

Ijraset Journal For Research in Applied Science and Engineering Technology
Searching and Separation of Waste Using Robot
Authors: Paul Living X, Abishek P, Ranjith K, Mr. B Arun Vijayakumar
DOI Link: https://doi.org/10.22214/ijraset.2022.44535
Certificate: View Certificate
Abstract
Increased waste levels have made it important for proper waste management systems and procedures. Now India day is not working well in the field of environmental cleanup, it means collecting all the waste, putting it away and separating for recycling process. Dumping of garbage in local areas creates polluting conditions. It can cause many bad diseases in humans and can cause air, water, and land pollution. It also contributes to global warming. The program consists of two modules, the first module contains a pi cam with tensor flow software, and the second module contains Robotic Arm and, Robotic chase to pick up trash and the trash can be separated afterwards. The main part or purpose of this work is a clean and tidy environment by separating the waste for Reusability process. The project supports waste management and helps to control global warming, reduces pollution and decrease workers time and work. This project supports the goal of a clean swatch bharat. This project is mainly designed to clean the parks and the ground so that we can clean large area to protect our environment.
Introduction
I. INTRODUCTION
The very piece of plastic ever made still exists and may continue to do so for the next 500 years if we do not reduce its usage it will stay at that stage. Of course, recycling is the first option that governments across the world are turning to, but what about a country like India with a recycling rate of merely 30 per cent? India, with a population of 1.3 billion, generates around 62 million tones of annual waste, as per the Ministry of Environment, Forest and Climate Change. We can only collect 43 million tons of waste annually in which 11.9 tons of wastes are treated and others are dumped into Oceans and landfills. Dumping is not a great option it is harmful to land, air and aquatic life. Plastic is a greater example which will not decompose for centuries. Now a day we recycle the plastic into building materials, furniture, carpet, bags etc only monitoring and storing waste is not much a problem but the real problem is separation of the waste so that we can further process means recycling the waste into useful product. Engineers are developing new ways of expanding recycled plastics by developing intelligent robots that can detect, filter, and disperse different types of waste. The recycling robotic automation system will use artificial intelligence and computer vision to identify different form of recycling waste, effectively learn how to ‘see’ and ‘sort’ waste to maintain purity so that they can be recycled. Currently India is facing a big challenge related to waste, which is poor waste collection, transport, treatment, and disposal. Current systems in India require large number of workers and to cover large surface area. So we propose a solution to use robots for searching and separating the waste so that work of the workers will also reduce and we can cover a large area to segregate waste and protect the environment.
II. RELATED WORKS
Dr. A. Brintha Therese and Prashant Gupta proposed to create Robotic Arm with Real - Time image processing using Raspberry Pi which can either automated or can be operated manually. The main aim of their project is to make a robot that has the capability to pick a pre – specified object and placing it in separate divisions based on colors. Raspberry Pi has found its way in many useful and challengeable implementations in robotic systems. The python code is formulated to create a robotic arm with image processing and local web page with slider to adjust servo motor position. When image has been processed to identify the color of the object, the robotic arm can pick the object one by one and place the object at particular place for particular color. In their project the arm module can segregate three colors and place the objects in three different places.
P. Hemalatha, C.K.Hemantha Lakshmi, Dr.S.A.K.Jilani have proposes Real-time Image Processing based Robotic Arm Control Standalone System using Raspberry pi. In this project they have made a robot capable of surveillance and also with an alternate application in detecting and following a pre specified object. The detection and recognition has been done using open CV library. The whole code for Object detection is written in MATLAB Simulink to program the controlling of one arm robot using Raspberry Pi for the identification of objects and tracking object operations without any manual control. The total programming model is developed in MATLAB Simulink support package for raspberry Pi hardware.
The program includes capturing the object image, processing, identifying the green object and controlling of robotic arm by using Raspberry Pi. Computer vision is focused on motion analysis of robot arm revealed that gesture can be characterized based on four different aspects: shape, motion, position and orientation.
Jash Shah and Sagar Kamat proposed a system to identify, remove, and sort items on a moving conveyor using computer vision and artificial intelligence (AI). CNN (Convolutional neural networks) characteristics are used by the majority of today’s top-performing object detection networks. A more automated approach allows us to ship fewer recyclables to landfills. In this paper, they built three models, namely ResNet-34, VGG16 and a proposed deep neural network for image classification, segmentation, and detection and compared the results that we obtained. The categorization of recyclable and organic materials is a difficult topic that necessitates the use of advanced approaches. A worldwide strategy for industrial applications is required, in addition to dataset gathering. They offer a more accurate and optimum waste categorization approach in this study. In this work, the desired shape of input images is 224x224 with an RGB color scheme. The CNN used in this work contains 6 Conv2D layers, 3 MaxPool2D layers and three fully connected dense layers. ReLU acts as the activation function in the fully connected layers. The output layer contains only a single neuron which will contain values as 0 or 1, where 0 stands for class (’Organic’) and 1 for class (’Recycled’).
Jinqiang Bai, Shiguo Lian, Zhaoxiang Liu, Kai Wang and Dijun Liu have published a novel garbage pickup robot which operates on the grass. The robot is able to detect the garbage accurately and autonomously by using a deep neural network for garbage recognition. In addition, with the ground segmentation using a deep neural network, a novel navigation strategy is proposed to guide the robot to move around. With the garbage recognition and automatic navigation functions, the robot can clean garbage on the ground in places like parks or schools efficiently and autonomously. Experimental results show that the garbage recognition accuracy can reach as high as 95%, and even without path planning, the navigation strategy can reach almost the same cleaning efficiency with traditional methods. Thus, the proposed robot can serve as a good assistance to physical labour on garbage cleaning tasks. Besides, deep neural networks (e.g. deep convolution networks) have been applied with great success to the detection, segmentation and recognition of objects in images. Therefore, we employ a convolution neural network (CNN) for recognizing and locating the garbage in images captured by a web camera equipped on the robot. Moreover, the network can also be used to detect and segment the ground, which is useful for obstacle avoidance. This proposed system will identify and segregate waste without human involvement. The proposed system mainly focuses on identification, classification, and segregation of waste using YOLOV3 algorithm. The sample data set is a combination of various kaggle dataset, converted in coco format. The proposed system uses custom dataset containing 2000 images of dry waste, wet waste, hazardous waste and plastic waste. Out of 2000 images model uses 1000 images for training and 500 images for testing. The proposed system uses Dark net an open source neural network framework, to train custom dataset. It has an auto update facility i.e. when a new object is found then based on the previous predictions it will find probability and classify it.
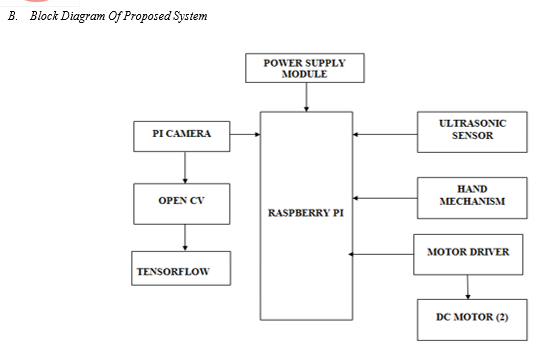
III. PROPOSED SYSTEM
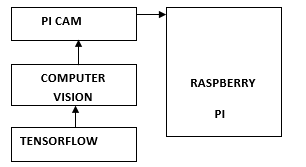
The proposed system is an embedded system which search for Waste materials using TensorFlow which is a part of Computer Vision. It uses the data which we have uploaded and searches for the perfect match and when the object is detected our project module will use its robotic arm to pick that object and movement is controlled to the direction where we should store that particular object. When it sees the particular color like Red it will put the paper object down. After putting the object it will then again search for the other waste materials like plastic and when it finds that object it will pick that object and then when it sees green color it will put down the plastic material. After that it will again search for other waste materials till the whole area is cleaned. Our model can find out five types of object which can be searched and separated using Machine learning algorithm.
A. Block Diagram for Computer Vision
IV. RESULTS AND DISCUSSION
In the prototype shown as in fig 1. The Raspberry Pi is connected to the Pi Cam, Robotic Arm, IR sensor, Motor Driver, 2 Dc motors and 2 Power Supply Module Lots of experiments has been conducted to control the robotic arm using Raspberry Pi. The image has been processed to find the waste materials which it should pick and place. This experiment has done for maximum accuracy to perform a task.

In this project lots of github files are used as reference to create a program which will search and separate waste. But needed requirements were mainly a trained Dataset which will help for object detection. We use LabelImg software to create our own custom model so that we can train our own model.
The fig 2 camera module connects to the Raspberry Pi via a 15-pin ribbon cable to the unique 15-pin MIPI Camera Serial Interface (CSI), which was created specifically for camera interface. CSI bus transfers data at a very high speed, and it is also used to carry pixel data to the BCM2835 processor which helps us in computer vision to process the image. It will process the data using TensorFlow and compare the image with dataset which we created using label img software. First we took 50 images of paper and plastic each and then open label img software and open the photos we are going to train and create a rectangular box to identify the object which we are going to train. After finishing this process we create two more folders one to train the images and another one is for validating those images. The program will compare both folders for perfect matches and detect the object we have uploaded.
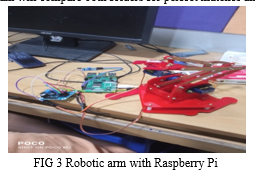
A robotic arm is a programmable mechanism comprising two or more segments linked by means of joints into a kinematic chain. Each joint in the chain is a servo or another motor providing either rotational or linear displacement of the segments. The number of linkages in the structure defines how many freedom degrees (DOF) it has typically, ranging from two to the human arm maximum of seven. The basic function of a pick and place robot is done by its joints. Robotic arm is an electro mechanical system with functions similar to that to that human arm. Totally four mg 995 servo motors are used for movement of arm. The first one and second one is used for movement of forward and backward and the third one is for side ward, the fourth one is for opening and closing of gripper to hold the objects. It is used to pick and place objects which we have uploaded such as plastic and plastic.
Conclusion
Waste management is big issue all over the world and need attention the otherwise can causes the pollution on air, water and lands. It is one of the major causes for global warming and wastes in local area can cause infectious diseases. So it should be maintained properly but all the wastes cannot be handled or collected properly by workers in time. In this project raspberry pi and image processing using pi cam is used which detects the waste and collects the waste using the robotic chase and robotic arm and puts inside separate box. It reduces the manpower and work time .and can be used vastly and is environmental friendly. This project will play a big role in cleaning and reduce work of workers for clean and pollution free world.
References
[1] Dr. A. Brintha Therese and Prashant Gupta, “Robotic arm with real-time image processing using raspberry pi, both automated and manually,” International Journal of Advanced Research, ISSN: 2320-5407, March 2018. [2] P. Hemalatha, C.K.Hemantha Lakshmi, Dr.S.A.K.Jilani, “Real time Image Processing based Robotic Arm Control Standalone System using Raspberry pi”, SSRG International Journal of Electronics and Communication Engineering (SSRG-IJECE) – Volume 2 Issue 8–August 2015. [3] Jash shah and Sagar Kamat “A Method for Waste Segregation using Convolutional Neural Networks,” arXiv:2202.12258v1 [cs.CV] 23 Feb 2022. [4] Jinqiang Bai, Shiguo Lian, Member, IEEE, Zhaoxiang Liu, Kai Wang, Dijun Liu, “Deep Learning Based Robot for Automatically Picking up Garbage on the Grass,” IEEE Transactions on Consumer Electronics 0000-0003-4322-6598, March 2018. [5] Meena.U, Shailaja.R, Swanit.R and Prajakta, “Waste Segregation Using Deep Learning,” in Journal of Information and Computational Science Volume 10 Issue 5 ISSN: 1548-7741, April 2020. [6] Muhammad Abbas Khan, Dr.Muhammad Zubair Khan, Hammad Khan, Muhammad Hanzla, Muhammad Jamal, Taimoor Khalid, Naqeeb Ullah, “Garbage collector robot”, in International Journal of Science and Technology, Volume: 13, Issue: 20, 2065-2070 April 2020. [7] Sunil M.P, Shravya Chaand P.K, Bhavya Grandhe, and Hariprasad S.A, “IJISET - International Journal of Innovative Science, Engineering & Technology”, Vol. 7 Issue 12, ISSN (Online) 2348 – 7968 December 2020. [8] Simonyan and Zisserman, “Very Deep Convolutional Networks for large-scale image recognition, ”Published as a conference paper at ICLR March 2015. [9] M. C. Kang, K. S. Kim, D. K. Noh, J. W. Han and S. J. Ko, “A robust obstacle detection method for robotic vacuum cleaners,” IEEE Trans. Consum. Electron, vol. 60, no. 4, pp. 587-595, Nov. 2014. [10] S. Kulkarni and S. Junghare, “Robot based indoor autonomous trash detection algorithm using ultrasonic sensors,” in 2013 Int. Conf. Control, Autom. Robot Embedded Syst. (CARE), Jabalpur, 2013, pp. 1-5. [11] C. Y. Tsai, C. C. Wong, C. J. Yu, C. C. Liu and T. Y. Liu, “A hybrid switched reactive-based visual servo control of 5-DOF robot manipulators for pick-and-place tasks,” IEEE Syst. J., vol. 9, no. 1, pp. 119-130, Mar. 2015. [12] S. Watanasophon and S. Ouitrakul, “Garbage collection robot on the beach using wireless communications,” in 2014 3rd Int. Conf. Inform., Environ. Energy, Appl., Singapore, 2014, pp. 92- 96. [13] L., Yann, Y. Bengio and G. Hinton, “Deep learning,” Nature, vol. 521, no. 7553, pp. 436-444, May 2015. [14] F. Yuan, S. Hu, H. Sun and L. Wang, “Design of cleaning robot for swimming pools,” in 2011 Int. Conf. Manage. Sci. Ind. Eng. (MSIE), Harbin, 2011, pp. 1175-1178. [15] H. Zhang, J. Zhang, G. Zong, W. Wang and R. Liu, “Sky Cleaner 3: a real pneumatic climbing robot for glass-wall cleaning,” IEEE Robot. Autom. Mag., vol. 13, no. 1, pp. 32-41, Mar. 2006.
Copyright
Copyright © 2022 Paul Living X, Abishek P, Ranjith K, Mr. B Arun Vijayakumar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44535
Publish Date : 2022-06-19
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online