increases. When the buoyancy of the submarine exceeds neutral buoyancy the submarine rises in the water.
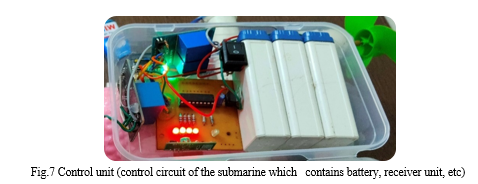
The control unit contains a transmitter, receiver, and battery unit. We have used an RF module in our project because it has more versatile than IR, RF module transmits and receives data. RF transceiver modules always work in pairs. Radiofrequency varies according to medium to medium. There is some reduction in signal strength in water as compared to air. Communication underwater is a challenging problem, so selecting a capable Rf module that can easily communicate signals underwater.
Sending and receiving data requires a transmitter and a receiver. 433MHz FM RF transmitter module has a transmission range of up to 300m.
Transmitter Operation shows how the orders (commands) are transmitted by the transmitter of the control unit to remotely control the moving components of the submarine model. The integration of these orders facilitates the correct operation of the submarine model.
We can control the operation of a submarine by using a remote. The remote we have used is a two-way switch remote because it can be easily operated. It is calibrated in such a way when we press the up button the motor starts rotating in the clockwise direction and similarly when we press the down button the motor starts rotating in the anti-clockwise direction.
When both motors are rotating in a clockwise direction a forward thrust is applied to a submarine which provides forward motion to the submarine and vice-versa.
To turn the submarine under the water both motors rotates in opposite direction i.e. one motor rotates clockwise and another rotates in the anti-clockwise direction and vice-versa.

V. PROBLEM STATEMENT
The problems we have faced during the implementation of this project are stated below.
- Main problem that we faced is to make our whole system watertight. We resolve this problem by using hot glue sealing on all the holes and joints.
- Problem to change the direction of the motor which is connected to the ballast tank this is resolved by calibrating the transmitter and receiver with remote operation
- We had to accurately measure the volume of our submarine and make its weight accordingly.
- Last problem is to arrange all our components (motors, ballast tank, battery, etc.) permanently into a shell.
- Balancing the body of the submarine underwater, for this, we have to confirm the center of mass of the submarine’s body.
VI. APPLICATIONS & FUTURE ADVANCEMENT
A. Applications
- Used in military operations
- RC submarines are used to deploy on the coasts to keep an eye on enemies.
- They can be used to find blockages in drains.
- Can be used to keep a tab on the life of organisms in rivers & seas.
- Can be used to do underwater wildlife photography.
- It reduces human risk at high sea levels since we know that the increase in depth also increases pressure on the human body.
- Earlier humans need to do underwater inspections manually which requires skilled people and require oxygen which leads to an increase in the overall cost of operation but due to the introduction of submarines, this factor can easily be resolved at a much cheaper cost of operation.
B. Future Advancements
Technological advancements can be done as per the requirements we need like: Using various sensors for measuring different aspects underwater, for example, pressure sensors, GPS, integration of VR (virtual reality), etc.
Integration of different types of sensors in the submarine for different purposes, some of the examples are:
- Pressure sensor: to know the pressure under the water
- Ultrasound sensor: to avoid the obstacle in the water
- Integration of GPS; to track the real-time position of the submarine
Other than sensors we can also improve the submarine the video recording capability of the submarine with the integration of VR (Virtual Reality). Integration of VR helps in better handling under the water.
Adding a Robotic arm to the submarine helps to grab the objects under the water. This can be helpful to the research department to collect the waterbodies sample and study about it.
In the long-range minimum control wireless mode (LRM), the real-time remote control is not supported therefore a control station is used to pilot the vehicle, and some relays are used to extend the communication range between the vehicle and the control station.
VII. RESULTS OF EXPERIMENT
This model of the submarine has propellers and a control surface to allow it to ascend, descend, turn, and move forward and backward. It is emphasized that the driven structure of the framework allows for the design of underwater vehicles of various sizes, propulsions, and power systems.
TABLE II: THE SPECIFICATIONS AND PERFORMANCE DATA MEASURED FOR THE SUBMARINE
|
S. No. |
Measured Data |
|
|
Vehicle Particulars |
Resultant |
|
|
|
Nose Length (front portion) |
70 mm |
|
|
Middle body length |
210 mm |
|
|
Tail length (end portion) |
130 mm |
|
|
Length Overall |
375 mm |
|
|
Maximum Diameter |
74 mm |
|
|
Length-to-diameter ratio |
5.06 |
|
|
Front surface area |
8 ft |
|
|
The total mass of the vehicle |
622 g |
|
|
Nominal speed underwater |
0.5 m/s |
|
|
Working depth underwater |
5.0 m |
Conclusion
The main objective of developing and implementing this project is to design a model for a small-scale, low-cost, and lightweight submarine to explore underwater life. This submarine can be controlled using a remote-control device and can broadcast underwater scenes using an onboard wireless wi-fi camera. This will be a locally-made submarine in which we opted for all the components which are easily available in our day-to-day life. With this, we have tried to minimize the overall cost. The submarine\'s design is derived only from renewable energy such as water or air. In a significant sense, only the propeller unit needs to drive. So, a low amount of energy is needed to drive this vehicle. Therefore, it is an effective design for the next generation.
References
[1] https://www.perlego.com/book/1835651/the-rov-manual-a-user-guide-for-remotely-operated-vehicles-pdf [2] Collar, P. G. et al. (1995). “Autosub: an autonomous unmanned submersible for ocean data collection,” Electronics & Communication Engineering Journal,Vol.7 issue3pp.105?114. [3] https://byjus.com/physics/buoyant-force/K. Elissa, “Title of paper if known,” unpublished. [4] https://commons.wikimedia.org/wiki/File:Submersible_diving_operations.svg [5] https://www.pittsfordschools.org/Page/20243 [6] https://www.marineinsight.com/naval-architecture/introduction-to-submarine-design/
Copyright
Copyright © 2023 Chinmay ., Bhavesh Saxena, Astha Gupta. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET51763
Publish Date : 2023-05-07
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online