

Ijraset Journal For Research in Applied Science and Engineering Technology
A Study on Rocker-Bogie Mechanism for a Planetary Rover Prototype
Authors: Pawan N. Kakde, Dr. S. K. Choudhary
DOI Link: https://doi.org/10.22214/ijraset.2023.54061
Certificate: View Certificate
Abstract
In light of the notable rocker-bogie mechanism, this paper shows an ideal plan of a rocker-bogie suspension framework so as to ensure high mobile steadiness as well as excellent versatility of a prototype rover vehicle while traversing through rough terrains. It is essentially a suspension arrangement utilized in mechanical automated vehicles utilized explicitly for space investigation. The rocker-bogie suspension-based rovers have been effectively presented for the Mars Pathfinder and Mars Exploration Rover (MER) and Mars Science Laboratory (MSL) missions led by zenith space investigation laboratories all through the world. The proposed suspension framework is presently the most supported structure for each space investigation organization. It is basically a mechanism which comprises of two arms with wheel mounted to each and the two arms are associated through a versatile joint. The current development in design has been studied as well as a different approach towards designing the basic structure of suspension has been done. It has been further verified using various static and dynamic load calculations, solid modeling computer aided design software and simulation software for analysis and testing.
Introduction
I. INTRODUCTION
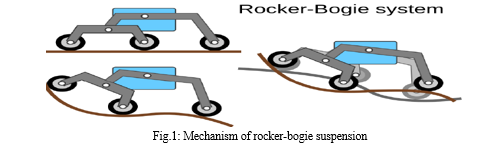
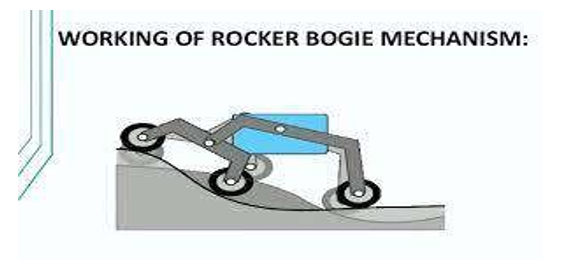
The rocker-bogie suspension design has become a proven mobility application known for its superior vehicle stability and obstacle-climbing capability. Following several technology and research rover implementations, the system was successfully flown as part of Mars Pathfinder’s Sojourner rover. When the Mars Exploration Rover (MER) Project was first proposed, the use of a rocker-bogie suspension was the obvious choice due to its extensive heritage. The challenge posed by MER was to design a lightweight rocker-bogie suspension that would permit the mobility to stow within the limited space available and deploy into a configuration that the rover could then safely use to egress from the Lander and explore the Martian surface. When building a robot you'd like it to be as simple as possible. In most cases you'd never need a suspension system, but there were several instances when a suspension system cannot be avoided. The term “bogie” refers to the links that have a drive wheel at each end. Bogies were commonly used as load wheels in the tracks of army tanks as idlers distributing the load over the terrain. Bogies were also quite commonly used on the trailers of semi-trailer trucks. Both applications now prefer trailing arm suspensions. The rocker-bogie design has no springs or stub axles for each wheel, allowing the rover to climb over obstacles, such as rocks, that are up to twice the wheel's diameter in size while keeping all six wheels on the ground. As with any suspension system, the tilt stability is limited by the height of the centre of gravity .The Rocker-Bogie design has no springs and stub axles for each wheel, allowing the rover to climb over obstacles, such as rocks, that are up to twice the wheel’s diameter in size while keeping all six wheels on the ground. As with any suspension system. the tilt stability is limited by the height of the centre of gravity. Systems using springs tend to tip more easily
The term “bogie” refers to the links that have a drive wheel at each end.
II. LITRATURE REVIEW
Inception of rocker bogie suspension framework can be followed to the improvement of planetary rover which are portable robots, particularly intended to proceed onward a planet surface. Earlier, movers were tele operated like the Lunokhod I while late ones are completely self-sufficient, for example, FIDO, and Discovery and as of late created Curiosity Mars exploration vehicle. The rovers should have been extremely powerful and dependable, as it needs to withstand dust, solid breezes, corrosion and huge temperature changes under baffling conditions. Most extreme rover vehicles stay controlled by batteries which are energized by solar photovoltaic boards during the day introduced over their surface. The motion arrangement of rover vehicles stays urgent to empower it to arrive at
target destinations, direct research, and gather information and to situate itself as indicated by the interest. There are three primary sorts of rover vehicle locomotion invented so far for example wheeled, legged and caterpillar motion. The primary contrast between the different structures of planetary robots lies in the kind of movement framework. Considerably subsequent to creating numerous legged and crossover robots, most analysts still spotlight on wheeled design for rover vehicles in view of its locomotion ease and focal points and among wheeled movement plan, the rocker bogie suspension framework-based structure stay generally supported. The antiquated FIDO rover and the Sojourner contain 6 autonomously directed and driven wheels suspended from a rocker-bogie system for most extreme suspension and ground clearance. Rocky Seven Rover has a comparative suspension framework simply contrast in front wheels. The Nanorover and Nomad Rovers have four guided wheels suspended from two bogies and CRAB Rover uses two parallel bogie-systems on each side to conquer objects and huge gaps. To the extent the underlying examination is concerned, the product advancement looks for an ideal in the restricted solution space given an underlying arrangement and infer a scientific model to sum up rover suspension parameters which characterize the geometry of the rocker bogie framework. The target behind advancement of rocker bogie suspension framework is to build up a framework which limits the vitality utilization, the vertical removal of the rover vehicle's center of gravity and its pitch angle. In this exploration our undertaking is to move the significant favorable circumstances installed with the rocker bogie framework into customary vehicles so as to expel solace and complexities present in regular suspension framework as a rule and suspension arrangement of substantial vehicles specifically
III.DEVELOPMENT IN THE DESIGN OF ROCKER-BOGIE FOR PLANETARY ROVERS
A. The Rocker-Bogie Suspension for Planetary Rover Designed by Swiss
In 2002, Swiss Federal Institute of Technology and Automation Systems Laboratory (ASL) developed a prototype of six-wheel detection vehicle called shrimp [10]. The shrimp is about 3.1kg, which the front fork-parallelogram rocker suspension is used. As shown in Figure 2, the shrimp was climbing stairs. The stability of the shrimp is good and the traffic ability of the shrimp is strong. But the area of carrying in this vehicle is greatly limited due to the limitation of the suspension structure. The suspension structure is also complicated.
In 2004, Switzerland ASL developed the six rounds of the prototype vehicle called crab, which the bilateral double parallelogram rocker suspension is used [11]. Each side of the suspension is made up of two sets of the parallelogram secondary rocker hinged at the middle wheel and a main rocker. The pole of each set of the secondary rocker is connected with the wheel. The middle pole of secondary rocker is fixedly connected with the main rocker. The main rocker is connected to the vehicle body with a differential mechanism. As shown in Figure 3, the crab was crossing the vertical wall. The stability of this vehicle is good and the terrain adaptability is strong. The platform area of carrying is much better than the shrimp. But the suspension structure is still complex
B. The Rocker-Bogie Suspension for Planetary Rover Designed by American
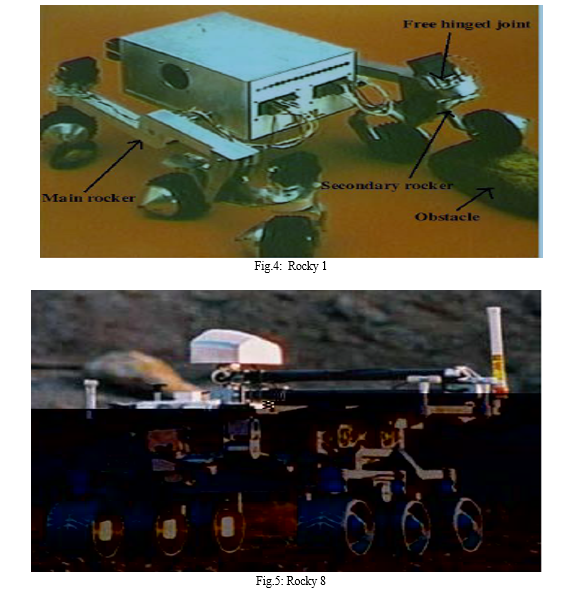
In 1987, JPL of NASA presented Rocky1 that is a basic prototype of a small 6-wheel rover which firstly used the rocker-bogie suspension [12]. The wheel radius is 4 cm. The wheel to ground distance at the same side is identical. All the wheels can be independently driven. The portion between the rear wheel and hinged joint is the primary rocker. The portion between front wheel and hinged joint is the secondary rocker. The height of free hinged joint is higher than the axis of the wheel. As it was showed in Figure 4, the rover was travelling through an obstacle without any problem. This experience revealed that the negotiation ability and the traffic ability of this rover is strong. The revolution angle of main rocker cannot be very large due to the limitation of suspension system.
Later, JPL developed lots of rovers. The Rocky 8 is the newest rover [13]. The weight reached up 30 kg (Showed in Figure 5). The wheel to ground distance at the same side is also identical. Each wheel can be also independently driven. The height of hinged joint is also greater than the centre line of the wheel. The Rocky 8 can carry more valid loading weight. It can travel at a long distance and avid obstacles.
Future combat system (FCS) designed by the U.S. Army combines many kinds of systems, which is a multifunction, networking, light and intelligent weapon system [14]. This system is gradually equipped by the U.S. Army, as the technology matures. The robot vehicle is called mule as the main transport equipment of FCS, which is used to transport weapons, ammunitions and supplies for army’s [15]. One mule can support two infantry classes and also can accompany them on the complex terrain. The primary mission of mules is transporting equipment and rucksacks about 900~1100 kg and transporting the wounded soldier to safe place.
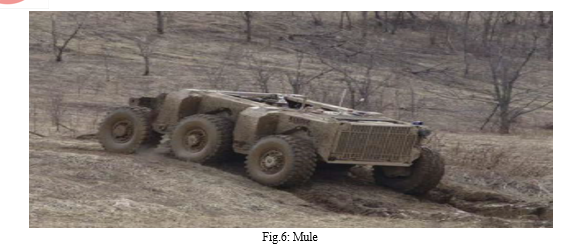
From the Figure 6, it showed that the mule could travel on the complex terrain with high manoeuvrability. "Mule" was equipped with independent articulated suspension of 6×6 chassis. Mule used brake steering device and hybrid electric drive system. The hub of each tire is equipped with an electric motor. Mule has a high resistance to destruction. If a tire is damaged or destroyed, the remaining five tires still be able to maintain sufficient mobility. The height of obstacle which the mule can across reached 1.5 m, which is much more than any other active wheeled or tracked vehicle equipped by the U.S. Army. The width of the trench which the mule can across reached 1.5 m. The slope angle is more than 40 degrees. The wade depth is at least 1.25 m.
C. The Rocker-Bogie Suspension for the Planetary Rover Designed by Chinese
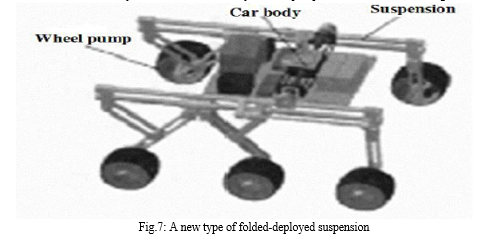
National Defense University of Science and Technology designed a new type of folded-deployed suspension, known as the two-crank-slider suspension [16]. As shown in Figure 7, the left and right suspension is symmetrical and each suspension is composed of the main rocker, two cranks, two connecting rods, two slider and torsion bar spring. The left and right suspension is connected with differential mechanism through the spline. The center of the differential mechanism is attached to the body. Both side suspensions are rotatable relative to the vehicle body. Each wheel is driven by a wheel pump. But the crank rotation angle is limited.
References
[1] Bhole, S. H. Turlapati, Raja shekhar V. S, J. Dixit, S. V. Shah, Madhava Krishna K, “Design of a Robust Stair Climbing Compliant Modular Robot to Tackle Overhang on Stairs” arXiv:1607.03077v1 [cs.RO], 11 Jul2016. [2] P. Panigrahi, A. Barik, Rajneesh R. & R. K. Sahu, Introduction of Mechanical Gear Type Steering Mechanism to Rocker Bogie, Imperial Journal of Interdisciplinary Research (IJIR) Vol-2, Issue-5, ISSN: 2454-1362,2016. [3] M. D. Manik, A. S. Chauhan, S. Chakraborty, V. R. Tiwari, “Experimental Analysis of climbing stairs with the rocker-bogie mechanism”, Vol-2 Issue-2 P.No. 957-960IJARIIE- ISSN(O)-2395- 4396,2016. [4] Y. L. Maske, S. V. Patil, S. Deshmukh, “Modeling and MBD simulation of stairclimbing robot with rocker bogie Mechanism”, International Journal of Innovative Research in Technology, 101743, Volume 1 Issue 12, Page no. 267-273, ISSN: 2349-6002, 2015. [5] N. Yadav, B. Bhardwaj, S. Bhardwaj, “Design analysis of Rocker Bogie Suspension System and Access the possibility to implement in Front Loading Vehicles”, IOSR Journal of Mechanical and Civil Engineering, e-ISSN: 2278-1684, p-ISSN: 2320-334X, Volume 12, Issue 3 Ver. III, PP 64-67, May - Jun. 2015. [6] Hong-an Yang, Luis Carlos Velasco Rojas*, Changkai Xia, Qiang Guo, School of Mechanical Engineering, Northwestern Polytechnic University, Xian, China, Dynamic Rocker-Bogie: A Stability Enhancement for High- Speed Traversal- Vol. 3, No. 3, September 2014, pp. 212~220 ISSN: 2089-4856. [7] ] Brooks Thomas; Graham Gold; Nick Sertic; DARK ROVER ROCKER-BOGIE OPTIMIZATION DESIGN, The University of British Columbia, Project Number 1076 January 18, 2011 [8] F. Ullrich, A. Haydar G., S. Sukkarieh, Design Optimization of a Mars Rovers Rocker- Bogie Mechanism using Genetic Algorithms, Proceedings from 10th Australian Space Science Conference, Page No. 199-210,2010. [9] D. Harrington and C. Voorhees, The Challenges of Designing sthe Rocker-Bogie Suspension for the Mars Exploration Rover, Proceedings of the 37th Aerospace Mechanisms Symposium, Johnson Space Center, page No. 185-1985, May 19-21,2004. [10] L. Bruzzone and G. Quaglia, “Review article: locomotion systems for ground mobile robots in unstructured environments”, Mech. Sci., 3, 49–62, 2012. DOI: 10.5194/ms-3- 49- 201
Copyright
Copyright © 2023 Pawan N. Kakde, Dr. S. K. Choudhary. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET54061
Publish Date : 2023-06-14
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online