

Ijraset Journal For Research in Applied Science and Engineering Technology
Remote Controlled Rover Using Rocker Bogie Mechanism
Authors: Nilesh Badgujar, Mohit Mahale, Shreya Dani, Tribhuvan Bharati, Prof. Iqbal Mansuri
DOI Link: https://doi.org/10.22214/ijraset.2022.41044
Certificate: View Certificate
Abstract
The rocker-bogie suspension system has robust capabilities to deal with uneven terrain because of it’s distributing the payload over its six wheels uniformly. Most of the cover designs have been developed for Mars and Moon surface in order to understand the geological history of the soil and rocks. Exploration operations need high speed and long distance traversal in a short mission period due to environmental effects, climate and communication restrictions In this research, a new suspension mechanism has been designed and its kinematic analysis results were discussed. One of the major shortcomings of current Rocker-Bogie rovers is that they are slow. In our project, we have focused on six-wheeled rocker bogie suspension system design which has advantage of linear bogie motion in protecting the whole system from getting rollovers during high- speed operations. This has greatly increased the reliability of structure on rough terrains and also enables its higher speed exploration with same obstacle height capacity as twice the diameter of wheel. The project aims to improve some basic working so that it can perform in a better way.
Introduction
I. INTRODUCTION
The rocker-bogie suspension system was initially used for the Mars Rover and is currently NASA’s preferred design for rover wheel suspension. The perfectly designed wheel suspension allows the vehicle to travel over very uneven or rough terrain and even proceed over obstacles. This rocker suspension is a type of mechanism that allows a six-wheel vehicle to constantly keep all six wheels in contact with a surface when driving on uneven terrain surfaces. The rocker bogie mechanism describes a method of driving a rover so that it can progressively step over most obstacles rather than impacting and climbing over them. Most of the benefits of this method can be achieved without mechanical modification to the same designs – only a change in control structure. Some machine changes are suggested to gather the maximum profit and to greatly increase the effective speed of future rovers. The rocker bogie mechanism is one of the most popular suspension mechanisms, which was initially designed for space travel vehicles having its own deep history embedded in its development.
II. PROBLEM DEFINITION
The Rocker-Bogie Mobility System was designed to be used at slow speeds. It is capable of overcoming obstacles that are on the order of size of a wheel and also use for survilliance. However, when surmounting a sizeable obstacle, the vehicles motion effectively stops while the front wheel climbs the obstacle. The rocker-bogie suspension system has robust capabilities to deal with uneven terrain because of its distributing of the payload over its six wheels uniformly, while there is one major shortcoming to high-speed traversal over the planar terrain. Here we aim to overcome the above mentioned issues.
III. LITERATURE SURVEY
1. Para Bimal Saraiya “Design of Rocker Bogie Mechanism” The proposed modification increases in the stability margin and proved with valuable and profitable contrasting the SSF metric with the 3D model simulations done on AUTOCAD. Study of the existing models of rocker bogie suspension enabled rovers and tried to manufacture a similar kind with the material available.
2. Roshan Sharma, Rajesh Jaiswal, Ankit Yadav, Subash Roy “Design and Fabrication of Rocker Bogie Mechanism Automated Combat Rover” The proposed paper presents a special design in seeking after of developing the rocker-bogie portability framework in customary overwhelming stacking vehicle conduct while high-pace traversal is required and to expand the battery effectiveness and working time of the Rover, which become made achievable the use of the autonomous directional control machine which utilizes least power modules organized upon the working condition and circumstance.
3. Rajat Murambikar, Vinay Omase, Vivek Nayak, Karan Patil, Prof. Yogesh Mahulkar “Design and Fabrication of Rocker Bogie Mechanism using Solar Energy” Infused solar energy generation, sun tracking and design characteristics to create a modern, more updated and less sophisticated version of Rocker Bogie Rover. Tested its abilities and finally reviewed and updated calculations.
4. Abhisek Verma, Chandrajeet, Yadav, Bandana, Singh, Arpit, Gupta, Jaya, Mishra, Abhishek, Saxena “Design of Rocker-Bogie Mechanism”. The proposed paper produces a novel design in pursue of increasing the rocker-bogie mobility system in conventional heavy loading vehicle behaviour when high-speed traversal is required. The proposed modification increases in the stability margin and proved with valuable and profitable contrasting with the 3D model simulations done in SOLIDWORKS.
IV. COMPONENTS OF ROVER
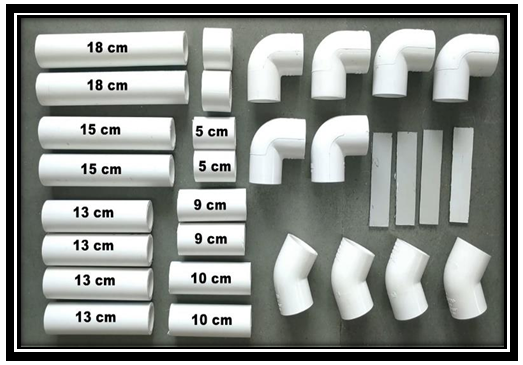
A. PVC Pipe
PVC Pipe is shown in fig.1 This Pipe have adequate strength, durability, easy installation, and low cost for making the body of rover.
B. Wheels
Wheels is shown in fig.2 This Wheel having Diameter 7 mm.

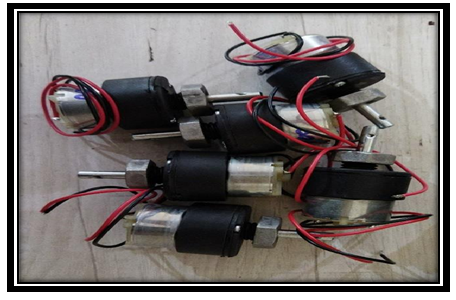
C. Motor
Motor is shown in fig.3. This is Geared DC Motor Having 100 RPM working on 12V Supply.
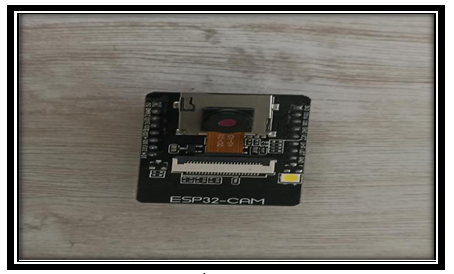
D. ESP 32 Cam Board With Camera module-:
ESP32 Cam Board Shown in Fig.4, This board contain the ESP32 Cam module with it.
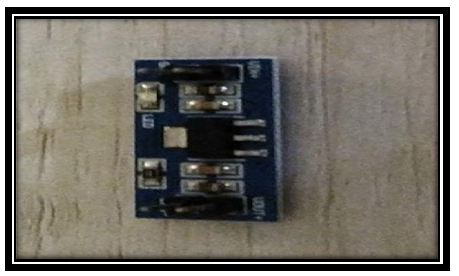
E. AMS 1117
AMS 1117 shown in fig.5. this module use to convert the 12V voltage into 5V voltage for camera.
F. Motor Driver
Motor Driver shown in fig.6, This is L293D Motor driver use to drive the six wheel motors of the rover.
G. Battery Pack
Battery is Shown in Fig.7, This is 12V volt Rechargeable Battery Pack use for rover.

V. METHODOLOGY
- The system uses ESP32 Cam Board as the microcontroller.
- The main reason behind selecting this microcontroller is it has inbuilt Wi-Fi which makes it suitable for IoT remote control and monitoring applications.
- It also has a camera slot and an ESP32 camera can be used on the rover.
- The rover uses L293D Motor Driver for driving all the motors connected to the rover
- Rocker Bogie type of suspension is used in the system so that the rover can be operated on off roads or more specifically it can be operated on any type of land.
- Blynk app is used for remote controlling of the robot as well as the camera video streaming from the robot can also be seen in the same app
- Since the Rover are connected to an app hence the rover can be controlled from app easily in less time and high efficiency.
VI. DESIGN OF ROVER

VII. RESULT
Testing the distance of controlling the rover through ESPCAM32 Cam Board is done 6 times by controlling the rover at a certain distance, whether ESPCAM32 Cam Board can accept the command or not. The test results can be seen in Table 1
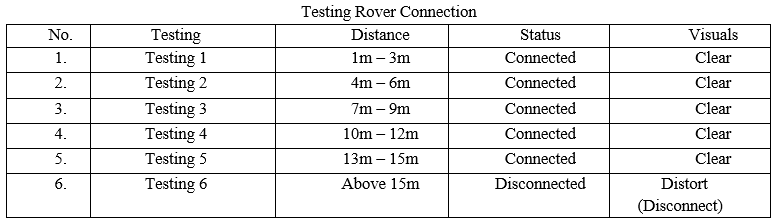
The test results in Table 1 can be concluded that the control distance from the surveillance rover can only be controlled with a maximum distance of 15 meters, if the control is carried out at a distance of more than 15 meters, the monitoring robot cannot run because the connection between the android smartphone and ESP32Cam Board has been lost. ESP32Cam Board testing is the basis for controlling rover. If the ESP32Cam Board has been successfully used, the next step is testing the IP camera on Rover.
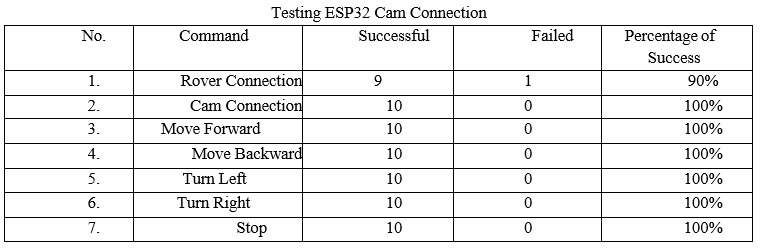
Overall testing of the system is carried out 10 times per instruction on Rover to ensure that rover can function as it should. The rover is used to perform all of its functions in accordance with the commands on the web browser that is packed on android app. Table 2 shows the results of overall system testing conducted by rover.
VIII. TECHNICAL DETAIL OF ROVER
- Total Length of Rover = 540 mm
- Total Width of Rover = 330 mm
- Total height of Rover = 210 mm
Weight of Rover = 2.09 kg
IX. FUTURE SCOPE
- This system can be configured to work on protocol other than Wi-fi.
- Other Mechanism for application Can be added in the system
a. SPY Operation
b. Rescue Operation
c. Surveillance Operation
3. Sensors can be incorporated in order to monitor an area under observation.
Conclusion
The proposed paper produces a novel design in pursue of increasing the rocker-bogie mobility system in conventional heavy loading vehicle behavior when high-speed traversal is required. The proposed modification increases in the stability margin and proved with valuable and profitable contrasting with the 3D model simulations done in SOLIDWORKS. In future, if the system installed in heavy vehicles and conventional off road vehicles, it will definitely decreases the complexity as well as power requirements to retain bumping within it Future scopes of Rocker Bogie Mechanism are in military operations as a weapon carrier & for locating coal deposits in coal mines.
References
[1] Para Bimal Saraiya, \"Design of Rocker Bogie Mechanism\", International Research Journal of Engineering and Technology (IRJET) 2020. [2] Roshan Sharma, Rajesh Jaiswal, Ankit Yadav, Subash Roy, \"Design and Fabrication of Rocker Bogie Mechanism Automated Combat Rover\", International Journal for Research in Applied Science & Engineering Technology (IJRASET) 2020. [3] Rajat Murambikar, Vinay Omase, Vivek Nayak, Karan Patil, Prof. Yogesh Mahulkar, \"Design and Fabrication of Rocker Bogie Mechanism using Solar Energy\", International Research Journal of Engineering and Technology (IRJET) 2019. [4] Abhisek Verma, Chandrajeet Yadav, Bandana Singh, Arpit Gupta, Jaya Mishra, Abhishek Saxena, \"Design of Rocker-Bogie Mechanism\", International Journal of Innovative Science and Research Technology 2017. [5] Chotten. J. E., 1992, “Simulation of a Six-Wheeled Martian Rover Called the Rocker- [6] Bogie”, M.S. Thesis, The Ohio State University, Columbus, Ohio [7] D. S. Chinchkar, Letal(January 2017). ”Design of Rocker Bogie Mechanism”, International Advanced Research Journal in Science, Engineering and Technology [8] Chinchkar DS, Gajghate SS, Panchal RN, Editors. 2017. Design Of Rocker Bogie Mechanism. IARJSET. AGTI’s. [9] Dedy Ashardi. 2015. Design and Build Room Monitoring Applications Through IP Cameras Using the Android Platform.
Copyright
Copyright © 2022 Nilesh Badgujar, Mohit Mahale, Shreya Dani, Tribhuvan Bharati, Prof. Iqbal Mansuri. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41044
Publish Date : 2022-03-27
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online