

Ijraset Journal For Research in Applied Science and Engineering Technology
Sensor Based Wheelchair by Speech Recognition
Authors: Raj Singh, Sanjeev Gupta, Jeetesh , Sahil Singh, Abhishek Yadav
DOI Link: https://doi.org/10.22214/ijraset.2022.43160
Certificate: View Certificate
Abstract
According to research there are about 6 million populations in the world who are paralyzed and needs a wheelchair for their mobility. Earlier the wheelchairs had to be moved and be externally supported by any person. To help overcome this “joystick-controlled wheelchairs” are developed. But in regular use, these joystick-controlled wheelchairs became difficult to use. Especially in the case of paralyzed people, the use of joystick became more difficult due to the hard buttons and unidirectional use of the joysticks. To overcome these problems, we’ve tried to develop a “gesture-controlled wheelchair” which can be moved with a slight tilt of the hand. This can be used in both hands and can be controlled to come to the user from a distance. The current work is implemented with Arduino based devices such as Arduino UNO processors and programmed through Arduino IDE.
Introduction
I. INTRODUCTION
This project proposes an integrated approach to real time detection, tracking and direction recognition of Voice, which is intended to be used as a human-robot interaction interface for the intelligent wheelchair. This paper is to demonstrate that accelerometers can be used to effectively translate Voice into computer interpreted signals. For gesture recognition the accelerometer data is calibrated and filtered. The accelerometers can measure the magnitude and direction of gravity in addition to movement induced acceleration. To calibrate the accelerometers, we rotate the device “sensitive axis with respect to gravity and use the resultant signal as an absolute measurement. Integrating a single chip wireless solution with a MEMS accelerometer would yield an autonomous device small enough to apply to the fingernails, because of their small size and weight. Accelerometers are attached to the fingertips and back of the hand. Arrows on the hand show the location of accelerometers and their sensitive directions, that the sensitive direction of the accelerometer is in the plane of the hand. The Voice-based wheelchair is suitable for the elderly and the physically challenged people who are unfortunate to have lost ability in their limbs due to paralysis or by birth or by old age.
This sensor finds the tilt and makes use of the accelerometer to change the direction of the wheelchair depending on tilt. For example, if the tilt is to the right side, then the wheelchair moves in right direction or if the tilt is to the left side, then the wheelchair moves in left direction. Wheelchair movement can be controlled in Forward, Reverse, and Left and Right direction along with obstacle detection using ultrasonic sensor. Automation is the most frequently spelled term in the field of electronics. The hunger for automation brought many revolutions in the existing technologies. One among the technologies, which had greater developments, is the MEMS ACCELEROMETER SENSOR. These had greater importance than any other technologies due its user-friendly nature. MEMS ACCELEROMETER SENSOR based devices can be easily reachable to the common man due to its simpler operation.
A. Development Board
A microprocessor development board is a printed circuit board containing a microprocessor and the minimal support logic needed for an electronic engineer or any person that wants to become acquainted with the microprocessor on the board and to learn to program it. It also served users of the microprocessor as a method to prototype applications in products.
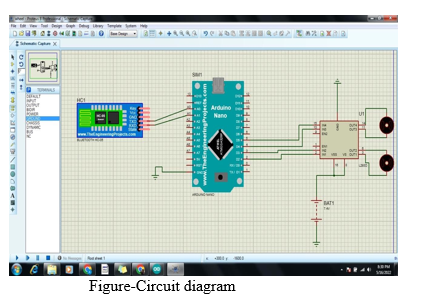
B. Circuit Design
A circuit is any loop through which matter is carried. For an electronic circuit, the matter carried is the charge by electronics and the source of these electrons is the positive terminal of the voltage source. When this charge flows from the positive terminal, throughout the loop and reaches the negative terminal, the circuit is said to be completed. However, this circuit consists of several components which affects the flow of charge in many ways. Some may provide hindrance to the flow of charge, some simple store or dissipate charge. Some require external source of energy, some supply energy
C. Block Diagram
The block diagram for whole project is given where power supply is given at initial from starting, rectifier and regulator are used then a display LCD is attached to them, and Arduino UNO with Bluetooth module and wheelchair are connected, and UNO receives the gesture from any of the four explained in diagram.
D. Hardware Required
Arduino Nano, BLUETOOTH MODULE HC05, Mobile Device, DC Gear MOTOR, Resistors, Capacitors, Push Button, Charging Connector, 1200MAH Battery, Castor Wheel, Simple Wheel, 3D Printed Chassis, Cables & Connectors, Motor Driver, PCB, Adapter/Power Supply
E. Coding
Python is a beginner-friendly programming language that is used in schools, web development, scientific research, and in many other industries. Python is a wonderful and powerful programming language that's easy to use (easy to read and write) and with Raspberry Pi lets you connect your project to the real world.
It can be done either on raspberry pi or by Arduino UNO, but we will prefer Arduino UNO.
F. Arduino Nano
Arduino board designs use a variety of microprocessors and controllers. The boards are equipped with sets of digital and analog input/output (I/O) pins that may be interfaced to various expansion boards ('shields') or breadboards (for prototyping) and other circuits. The boards feature serial communications interfaces, including Universal Serial Bus (USB) on some models, which are also used for loading programs. The microcontrollers can be programmed using the C and C++ programming languages, using a standard API which is also known as the Arduino language, inspired by the Processing language and used with a modified version of the Processing IDE. In addition to using traditional compiler toolchains, the Arduino project provides an integrated development environment (IDE) and a command line tool developed in Go.
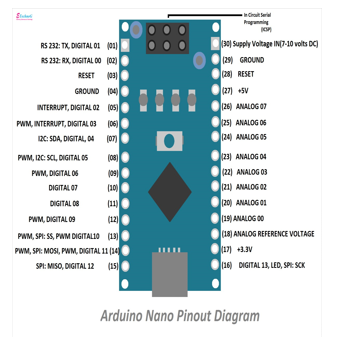
G. Arduino NANO Pinout Diagram
Arduino is an open-source hardware platform that is readily available for hobbyists & enthusiasts across the globe to build projects. It comes with an ATMEGA microcontroller that processes the data and facilitates the proper working of the IOT system
H. Features
ATmega328P Microcontroller is from 8-bit AVR family
Operating voltage is 5 V
Input voltage (VIN) is 7V to 12V
Input / Output Pins are 22
Analog I / P pins are 6 from A0 to A5
Digital Pin are 14
KB SRAM is 2 KB
EEPROM is 1 KB
CLK speed is 16 MHz
Size of the printed circuit board is 18 X 45mm
Supports three communications like SPI, IIC, & USART
I. Bluetooth Module
Bluetooth module is utilized as UART RS232 serial converter module. It can efficiently exchange the UART data through the wireless Bluetooth, without complex piece design or profound learning in the Bluetooth programming stack. This module can be utilized as a part of Master or Slave Mode and simple switchable between these two modes, by default Slave mode is designed. To setup Wireless Serial Communication, HC-05 Bluetooth Module is most requesting and prominent because of its low cost and to a great degree high highlights.
J. PCB
A printed circuit board (PCB) mechanically supports and electrically connects electronic components or electrical components using conductive tracks, pads and other features etched from one or more sheet layers of copper laminated onto and/or between sheet layers of a non-conductive substrate. Components are generally soldered onto the PCB to both electrically connect and mechanically fasten them to it.
K. Capacitor Diodes and resistance
A diode is a two-terminal electronic component that conducts current primarily in one direction (asymmetric conductance); it has low (ideally zero) resistance in one direction,
The resistor is a passive electrical component to create resistance in the flow of electric current. In almost all electrical networks and electronic circuits they can be found. The resistance is measured in ohms. An ohm is the resistance that occurs when a current of one ampere passes through a resistor with a one volt drop across its terminals
L. L293D Motor Driver
A motor driver is an integrated circuit chip which is usually used to control motors in autonomous robots. Motor driver act as an interface between Arduino and the motors. The most commonly used motor driver IC’s are from the L293 series such as L293D, L293NE, etc. These ICs are designed to control 2 DC motors simultaneously. L293D consist of two H-bridge. H-bridge is the simplest circuit for controlling a low current rated motor. We will be referring the motor driver IC as L293D only. L293D has 16 pins.

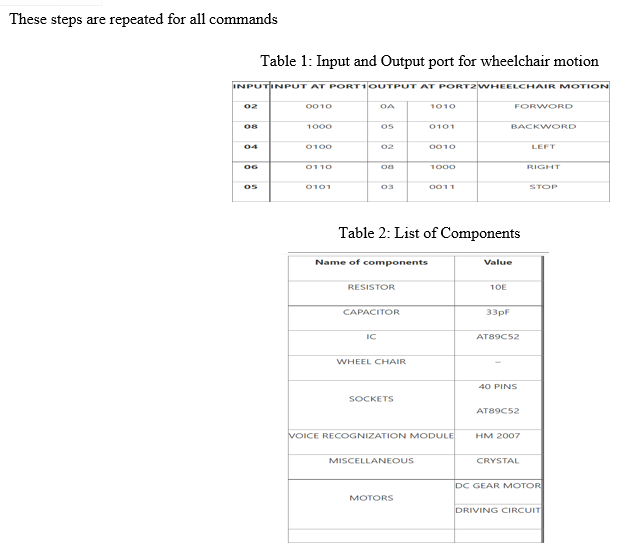
II. HOW TO RUN PROJECT
Switch on the power supply of voice module to provide sufficient voltage for proper working
Switch on the interrupt switch and give your speech command as per requirement of movement of wheelchair to voice module.
After given the speech command switch off the interrupt switch to avoid any other noise interference to voice module from error.
Voice module generate hex code correspond to input speech. Ex, if we speak forward then output of voice module is 02h.
That code is applied to input port 1 of the AT89C52 micro controller.
Micro controller generate correspond code ex02h (0010) which is given to both motor driver to drive the motor in forward direction.
V. RESULTS AND DISCUSSION
After a detailed study of various methods used to improve the effectiveness of wheelchair used by crippled people, we move to a wheelchair is fully capable of carrying the load of a person and moving in accordance with the gesture or speech given by the person who is using the wheelchair. Certain improvisation and improvement can be done to make the wheelchair more reachable to those whose whole body is paralyzed. Certain eyes gesture or brain signals reader can be imparted on the wheelchair system to make it better
References
[1] S. D. Suryawanshi, J. S. Chitode, S. S. Pethakar,2013, Voice Operated Intelligent Wheelchair.” [2] Kharka Bahadur Rai, Jeetendra Thakur, Nirmal Rai, Volume No.04, Issue No. 06, June 2015 voice-controlled wheelchair using arduino,” [3] Simpson RC, Levine SP, IEEE Trans Neural System Rehabilitation Eng. 2000, 122-125,” Voice control of a powered wheelchair powered wheelchair [4] UCHIYAMA Saburo and TElIMA Noriyuki, \"Effective operation of power wheelchair by using speech recognition symem\", Proceedings of 75\'bAnnual conference of Japan Society of Mechanical Engineers, pp. 92-93, May. 1998 [5] S.-Y. Cho, A. Winod and K. Cheng, \"Towards a Brain-Computer Interface based control for next generation electric wheelchairs\", Power Electronics Systems and Applications 2009. PESA 2009. 3rd International Conference, 2009. [6] U. I. F. Qidwai, \"Arabic speech-controlled wheelchair: A fuzzy scenario\", Information Sciences Signal Processing and their Applications (ISSPA) 2010 10th International Conference, 2010. [7] R. Akmeliawati, F. Tis and U. Wani, \"Design and development of a hand-glove controlled wheelchair\", Mechatronics (ICOM) 2011 4th International Conference, 2011
Copyright
Copyright © 2022 Raj Singh, Sanjeev Gupta, Jeetesh , Sahil Singh, Abhishek Yadav. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43160
Publish Date : 2022-05-23
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online