

Ijraset Journal For Research in Applied Science and Engineering Technology
Robust Pi Surveillance Robot
Authors: Anushree Deepak More, Rakshita Devendra Godiyal, Hiral Gachake, Ashwini Balaji Ghodake
DOI Link: https://doi.org/10.22214/ijraset.2022.41173
Certificate: View Certificate
Abstract
Remote surveillance of our house, as well as office areas, has become an important aspect. Human surveillance is achieved by moving (troop or equipment) personnel near sensitive areas to constantly monitor the area. But humans have their limitations, and deployment in inaccessible places is always impossible. We have developed a robot that can be used for video surveillance & monitoring which can be controlled through a GUI. Using this project, we put forward a surveillance robot with an Interface Board of the Raspberry Pi and Software to fulfill Real Time requirements. The Raspberry Pi Robot has a personalized digital device with peripherals such as Raspberry PI, LED lights, a Personalized Camera, Speaker for text to voice conversion and security or threat alarms, a range sensor, etc. The base controller of the robot will be the Raspberry Pi 3. A webcam attached to the Pi monitors the area with Live Streaming. The live streaming ability of the Pi allows the camera feed to be analyzed from any location using the internet. For detecting the obstacles we had used an ultrasonic range sensor along with it to give commands or pass on messages we have installed a speaker which will convert text to voice which is an E-speak technique. With such a system, every user will feel more safe, secure, and sheltered while they\'re not at their place of residence or when they\'ve left their kids and geriatric alone at home.
Introduction
I. INTRODUCTION
Robots are defined as mechanical devices that perform physical tasks using either man control or artificial intelligence. The considerable development in the fabrication of the processors and sensors makes the robots to be more intelligent. One of the important applications of robots is surveillance. Surveillance is the operation of monitoring humans, locations, and areas. In today's world, the robotics field is expanding exponentially and some of the popular robotics are used in industries, defense, academic, and research communities. The design and implementation cost of a robot is also very less. The manual surveillance system suffers from various challenges and two of them are:
- It is difficult for humans to maintain focus on monitoring.
- Continuous monitoring of multiple screens showing video streams from cameras is also challenging. Providing 24/7 monitoring requires guards to work in shifts, resulting in high costs. An automated surveillance system with a robot is proposed in this work to address these issues. During wartime, terrorist attacks, mass protesting movements it’s very important to have surveillance near and surrounding areas. In military scenarios adversary, location and territory are important security issues. Sensitive location areas can be covered with human soldiers so that they can monitor and observe the changes continuously. But humans have restrictions and organizing shifts in adversary areas can give a chance to the enemy to get advanced. A huge loss can happen in antagonist areas because of human faults. Robots can be grouped into different types according to their environment and mechanism of interaction such as mobile and fixed robots of which mobile robots can be further classified as aquatic, terrestrial, and airborne. Robots are being used in a variety of industrial applications for various activities like pick and place, painting, assembling of subsystems, and in dangerous places for material handling, etc.
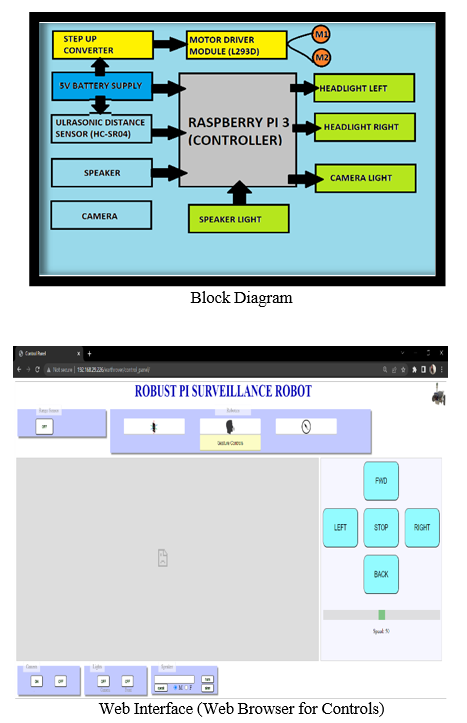
Nowadays robots in the use of surveillance are emerging because of their miniature size allowing them to enter tunnels, mines, and small holes in the building and also can survive in harsh and difficult climatic conditions for life long time without any defect and causing no harm. Video surveillance is the procedure of monitoring a situation, an area, or a person. This project’s main goal is to deal with robust situations where human beings cannot handle situations like darkness, entering slender and small places. Such hostile situation is occurring day by day in different parts of the world through natural catastrophes. The proposed system consists of two units mainly a robotic unit and a remote control unit. This designed system is connected to a remote computer wirelessly with which the whole controlling of the system response can be done. The project is also designed to work in an environment where visible light will not be available. The robot is developed in such a way that it can be used for video surveillance & monitoring which can be controlled through a GUI interface. The control mechanism is provided with a video transmission competence. The video transmission is practically accomplished through high-speed image transmission. Initially, the robot will be equipped with a camera that will capture the scenes and transfer the images to the server on which the user will be controlling and watching the live feed.
II. OVERVIEW OF SYSTEM DESIGN
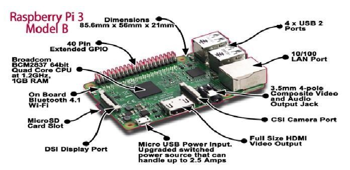
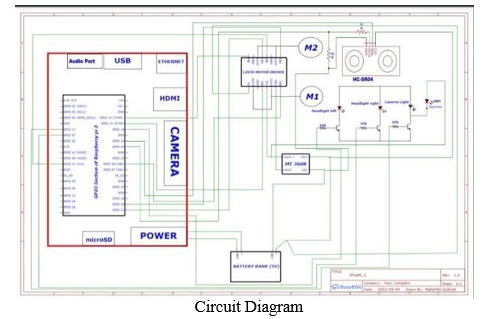
A. Raspberry Pi
This is the main processing element of the robot. Raspberry Pi comes in various models and form factors. This model has a relatively small form factor and requires less power to operate as compared to other models. It requires 5 V to operate and can be powered up using a common battery bank. It has a 40 pin GPIO section which can be utilized to interface with external peripherals.
B. Converters and Driver Module
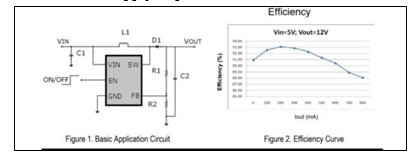
The MT3608 module is a low-cost DC-DC Step Upconverter that can step up a 2-24V input voltage to a 5-28V output at up to 2A. To make a robot, it is used to generate the 12 V DC supply required to drive the DC motors.
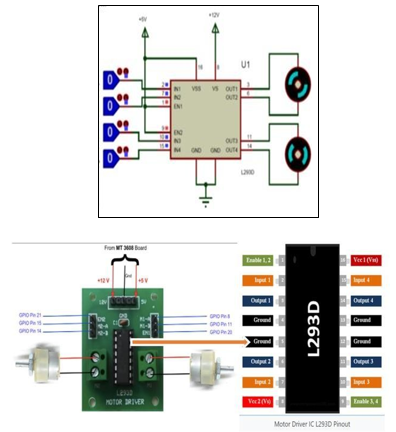
L293D Motor Driver Module is an expansion board of L293D IC. The board can drive up to 02 DC motors in both directions and at variable speeds. It can be interfaced with Raspberry Pi as shown below to make a robot. The direction of the motor is controlled by switching the logic on M1 and M2 pins. The speed of the motors can be adjusted by providing a suitable PWM signal at EN pins.
C. Camera Module And Speakers

The high Definition camera module is compatible with all Raspberry Pi models. Provides exorbitant sensitivity, low crosstalk, and less noise image capture in an ultra-small and lightweight delineation. The camera module connects to the Raspberry Pi board with the CSI connector designed specifically for interfacing with cameras. The CSI bus is competent in extremely high data rates, and it entirely carries pixel data to the processor.
- Resolution: 8-megapixel
- Still picture resolution: 3280 x 2464
- Max image transfer rate: 1080p:30fps & 720p:60fps
- Connection to Raspberry Pi: 15-pin ribbon cable, with dedicated 15-pin MIPI Camera Serial Interface (CSI-2).
- Temp range Operating: -20º to 60º
- Stable image: -20º to 60º
Here we are using compact speaker with 3.5 mm jack which can be directly inserted in the audio pin of raspberry pi. It is cheap, small, portable and easy to use. It will be used to convert the text into voice of robot

This is the HC-SR04 ultrasonic distance sensor. The sensor HC-SR04 provides 2cm to 400cm of non-contact measurement capabilities with a ranging accuracy that reaches up to 3mm. Each HC-SR04 module consists of an ultrasonic transmitter, a receiver, and a control circuit. There are only four pins that you need to know about on the HC-SR04: VCC (Power), Trig (Trigger), Echo (Receive), and GND (Ground). This sensor has additional control circuitry that can avert inconsistent "bouncy" data pivot on the application.
E. PI Setup.
- Loading OS in Raspberry Pi
Raspberry Pi has developed a graphical SD card writing tool that works on Mac OS, Ubuntu 18.04, and Windows, and is a trouble-free option for most users as it will download the image and install it spontaneously to the SD card.
a. If you want to use Raspberry Pi Imager on the Raspberry Pi itself, you can install it from a terminal using
b. Connect an SD card reader with the SD card within.
c. Open Raspberry Pi Imager and go for the required OS from the inventory presented.
d. Choose the SD card you want to write your image to.
e. Inspect your selections and click 'WRITE' to start writing data to the SD card.
III. ADVANTAGES AND APPLICATIONS
A. Advantages
- Surveillance at low cost
- More real time live streaming.
- High resolution camera .
- Easy to use.
- Cover large areas compared to CCTV.
- Increases alert regulation.
- Camera motion can be administered by the user.
B. Application
- Military Surveillance: For tracking the terrorist activities in border security areas can be easily done by robots with camera
- In Search and Rescue Operation: Robots with cameras can be used for monitoring the situation in any disasters affected area where humans can’t reach
- In Medical Use: We can use this robot in medical purpose to monitor the movement of patients.
- For Security Purposes: At home, workplace, government offices, public-place to cope up with increasing number of threats like burglary, robbery or even terrorist activites.
- For Indoors Surveillance: Of Ware house, campus surveillance to keep the check on activities.
IV. FUTURE SCOPE
In future the project can be upgraded in more ways than one :
- Addition of more sensors, as well as temperature, pressure environment monitoring and many more attributes can be included.
- Image processing/video processing in the raspberry can be advanced through technologies like artificial intelligence and recently advancing deep learning techniques.
- Addition of Laser Gun will help robot to have self- defence in military surveillance.
- Adding unusual event discernment in order to recognize the activities of unknown or known person. As techniques used in image processing are embellishment affected, advanced algorithm can be placed to insulate the robot from light effects.
V. ACKNOWLEDGMENT
Presentation inspiration and motivation have always played an important role in the success of any journey or venture. Every orientation work has an imprint on many people and it becomes the duty of the author to express deep gratitude for the same. We have taken efforts in this project.
However, it would not have been possible without the kind of support and help of many individuals. I would like to extend my sincere thanks to all of them. We would like to take this opportunity to express a true sense of gratitude towards our project guide and our head of the department Prof. R. A. Barapate Sir for his valuable co-operation and guidance that he gave us for this project. We are highly indebted to him for his guidance and constant supervision and direction as well as for providing obligatory information regarding the project & also for his support in completing the project. We would also like to show our gratitude to our Project Co-ordinator Prof. Nazish Fatima ma'am for her continuous help and monitoring during the project work. We are also thankful and express our kind gratitude towards all the faculty members of our Electronics And Telecommunication Department and our Principal, Y.R.Soman Sir for providing us such an amazing opportunity to learn from these experiences. Last, but not least, our Parents have inspired us to face all the challenges and win all the hurdles in life, and continuously guided us throughout time. We would also like to express our appreciation and thanks to all those who knowingly or unknowingly have assisted us & encouraged us for our project.
Conclusion
The surveillance robot will be designed to deliver a reasonable level of efficiency & simplicity, providing each user with a streamlined user experience. We have successfully implemented the working of the video surveillance robot controlled by web application using Raspberry-Pi. The surveillance robot is directed at providing monitoring comprehensive of vision, motion. The robot is successfully controlled using the web application. Even the real time video feel is prosperously achieved. This system is useful in restricted area, home security and to the soldiers. The surveillance robot can be customized to fuse seamlessly to any warehouse, go- down or multi dwelling units. Based on modular & complete scalability, the surveillance robot is designed to be expandable & allow for future control upgrades, thus enhancing the accessibility of the user & providing an efficient way out of the traditional system
References
[1] Ghanem Osman Elhaj Abdalla; T. Veeramanikandasamy presented “Implementation of spy robot for a system using Internet protocol of Raspberry Pi” published on 15 January 2017 in 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT) which was held at Bangalore, India. [2] Kyunghoon Kim; Soonil Bae; Kwanghak Huh presented “Intelligent surveillance and security robot systems” published on 28 Oct. 2010 IEEE Workshop on Advanced Robotics and its Social Impacts which was held in Seoul, South Korea [3] YungeunChoe; Myung Jin Chung presented “System and Software architecture for autonomous Surveillance robots in urban environments” published in 2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) which was held in Daejeon, South Korea. [4] Neha Joisher (K. J Somaiya Institute of Engineering And I.T.), Sonal Jain (K. J Somaiya Institute of Engineering And I.T.), Tejas Malviya (K. J Somaiya Institute of Engineering And I.T.) and Vaishali Gaikwad (Pacific Academy of Higher Education & Research): \"Surveillance System Using Robotic Car\". [5] Guangming Song; Kaijian Yin; Yaoxin Zhou; Xiuzhen Cheng presented “A surveillance robot with hopping capabilities for home security” published in November 2009 in IEEE Transactions on Consumer Electronics ( Volume: 55, Issue: 4, November 2009 ). [6] S Meghana; Teja V Nikhil; Raghuveer Murali; S Sanjana; R Vidhya; Khurram J Mohammad presented “Design and implementation of Surveillance Robot for outdoor security” published on 15 January in 2017 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT). [7] Jung-Hyun Park and Kwee Bo Sim, \"A design of mobile robot based on Network Camera and sound source localization for intelligent surveillance system\", ICCAS 2008. [8] Ching-Heng Ku and Yen-Chieh Cheng, \"Remote surveillance by network robot using WLAN and mobile IPv6 techniques\", IEEE TENCON 2007, pp. 1, Oct. 2007. [9] Ki Sang Hwang; Kyu Jin Park; Do Hyun Kim, “Development of a mobile Surveillance robot”, 17-20 October 2007 International Conference on Control, Automation and Systems which was held at Seoul, South Korea. [10] R.Karthikeyan; S Karthik; Prasanna Vishal TR; S.Vignesh, “Snitch: Design and development of a mobile robot for surveillance and reconnaissance”, 13 August 2015 International Conference on Innovation in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India. [11] T.M. Sobh; R. Sanyal; Bei Wang, “Remote surveillance via the web- controlled mobile robots”, Proceedings World Automation Congress, 20 June 2004, Seville, Spain. [12] Ashish U. Bokade; V. R. Ratnaparkhe, “Video robot control using smartphone and Raspberry pi”, 24 November 2016 International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur, India. [13] Jae-Seong Han ; Sang-Hoon Ji ; Kyung-Ha Kim ; Sang-Moo Lee ; Byung-Wook Choi, “Collective robot behavior controller for a security system using open SW platform for robotic services”, 19 December 2011, 11th International Conference on Control, Automation and Systems, Gyeonggi-do, South Korea. [14] Ghanem Osman Elhaj Abdalla; T.Veeramanikandasamy, “Implementation of spy robot for a surveillance system using Internet protocol of Raspberry Pi”,15 January 2017 in 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India.
Copyright
Copyright © 2022 Anushree Deepak More, Rakshita Devendra Godiyal, Hiral Gachake, Ashwini Balaji Ghodake. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41173
Publish Date : 2022-04-02
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online