

Ijraset Journal For Research in Applied Science and Engineering Technology
Robotic Arm using Arduino Uno
Authors: Atharva Kulkarni, Shrinidhee Kulkarni, Ajay Kulsange, Shubham Mane, Deepak Munde
DOI Link: https://doi.org/10.22214/ijraset.2023.56864
Certificate: View Certificate
Abstract
As technology and innovation continue to improve, the development of human-like systems and methods is becoming more involved in business to meet the needs of people at a rapid pace. Such revolutions are carried out with the desire to simplify the people. This paper focuses on the development of an electro-mechanical robotic arm that attempts to pick and place and is operated or controlled through a mobile phone application via an Android smartphone. An electro-mechanical robotic arm designed to simulate pre-determined commands can typically move in four directions; left, up, down and right control in the angle defined by six servo motors and loaded with practical mobile phone features. Control of the designed and implemented robot arm is carried out using a mobile phone application through a Bluetooth module programmed through an Arduino UNO controller.
Introduction
I. INTRODUCTION
Robotic Arm is an electromechanical model that uses electrical parts, electronic parts and mechanical components. The mechanical part of the arm is connected by zero-joints. The Robotic Arm is programmable and has the same interaction as a human arm. The Rotary servo motor is controlled by a smartphone using an Android app.
Now the automation industry is growing rapidly in India. Automation may not be new, but combining robotic technology with automation has made it productive, easy, and cost-effective. It also eliminates potential business or dangerous and life-threatening items making the manufacturing process safer.
A. Project Method
Basic information about the possible design and the first robotic arm is done. Using SolidWorks is a desktop software used for planning, visual conceptualization, and feasibility studies to complete the design. Using 6 servo motors, the robot arm can move in different directions and hold or release objects with its handle. Arduino UNO controller is used to control the correct arm. These microcontrollers are used because they are cheaper and more suitable for beginners especially for programming. The program code is written in Embedded C, one of the most popular and mainstream programming languages. We have also created a smartphone app that will connect to the Arduino UNO microcontroller via a Bluetooth module. Control of the robot arm can be achieved using a smartphone app.
B. Recommendations
The test results show that the servo cannot perform complex operations due to several limiting factors. A successful pre-installation test showed that there were no communication problems between the robot arm and the smartphone. However, it failed after the installation test due to the powerful servo motor. A torque not less than MG995 servo motor is recommended to improve performance. Reducing the density of the prototype can improve overall usability. PLA (Polylactic Acid) is a material with a very high strength-to-weight ratio and can be easily produced by 3-D printing. Storing operations larger than five directions can also be a problem for an Arduino board. Although the code only takes 60%, the procedure together proves very taxing on the processor. A continuous operation module like HC-05 also contributes to the loss of CPU performance. As such, the Arduino Mega is recommended because it offers a faster processor than the UART and UNO R3.
II. LITERATURE REVIEW
Industry 4.0 is a new field where the combination of Internet of Things, software, sensors, processors and communication technology, along with cyber-physical systems, plays a major role in creating "things" to have the ability to provide information. and ultimately add value to the production process. (Mohd. Ayman et al., 2016).
Today, technology is developing in the same direction based on rapidly increasing human needs. Efforts to meet these needs make life easier every day, and this research focuses on learning robotic arms. (Rajashekar K et al., 2020).
Designing robots together with the latest navigation computing platforms is no longer a problem. In robots, navigation guidance guides the robot through its environment and is a general requirement for almost any mobile robot. (G. N. Coelho, 2008).
“Today's smartphone is equipped with many sensors for navigation purposes such as accelerometer, gyroscope, camera, GPS and Wi-Fi transmitter, and most of them are equipped with fast processors. (W.-W. Kao and B. Q. Hui, 2013).
Designers have a variety of options to choose internal sensors to create their robot navigation platform. Like using a smartphone
In this project, the robot can be controlled by a Bluetooth device using an android application, which can be interfaced to the control unit in the robot to feel the signal sent by the android application over a wide area. Before a few years ago, conventional practice operated using RF circuits with several limitations such as operating range, frequency range, and control range. By using a smartphone to control the robot, this limitation can be eliminated, it has more advantages such as reliable control, includes a large working distance, and the biggest advantage is long-term control. (Nick Firdaus, 2015).
From meaning to comparison; "Wi-Fi is a low-cost solution that covers short distances such as airports, hotels and conference venues." Of this, Wi-Fi has some limitations in providing a wide area solution, as infrared, WLAN, and Bluetooth technology can only provide a few devices within a short distance of Wi-Fi. (S. Tang, 2011).
.III. CIRCUIT DESIGN AND HARDWARE SELECTION
A. Arduino UNO R3
Although the microcontroller is commonly used in programming and software, the open source controller is the ATmega328P based microcontroller. Arduino UNO refers to a board equipped with analog and digital inputs or output points that can be connected to various circuits and expansion boards. Processing is written for non-programming users. Figure 1 shows the Arduino Uno R3 used in this project.
IV. CONSTRUCTION OF THE ROBOTIC ARM:
The design of the robotic arm is divided into two parts, the mechanical design and installation parts. In this project, hardware and software functions are combined to make the system productive and reliable.
A. Mechanical Design
The materials needed for the mechanical part of the robot arm were supplied and were drawn on SolidWorks in the form of an IPS unit. The robotic arm will have 5 outputs consisting of a base, handle, wrist, elbow, shoulder and waist. The robot has a combination of round and rectangular base capable of holding the Arduino UNO microcontroller and the body of the robot arm. 20 pt chipboard was used as the main material for the construction of the robot arm because it is easy to shape, cheap and can support the weight and movement of the motor. The robot's DOF ??mechanism is driven by two different types of servomotors. The robot gripper is also made of plastic fiber.
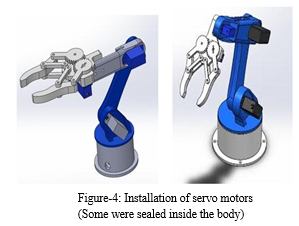
B. Mechanical Assembly
The robotic arm moves in 4 axes with 6 servo motors in a specified position according to the specifications of the mobile application.
The robot is designed to have a stationary base and a movable arm body with servomotors connected to move the arm. Each servomotor (6) is assigned as a joint of the robot arm, which then each corresponds to a mobile application, namely for; (s1) waist, (s2) shoulder, (s3) elbow, (s4) wrist, (s5) wrist span and (s6) grip. The assembly of the servomotors is shown in Figure 13.
C. Programming for Android
The Android app used in the project was created using App Invertor. App Inverter is a free unified web application development environment developed by Google and later developed by MIT. The mobile application was developed and created by dropping and dragging components into the design view and using visual block language to make the program application behave. In this section, many variables such as wrist spacing, wrist tilt, elbow, shoulder, grip, waist and arm speed are the design criteria.
V. RESULTS AND DISCUSSION
A. Project Method
Using SolidWorks is software used for visual conceptualization, planning, and feasibility studies to complete the design. Using 6 servo motors, the robot arm can move in different directions and hold or release objects with its handle. A single Arduino UNO controller board is used for optimal control of the robot arm. These microcontrollers are better to use because they are cheap. The program code is written in Embedded C, one of the most popular and mainstream programming languages. We also created a mobile application that will connect to the Arduino UNO (master) controller via the HC-05 Bluetooth module (slave). Controlling or guiding your hand will be done using a smartphone app.
Conclusion
The use of Arduino Uno to create a robotic arm shows the versatility and potential of this microcontroller in robotics manufacturing. It offers precise control, accessibility and customization options. This project demonstrates the interdisciplinary nature of robots and opens up possibilities for various applications. As technology advances, we can expect more advanced and innovative uses of Arduino-based robotic arms, promising a future where robots will continue to improve and simplify various tasks.
References
[1] G. N. Coelho (2008), Mobile Robot Navigation using Smartphones Extended Abstract. [2] Harish K, Megha D, Shuklambari M, Amit K, and Chaitanya K Jambotkar (2017), Pick and Place Robotic Arm Using Arduino. International Journal of Science, Engineering and Technology Research (IJSETR) Volume 6, Issue 12, December 2017, ISSN: 2278 - 7798 pp 1569 [3] Industry4WRD: The National Policy on Industry 4.0. Shaping The Future of Industry, (2018). Ministry of International Trade and Industry. Retrieve from https://www.miti.gov.my/miti/resources/Media%20Release/Media_Release__Industry4WRD_The_Nat ional_Policy_on_Industry_4.0_.pdf [4] Nik Firdaus (2015), Smartphone-Based Robot Control for Localization. Master’s thesis, University Tun Hussein Onn Malaysia [5] Rajashekar K, Hanumantha Reddy, Ruksar Begum T, Shaheena Begum, Syeda Ziya Fathima, Saba Kauser (2020), Robotic Arm Control Using Arduino. Journal of Emerging Technologies and Innovative Research (JETIR) June 2020, Volume 7, Issue 6 pp, 453- 455 [6] R. V. Aroca, A. P. B. S. de Oliveira, and L. M. G. Gonçalves (2012), Towards Smarter Robots with Smartphones in Robocontrol: Proc. 5th Workshop Appl. Robot. Autom., Bauru, Brazil, pp. 1–6 [7] S. Tang (2011), Performance analysis of an integrated wireless network using WiMAX as backhaul support for WiFi traffic,” - MILCOM 2011 Mil. Commun. Conf., pp. 1833–1837, Nov. 2011.
Copyright
Copyright © 2023 Atharva Kulkarni, Shrinidhee Kulkarni, Ajay Kulsange, Shubham Mane, Deepak Munde. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56864
Publish Date : 2023-11-20
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online